作者:Jeff Watson(ADI公司应用工程师)
摘要
越来越多的应用需要从处于高温环境中的传感器收集数据。近年来,半导体、无源器件和互连领域取得了很大进展,使得高精度数据采集和处理成为可能。但是,人们需要能够在175°C高温条件下运行的传感器,尤其是采用微机电系统(MEMS)提供的易于使用的传感器,这一需求尚未得到满足。相比同等的分立式传感器,MEMS通常更小巧,功耗和成本都更低。此外,它们还可以在同样大小的半导体封装内集成信号调理电路。
目前已发布高温MEMS加速度计ADXL206,它可以提供高精度倾斜(倾角)测量。但是,还需要更加灵活和自由,以准确测量系统在严苛环境应用下的移动,在这些环境下,最终产品可能遭受冲击、振动和剧烈移动。这种类型的滥用会导致系统过度磨损和提前出现故障,由此产生高额的维护或停机成本。
为了满足这一需求,ADI公司新开发了一款集成信号调理功能的高温MEMS陀螺仪,即ADXRS645。此传感器即使在冲击和振动环境下也能实现准确的角速率(转速)测量,且额定工作温度高达175°C。
工作原理
MEMS陀螺仪利用科氏加速度来测量角速率。关于科氏效应的解释,从图1开始。设想自己站在一个旋转平台上,站在靠近中心的位置。您相对于地面的速度以蓝色箭头的长度来显示。如果您移动到靠近平台外缘的位置,您相对于地面的速度会加快,具体由更长的蓝色箭头表示。由径向速度引起的切向速度的增长率,就是科氏加速度。
如果Ω表示角速率,r表示半径,切向速度即为Ωr。所以,如果在速度为v时,r改变,则会产生切向加速度Ωv。其值是科氏加速度的一半。另一半来自径向速度方向的改变,总共为2Ωv。如果您施加质量体(M),那么平台必须施加力—2MΩv—来产生这种加速度,那么质量体也会经受对应的反作用力。ADXRS645通过使用与人在旋转平台上向中心和向外缘移动时对应的谐振质量体来利用这种效应。质量体是采用多晶硅,通过微机械加工而成,并粘接在多晶硅框架上,所以它只能沿一个方向谐振。
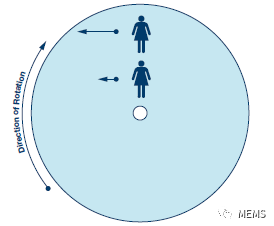
图1 科氏加速度示例。人员向北移动到旋转平台的外缘时,必须增大向西的速度分量(蓝色箭头),以保持向北移动的路线。所需的加速度就是科氏加速度。
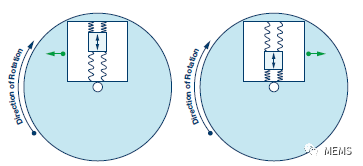
图2 科氏效应演示:响应悬挂在框架内的硅质量体的谐振。绿色箭头表示结构受到的力(基于谐振质量体的状态)。
图2显示,当谐振质量体向旋转平台的外缘移动时,它向右加速,并向左对框架施加一个反作用力。当它向旋转中心移动时,它向右施加一个力,如绿色箭头所示。
为了测量科氏加速度,我们使用与谐振运动方向呈90°的弹簧,将包含谐振质量体的框架连接到衬底上,具体如图3所示。此图还显示了科氏检测指针,它通过电容转导,在受到施加给质量体的力影响时检测框架的位移。
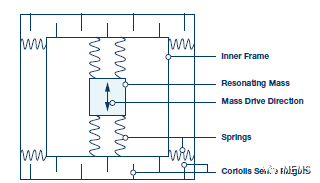
图3 该陀螺仪的机械架构原理图。
图4显示完整的结构,从中可以看出,当谐振质量体移动,陀螺仪所在的安装平面旋转时,质量体和其框架会受到科氏加速度影响,并因为振动旋转90°。随着转速加快,质量体的位置和从对应的电容获取的信号发生改变。需要注意的是,陀螺仪可以按任意角度放置在旋转物体的任意位置,只要它的检测轴与旋转轴平行即可。
