


ID:技术让梦想更伟大
整理:李肖遥
使用FreeRTOS,一个最基本的程序架构如下所示:
int main(void)
{
必要的初始化工作;
创建任务1;
创建任务2;
...
vTaskStartScheduler(); /*启动调度器*/
while(1);
}
任务创建完成后,静态变量指针pxCurrentTCB(见《FreeRTOS高级篇2---FreeRTOS任务创建分析》第7节内容)指向优先级最高的就绪任务。
但此时任务并不能运行,因为接下来还有关键的一步:启动FreeRTOS调度器。
调度器是FreeRTOS操作系统的核心,主要负责任务切换,即找出最高优先级的就绪任务,并使之获得CPU运行权。
调度器并非自动运行的,需要人为启动它。
API函数vTaskStartScheduler()用于启动调度器,它会创建一个空闲任务、初始化一些静态变量,最主要的,它会初始化系统节拍定时器并设置好相应的中断,然后启动第一个任务。
这篇文章用于「分析启动调度器的过程」,和上一篇文章一样,启动调度器也涉及到硬件特性(比如系统节拍定时器初始化等)。
本文仍然以Cortex-M3架构为例。
启动调度器的API函数vTaskStartScheduler()的源码精简后如下所示:
void vTaskStartScheduler( void )
{
BaseType_t xReturn;
StaticTask_t *pxIdleTaskTCBBuffer= NULL;
StackType_t *pxIdleTaskStackBuffer= NULL;
uint16_t usIdleTaskStackSize =tskIDLE_STACK_SIZE;
/*如果使用静态内存分配任务堆栈和任务TCB,则需要为空闲任务预先定义好任务内存和任务TCB空间*/
#if(configSUPPORT_STATIC_ALLOCATION == 1 )
{
vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &usIdleTaskStackSize);
}
#endif /*configSUPPORT_STATIC_ALLOCATION */
/* 创建空闲任务,使用最低优先级*/
xReturn =xTaskGenericCreate( prvIdleTask, "IDLE",usIdleTaskStackSize, ( void * ) NULL, ( tskIDLE_PRIORITY | portPRIVILEGE_BIT), &xIdleTaskHandle,pxIdleTaskStackBuffer,pxIdleTaskTCBBuffer, NULL );
if( xReturn == pdPASS )
{
/* 先关闭中断,确保节拍定时器中断不会在调用xPortStartScheduler()时或之前发生.当第一个任务启动时,会重新启动中断*/
portDISABLE_INTERRUPTS();
/* 初始化静态变量 */
xNextTaskUnblockTime = portMAX_DELAY;
xSchedulerRunning = pdTRUE;
xTickCount = ( TickType_t ) 0U;
/* 如果宏configGENERATE_RUN_TIME_STATS被定义,表示使用运行时间统计功能,则下面这个宏必须被定义,用于初始化一个基础定时器/计数器.*/
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS();
/* 设置系统节拍定时器,这与硬件特性相关,因此被放在了移植层.*/
if(xPortStartScheduler() != pdFALSE )
{
/* 如果调度器正确运行,则不会执行到这里,函数也不会返回*/
}
else
{
/* 仅当任务调用API函数xTaskEndScheduler()后,会执行到这里.*/
}
}
else
{
/* 执行到这里表示内核没有启动,可能因为堆栈空间不够 */
configASSERT( xReturn );
}
/* 预防编译器警告*/
( void ) xIdleTaskHandle;
}
这个API函数首先创建一个空闲任务,空闲任务使用最低优先级(0级),空闲任务的任务句柄存放在静态变量xIdleTaskHandle中,可以调用API函数xTaskGetIdleTaskHandle()获得空闲任务句柄。
如果任务创建成功,则关闭中断(调度器启动结束时会再次使能中断的),初始化一些静态变量,然后调用函数xPortStartScheduler()来启动系统节拍定时器并启动第一个任务。
因为设置系统节拍定时器涉及到硬件特性,因此函数xPortStartScheduler()由移植层提供,不同的硬件架构,这个函数的代码也不相同。
