Read the fucking source code! --By 鲁迅A picture is worth a thousand words. --By 高尔基Linux系统在访问设备的时候,存在以下几种IO模型:
Blocking IO Model,阻塞IO模型;Nonblocking I/O Model,非阻塞IO模型;I/O Multiplexing Model,IO多路复用模型;Signal Driven I/O Model,信号驱动IO模型;Asynchronous I/O Model,异步IO模型;今天我们来分析下IO多路复用机制,在Linux中是通过select/poll/epoll机制来实现的。
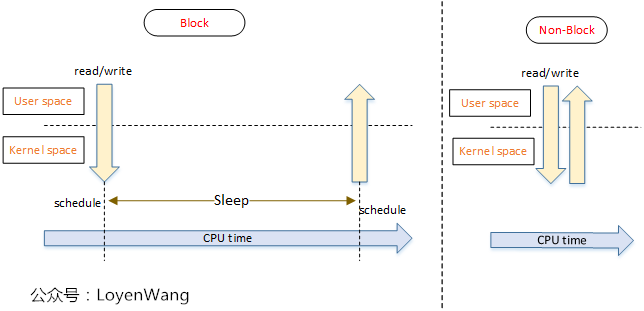
先看一下阻塞IO模型与非阻塞IO模型的特点:
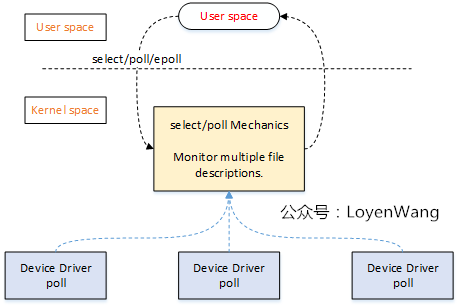
对单个设备IO操作时,问题并不严重,如果有多个设备呢?比如,在服务器中,监听多个Client的收发处理,这时候IO多路复用就显得尤为重要了,来张图:
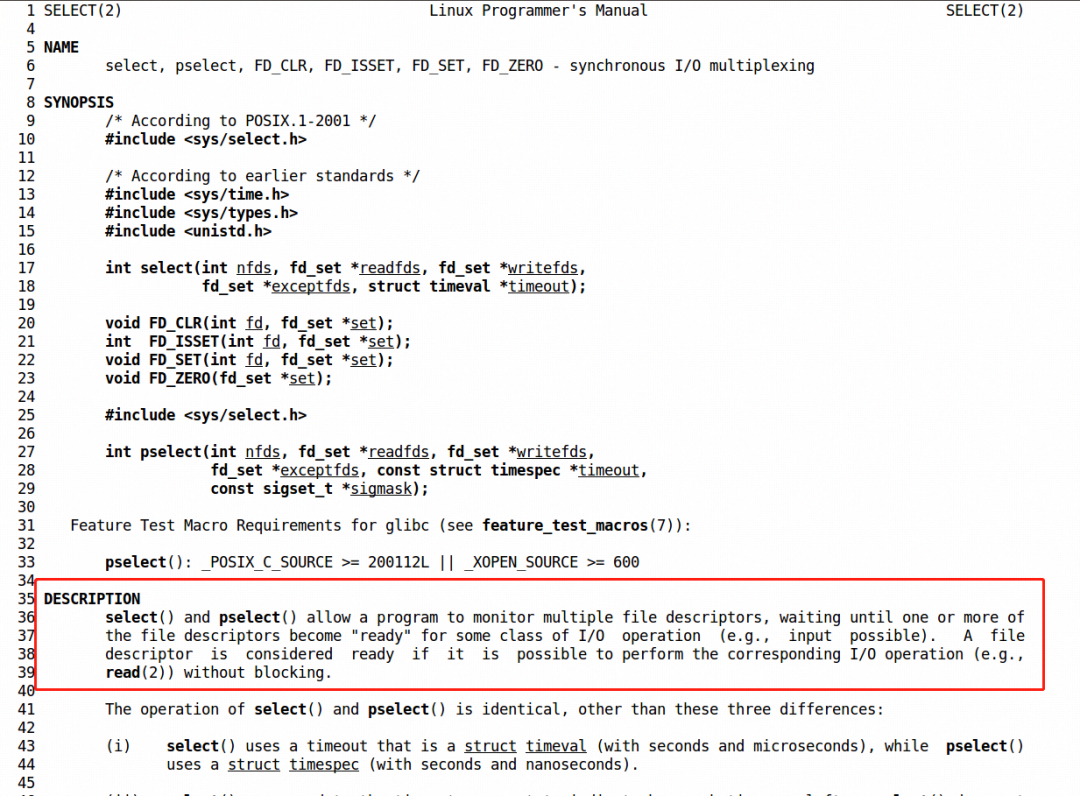
如果这个图,让你有点迷惑,那就像个男人一样,man一下select/poll函数吧:
select:
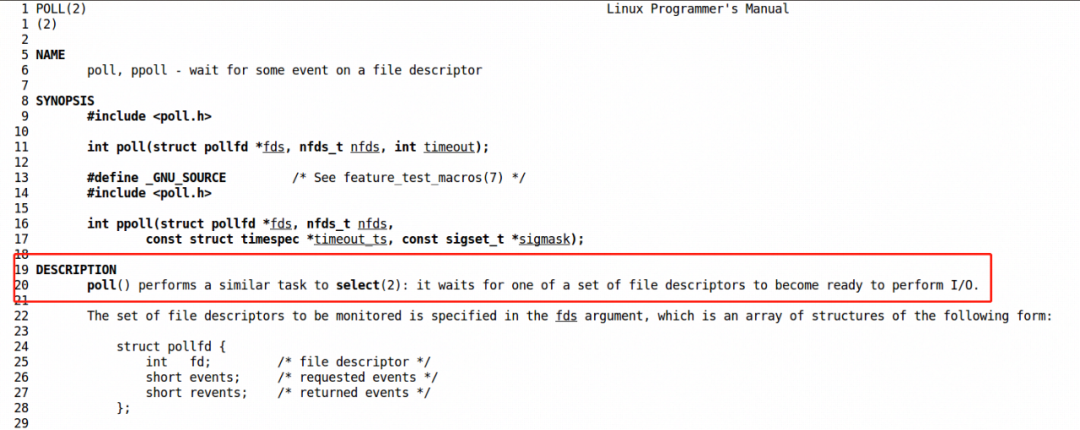
poll
简单来说,select/poll能监听多个设备的文件描述符,只要有任何一个设备满足条件,select/poll就会返回,否则将进行睡眠等待。看起来,select/poll像是一个管家了,统一负责来监听处理了。
已经迫不及待来看看原理了,由于底层的机制大体差不多,我将选择select来做进一步分析。
从select的系统调用开始:

select系统调用,最终的核心逻辑是在do_select函数中处理的,参考fs/select.c文件;do_select函数中,有几个关键的操作:poll_wqueues结构,包括几个关键函数指针的初始化,用于驱动中进行回调处理;f_op->poll()函数,如果有监测条件满足,则会跳出循环;poll_schedule_timeout让当前进程进行睡眠,超时唤醒,或者被所属的等待队列唤醒;do_select函数的循环退出条件有三个:poll()函数,会在do_select()中被调用,而驱动中的poll()函数,需要调用poll_wait()函数,poll_wait函数本身很简单,就是去回调函数p->_qproc(),这个回调函数正是poll_initwait()函数中初始化的__pollwait();所以,来看看__pollwait()函数喽。
__pollwait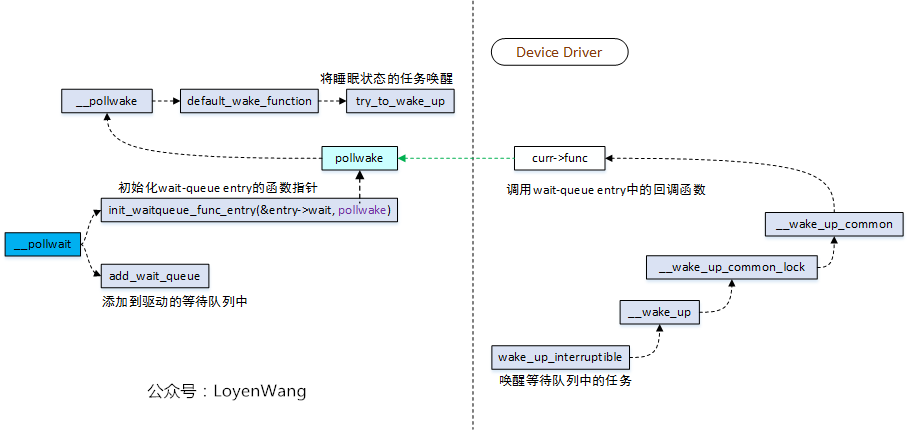
poll_wait函数回调__pollwait,这个函数完成的工作是向struct poll_wqueue结构中添加一条poll_table_entry;poll_table_entry中包含了等待队列的相关数据结构;pollwake;wake_up_interruptile等接口来唤醒处理;这一顿操作,其实就是驱动向select维护的struct poll_wqueue中注册,并将调用select的任务添加到驱动的等待队列中,以便在合适的时机进行唤醒。所以,本质上来说,这是基于等待队列的机制来实现的。
是不是还有点抽象,来看看数据结构的组织关系吧。
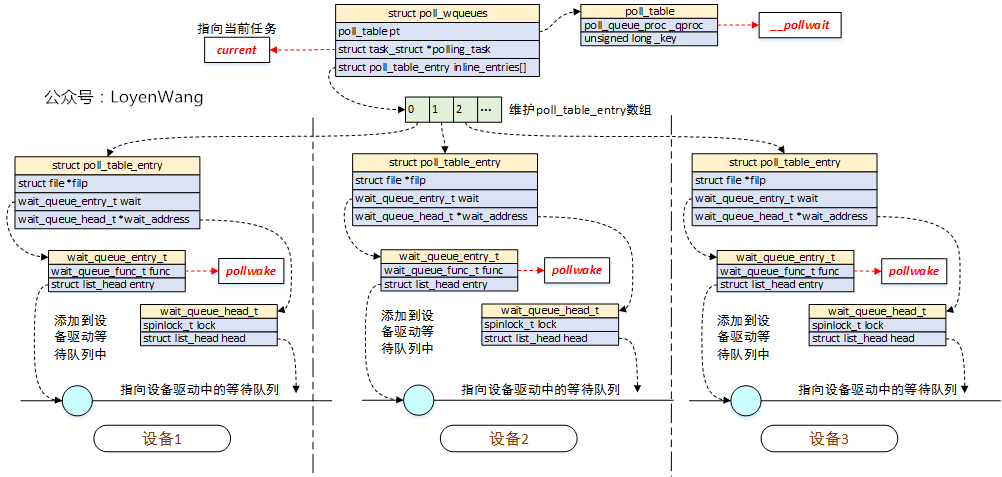
select系统调用的进程/线程,会维护一个struct poll_wqueues结构,其中两个关键字段:pll_table:该结构体中的函数指针_qproc指向__pollwait函数;struct poll_table_entry[]:存放不同设备的poll_table_entry,这些条目的增加是在驱动调用poll_wait->__pollwait()时进行初始化并完成添加的;如果驱动中要支持select的接口调用,那么需要做哪些事情呢?如果理解了上文中的内容,你会毫不犹豫的大声说出以下几条:
