冯·诺依曼体系结构图如下
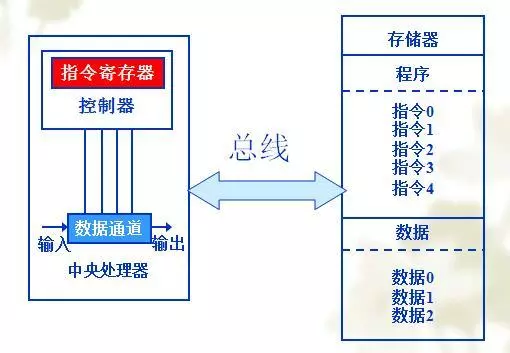
冯·诺依曼体系的特点:
A、数据与指令都存储在同一存储区中,取指令与取数据利用同一数据总线。
B、被早期大多数计算机所采用。
C、ARM7——冯诺依曼体系结构简单,但速度较慢。取指不能同时取数据
冯.诺依曼结构处理器具有以下几个特点:
1:必须有一个存储器;
哈佛体系结构图
结构特点:
A、程序存储器与数据存储器分开.
B、提供了较大的存储器带宽,各自有自己的总线。
C、适合于数字信号处理.
D、大多数DSP都是哈佛结构.
E、ARM9是哈佛结构,取指和取数在同一周期进行,提高速度,改进哈佛体系结构分成三个存储区:程序、数据、程序和数据共用。
哈佛结构是一种存储器并行体系结构,主要特点是将程序和数据存储在不同的存储空间中,即程序存储器和数据存储器是两个独立的存储器,每个存储器独立编址、独立访问。程序指令存储和数据存储分开,可以使指令和数据有不同的数据宽度。
哈佛结构能基本上解决取指和取数的冲突问题.而对另一个操作数的访问,就只能采用Enhanced哈佛结构了,例如像TI那样,数据区再split,并多一组总线.或向AD那样,采用指令cache,指令区可存放一部分数据.。
哈佛结构:
1、ARM(除arm7)
2、大部分DSP
哈佛体系架构有个致命的弱点在动态加载程序上面,想象我们从外存中读取一段程序然后加载到RAM,这个程序是在数据内存当中的,我们需要一种机制将数据内存再传输到程序内存当中去,这反而增加了设备复杂度。
对于多任务操作系统来说,管理程序内存是一件非常重要的事情,而且仅仅是保护模式下的页面映射等等机制就已经足够复杂了,如果还要求将程序和数据分开管理,复杂度就太高了。这种时候冯诺依曼体系结构就有非常大的优势了。
哈佛架构是针对cpu从cache中取指而言,指令和数据在主存中并未分开,但在加载到cache中的时候被分离为指令和数据两份存储空间,cpu可以同时从cache取到指令和数据.
所以arm系统CPU(除arm7)对外表现为冯.诺伊曼架构,对内则表现为哈佛架构。
实际上,绝大多数现代计算机使用的是所谓的“ModifiedHarvard Architecture”,指令和数据共享同一个address space,但缓存是分开的。可以说是两种架构的一种折中吧。
在现实世界中很少有非常纯粹的概念,特别是在实际的应用里。教科书里的大多是理想化的模型,便于掌握某个概念的重点和本质,但实际中很难达到这种理想化的状态。
哈佛结构和冯诺依曼结构主要区别在是否区分指令与数据。在教科书里这是两种截然不同的做法。
但实际上在内存里,指令和数据是在一起的。而在CPU内的缓存中,还是会区分指令缓存和数据缓存,最终执行的时候,指令和数据是从两个不同的地方出来的。你可以理解为在CPU外部,采用的是冯诺依曼模型,而在CPU内部用的是哈佛结构。
大部分的DSP都没有缓存,因而直接就是哈佛结构。
哈佛结构设计复杂,但效率高。冯诺依曼结构则比较简单,但也比较慢。CPU厂商为了提高处理速度,在CPU内增加了高速缓存。也基于同样的目的,区分了指令缓存和数据缓存。有时为了解决现实问题,究竟是什么主义真的没那么重要。因而个人认为争论到底是哪种结构意义不大。