对于Cortex-M3架构,函数xPortStartScheduler()的实现如下所示:
BaseType_t xPortStartScheduler( void )
{
#if(configASSERT_DEFINED == 1 )
{
volatile uint32_tulOriginalPriority;
/* 中断优先级寄存器0:IPR0 */
volatile uint8_t * constpucFirstUserPriorityRegister = ( uint8_t * ) (portNVIC_IP_REGISTERS_OFFSET_16 +portFIRST_USER_INTERRUPT_NUMBER );
volatile uint8_tucMaxPriorityValue;
/* 这一大段代码用来确定一个最高ISR优先级,在这个ISR或者更低优先级的ISR中可以安全的调用以FromISR结尾的API函数.*/
/* 保存中断优先级值,因为下面要覆写这个寄存器(IPR0) */
ulOriginalPriority = *pucFirstUserPriorityRegister;
/* 确定有效的优先级位个数. 首先向所有位写1,然后再读出来,由于无效的优先级位读出为0,然后数一数有多少个1,就能知道有多少位优先级.*/
*pucFirstUserPriorityRegister= portMAX_8_BIT_VALUE;
ucMaxPriorityValue = *pucFirstUserPriorityRegister;
/* 冗余代码,用来防止用户不正确的设置RTOS可屏蔽中断优先级值 */
ucMaxSysCallPriority =configMAX_SYSCALL_INTERRUPT_PRIORITY &ucMaxPriorityValue;
/* 计算最大优先级组值 */
ulMaxPRIGROUPValue =portMAX_PRIGROUP_BITS;
while( (ucMaxPriorityValue &portTOP_BIT_OF_BYTE ) ==portTOP_BIT_OF_BYTE )
{
ulMaxPRIGROUPValue--;
ucMaxPriorityValue <<= ( uint8_t ) 0x01;
}
ulMaxPRIGROUPValue <<=portPRIGROUP_SHIFT;
ulMaxPRIGROUPValue &=portPRIORITY_GROUP_MASK;
/* 将IPR0寄存器的值复原*/
*pucFirstUserPriorityRegister= ulOriginalPriority;
}
#endif /*conifgASSERT_DEFINED */
/* 将PendSV和SysTick中断设置为最低优先级*/
portNVIC_SYSPRI2_REG |=portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |=portNVIC_SYSTICK_PRI;
/* 启动系统节拍定时器,即SysTick定时器,初始化中断周期并使能定时器*/
vPortSetupTimerInterrupt();
/* 初始化临界区嵌套计数器 */
uxCriticalNesting = 0;
/* 启动第一个任务 */
prvStartFirstTask();
/* 永远不会到这里! */
return 0;
}
从源码中可以看到,开始的一大段都是冗余代码。
因为Cortex-M3的中断优先级有些违反直觉:Cortex-M3中断优先级数值越大,表示优先级越低。
而FreeRTOS的任务优先级则与之相反:优先级数值越大的任务,优先级越高。
根据官方统计,在Cortex-M3硬件上使用FreeRTOS,绝大多数的问题都出在优先级设置不正确上。
因此,为了使FreeRTOS更健壮,FreeRTOS的作者在编写Cortex-M3架构移植层代码时,特意增加了冗余代码。
关于详细的Cortex-M3架构中断优先级设置,参考《FreeRTOS系列第7篇---Cortex-M内核使用FreeRTOS特别注意事项》一文。
在Cortex-M3架构中,FreeRTOS为了任务启动和任务切换使用了「三个异常」:SVC、PendSV和SysTick。
「SVC」(系统服务调用)用于任务启动,有些操作系统不允许应用程序直接访问硬件,而是通过提供一些系统服务函数,通过SVC来调用;
「PendSV」(可挂起系统调用)用于完成任务切换,它的最大特性是如果当前有优先级比它高的中断在运行,PendSV会推迟执行,直到高优先级中断执行完毕;
「SysTick」用于产生系统节拍时钟,提供一个时间片,如果多个任务共享同一个优先级,则每次SysTick中断,下一个任务将获得一个时间片。
关于详细的SVC、PendSV异常描述,推荐《Cortex-M3权威指南》一书的“异常”部分。