wait_queue_head_t,用于收留等待队列任务;struct file_operations结构体中的poll函数需要实现,比如xxx_poll();xxx_poll()函数中,当然不要忘了poll_wait函数的调用了,此外,该函数的返回值mask需要注意是在条件满足时对应的值,比如EPOLLIN/EPOLL/EPOLLERR等,这个返回值是在do_select()函数中会去判断处理的;wake_up_interruptible唤醒任务,当然也可以使用wake_up,区别是:wake_up_interruptible只能唤醒处于TASK_INTERRUPTIBLE状态的任务,而wake_up能唤醒处于TASK_INTERRUPTIBLE和TASK_UNINTERRUPTIBLE状态的任务;select/poll的差异select与poll本质上基本类似,其中select是由BSD UNIX引入,poll由SystemV引入;select与poll需要轮询文件描述符集合,并在用户态和内核态之间进行拷贝,在文件描述符很多的情况下开销会比较大,select默认支持的文件描述符数量是1024;epoll机制,改进了select与poll在效率与资源上的缺点,未深入了解;示例代码中的逻辑:
ioctl来进行设置;#include <linux/init.h>#include <linux/module.h>#include <linux/poll.h>#include <linux/wait.h>#include <linux/cdev.h>#include <linux/mutex.h>#include <linux/slab.h>#include <asm/ioctl.h>#define POLL_DEV_NAME "poll"#define POLL_MAGIC 'P'#define POLL_SET_COUNT (_IOW(POLL_MAGIC, 0, unsigned int))struct poll_dev {struct cdev cdev;struct class *class;struct device *device;wait_queue_head_t wq_head;struct mutex poll_mutex;unsigned int count;dev_t devno;};struct poll_dev *g_poll_dev = NULL;static int poll_open(struct inode *inode, struct file *filp){filp->private_data = g_poll_dev;return 0;}static int poll_close(struct inode *inode, struct file *filp){return 0;}static unsigned int poll_poll(struct file *filp, struct poll_table_struct *wait){unsigned int mask = 0;struct poll_dev *dev = filp->private_data;mutex_lock(&dev->poll_mutex);poll_wait(filp, &dev->wq_head, wait);if (dev->count > 0) {mask |= POLLIN | POLLRDNORM;/* decrease each time */dev->count--;}mutex_unlock(&dev->poll_mutex);return mask;}static long poll_ioctl(struct file *filp, unsigned int cmd,unsigned long arg){struct poll_dev *dev = filp->private_data;unsigned int cnt;switch (cmd) {case