这里将PendSV和SysTick异常优先级设置为最低,这样任务切换不会打断某个中断服务程序,中断服务程序也不会被延迟,这样简化了设计,有利于系统稳定。
接下来调用函数vPortSetupTimerInterrupt()设置SysTick定时器中断周期并使能定时器运行这个函数比较简单,就是设置SysTick硬件的相应寄存器。
再接下来有一个关键的函数是prvStartFirstTask(),这个函数用来启动第一个任务。我们先看一下源码:
__asm void prvStartFirstTask( void )
{
PRESERVE8
/* Cortext-M3硬件中,0xE000ED08地址处为VTOR(向量表偏移量)寄存器,存储向量表起始地址*/
ldr r0, =0xE000ED08
ldr r0, [r0]
/* 取出向量表中的第一项,向量表第一项存储主堆栈指针MSP的初始值*/
ldr r0, [r0]
/* 将堆栈地址存入主堆栈指针 */
msr msp, r0
/* 使能全局中断*/
cpsie i
cpsie f
dsb
isb
/* 调用SVC启动第一个任务 */
svc 0
nop
nop
}
程序开始的几行代码用来复位主堆栈指针MSP的值,表示从此以后MSP指针被FreeRTOS接管,需要注意的是,Cortex-M3硬件的中断也使用MSP指针。
之后使能中断,使用汇编指令svc 0触发SVC中断,完成启动第一个任务的工作。我们看一下SVC中断服务函数:
__asm void vPortSVCHandler( void )
{
PRESERVE8
ldr r3, =pxCurrentTCB /* pxCurrentTCB指向处于最高优先级的就绪任务TCB */
ldr r1, [r3] /* 获取任务TCB地址 */
ldr r0, [r1] /* 获取任务TCB的第一个成员,即当前堆栈栈顶pxTopOfStack */
ldmia r0!, {r4-r11} /* 出栈,将寄存器r4~r11出栈 */
msr psp, r0 /* 最新的栈顶指针赋给线程堆栈指针PSP */
isb
mov r0, #0
msr basepri, r0
orrr14, #0xd /* 这里0x0d表示:返回后进入线程模式,从进程堆栈中做出栈操作,返回Thumb状态*/
bx r14
}
通过上一篇介绍任务创建的文章,我们已经认识了指针pxCurrentTCB。
这是定义在tasks.c中的唯一一个全局变量,指向处于最高优先级的就绪任务TCB。
我们知道「FreeRTOS的核心功能」是确保处于最高优先级的就绪任务获得CPU权限,因此可以说这个指针指向的任务要么正在运行中,要么即将运行(调度器关闭),所以这个变量才被命名为pxCurrentTCB。
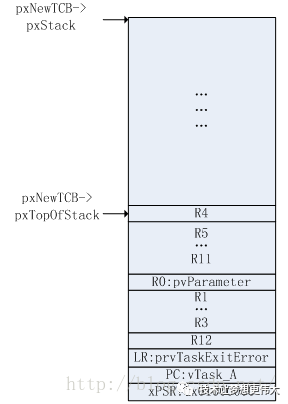
根据《FreeRTOS高级篇2---FreeRTOS任务创建分析》第三节我们可以知道,一个任务创建时,会将它的任务堆栈初始化的像是经过一次任务切换一样,如图1-1所示。
对于Cortex-M3架构,需要依次入栈xPSR、PC、LR、R12、R3~R0、R11~R4,其中r11~R4需要人为入栈,其它寄存器由硬件自动入栈。
寄存器PC被初始化为任务函数指针vTask_A,这样当某次任务切换后,任务A获得CPU控制权,任务函数vTask_A被出栈到PC寄存器,之后会执行任务A的代码;
LR寄存器初始化为函数指针prvTaskExitError,这是由移植层提供的一个出错处理函数。
任务TCB结构体成员pxTopOfStack表示当前堆栈的栈顶,它指向最后一个入栈的项目,所以在图中它指向R4;
TCB结构体另外一个成员pxStack表示堆栈的起始位置,所以在图中它指向堆栈的最开始处。
所以,SVC中断服务函数一开始就使用全局指针pxCurrentTCB获得第一个要启动的任务TCB,从而获得任务的当前堆栈栈顶指针。
先将人为入栈的寄存器R4~R11出栈,将最新的堆栈栈顶指针赋值给线程堆栈指针PSP,再取消中断掩蔽。
到这里,只要发生中断,就都能够被响应了。
中断服务函数通过下面两句汇编返回。
Cortex-M3架构中,r14的值决定了从异常返回的模式,这里r14最后四位按位或上0x0d,表示返回时从进程堆栈中做出栈操作、返回后进入线程模式、返回Thumb状态。
orr r14, #0xd
bx r14
执行bx r14指令后,硬件自动将寄存器xPSR、PC、LR、R12、R3~R0出栈,这时任务A的任务函数指针vTask_A会出栈到PC指针中,从而开始执行任务A。
至此,任务vTask_A获得CPU执行权,调度器正式开始工作。
嵌入式编程专辑 Linux 学习专辑 C/C++编程专辑
Qt进阶学习专辑
关注我的微信公众号,回复“加群”按规则加入技术交流群。
这是我另一个技术号,程序员的编程学习基地,注重编程思想,欢迎关注!
点击“阅读原文”查看更多分享。