POLL_SET_COUNT:mutex_lock(&dev->poll_mutex);if (copy_from_user(&cnt, (void __user *)arg, _IOC_SIZE(cmd))) {pr_err("copy_from_user fail:%d\n", __LINE__);return -EFAULT;}if (dev->count == 0) {wake_up_interruptible(&dev->wq_head);}/* update count */dev->count += cnt;mutex_unlock(&dev->poll_mutex);break;default:return -EINVAL;}return 0;}static struct file_operations poll_fops = {.owner = THIS_MODULE,.open = poll_open,.release = poll_close,.poll = poll_poll,.unlocked_ioctl = poll_ioctl,.compat_ioctl = poll_ioctl,};static int __init poll_init(void){int ret;if (g_poll_dev == NULL) {g_poll_dev = (struct poll_dev *)kzalloc(sizeof(struct poll_dev), GFP_KERNEL);if (g_poll_dev == NULL) {pr_err("struct poll_dev allocate fail\n");return -1;}}/* allocate device number */ret = alloc_chrdev_region(&g_poll_dev->devno, 0, 1, POLL_DEV_NAME);if (ret < 0) {pr_err("alloc_chrdev_region fail:%d\n", ret);goto alloc_chrdev_err;}/* set char-device */cdev_init(&g_poll_dev->cdev, &poll_fops);g_poll_dev->cdev.owner = THIS_MODULE;ret = cdev_add(&g_poll_dev->cdev, g_poll_dev->devno, 1);if (ret < 0) {pr_err("cdev_add fail:%d\n", ret);goto cdev_add_err;}/* create device */g_poll_dev->class = class_create(THIS_MODULE, POLL_DEV_NAME);if (IS_ERR(g_poll_dev->class)) {pr_err("class_create fail\n");goto class_create_err;}g_poll_dev->device = device_create(g_poll_dev->class, NULL,g_poll_dev->devno, NULL, POLL_DEV_NAME);if (IS_ERR(g_poll_dev->device)) {pr_err("device_create fail\n");goto device_create_err;}mutex_init(&g_poll_dev->poll_mutex);init_waitqueue_head(&g_poll_dev->wq_head);return 0;device_create_err:class_destroy(g_poll_dev->class);class_create_err:cdev_del(&g_poll_dev->cdev);cdev_add_err:unregister_chrdev_region(g_poll_dev->devno, 1);alloc_chrdev_err:kfree(g_poll_dev);g_poll_dev = NULL;return -1;}static void __exit poll_exit(void){cdev_del(&g_poll_dev->cdev);device_destroy(g_poll_dev->class, g_poll_dev->devno);unregister_chrdev_region(g_poll_dev->devno, 1);class_destroy(g_poll_dev->class);kfree(g_poll_dev);g_poll_dev = NULL;}module_init(poll_init);module_exit(poll_exit);MODULE_DESCRIPTION("select/poll test");MODULE_AUTHOR("LoyenWang");MODULE_LICENSE("GPL");
测试代码逻辑:
select函数监听,当设值线程设置了count值后,select便会返回;#include <stdio.h>#include <string.h>#include <fcntl.h>#include <pthread.h>#include <errno.h>#include <unistd.h>#include <sys/ioctl.h>#include <sys/stat.h>#include <sys/types.h>#include <sys/time.h>static void *set_count_thread(void *arg){int fd = *(int *)arg;unsigned int count_value = 1;int loop_cnt = 20;int ret;while (loop_cnt--) {ret = ioctl(fd, NOTIFY_SET_COUNT, &count_value);if (ret < 0) {printf("ioctl set count value fail:%s\n", strerror(errno));return NULL;}sleep(1);}return NULL;}int main(void){int fd;int ret;pthread_t setcnt_tid;int loop_cnt = 20;/* for select use */fd_set rfds;struct timeval tv;fd = open("/dev/poll", O_RDWR);if (fd < 0) {printf("/dev/poll open failed: %s\n", strerror(errno));return -1;}/* wait up to five seconds */tv.tv_sec = 5;tv.tv_usec = 0;ret = pthread_create(&setcnt_tid, NULL,set_count_thread, &fd);if (ret < 0) {printf("set_count_thread create fail: %d\n", ret);return -1;}while (loop_cnt--) {FD_ZERO(&rfds);FD_SET(fd, &rfds);ret = select(fd + 1, &rfds, NULL, NULL, &tv);//ret = select(fd + 1, &rfds, NULL, NULL, NULL);if (ret == -1) {perror("select()");break;}else if (ret)printf("Data is available now.\n");else {printf("No data within five seconds.\n");}}ret = pthread_join(setcnt_tid, NULL);if (ret < 0) {printf("set_count_thread join fail.\n");return -1;}close(fd);return 0;}