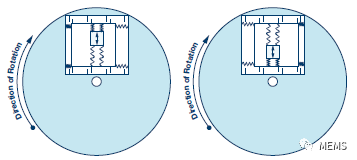
图4 框架和谐振质量体受科氏效应影响,产生横向位移。
电容检测
ADXRS645通过附加在谐振器上的电容传感元件来测量谐振质量体和框架因科氏效应产生的位移,具体如图4所示。这些元件都是硅棒,与衬底上连接的两组固定硅棒交错,形成两个名义上相等的电容。角速率引起的位移会在系统中产生差分电容。
在实际应用中,科氏加速度是一个极小的信号,会导致几分之一埃的射束偏转,以及仄法级别的电容变化(译者注:1仄法=1e-21法拉)。因此,最大限度降低对寄生源(例如温度、封装应力、外部加速度和电噪声)的相互干扰是极为重要的。这种作用一部分是通过将电子器件(包括放大器和滤波器)和机械传感器放置在同一裸片上来实现的。但是,更重要的是在信号链中距离尽可能远的位置实施差分测量,并将信号与谐振器速度关联起来,尤其是在处理外部加速度产生的影响时。
振动抑制
理想情况下,陀螺仪只对转速敏感,对其他东西都不敏感。在实际应用中,由于陀螺仪的机械设计不对称,且/或微加工精度不够,所有陀螺仪都对加速度有一定的敏感性。事实上,加速度灵敏度有多种表现形式——其严重程度因设计而异。最为严重的通常要属对线性加速度的灵敏度(或g灵敏度)和振动整流的灵敏度(或g2灵敏度),严重到足以完全抵消该器件的额定偏置稳定性。当速率输入量超过额定测量范围时,有些陀螺仪轨与轨之间的输出会存在差异。其他陀螺仪在受到低至几百g的冲击时,会倾向于锁死。这些陀螺仪不会受到冲击损坏,但是也无法再对速率做出响应,需要进行重启。
ADXRS645采用了一种新颖的角速率检测方法,使其能够抑制高达1000 g的冲击。它使用四个谐振器对信号实施差分检测,并抑制与角移动无关的共模外部加速度。图5顶部和底部的谐振器彼此独立,并且是反相操作的。所以,它们测量的旋转幅度相同,但输出方向相反。因此,利用传感器信号之间的差值来测量角速率。如此可以消除对两个传感器造成影响的非旋转信号。信号在前置放大器前面的内部硬连线中组合。因此,会在很大程度上防止极端加速过载到达电子器件,从而使得信号调理能在受到大型冲击时保持角速率输出。
图5 四通道差分传感器设计。
传感器安装
图6所示为陀螺仪、相关的驱动和检测电路的简化原理图。
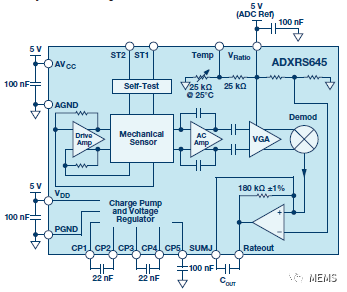
图6 集成式陀螺仪的框图。
谐振器电路检测谐振质量体的速度,进行放大,并驱动谐振器,同时相对于科氏信号路径保持一个控制良好的相位(或延迟)。科氏电路被用于检测加速度计框架的移动,利用下游信号处理来提取科氏加速度的幅度,并生成与输入转速一致的输出信号。此外,自检功能会检查整个信号链(包括传感器)的完整性。
应用示例
对于电子设备来说,最严苛的使用环境莫过于石油和天然气的井下钻井行业。这些系统利用大量传感器来更好地了解钻柱在地表下的运行状况,以优化操作并防止造成损坏。钻机的转速以RPM为单位测量,是钻机操作员时刻需要掌握的一个关键指标。以前,这个指标由磁力计计算得出。但是,磁力计容易受到钻机套管和周围井眼中的铁质材料影响。它们还必须采用特殊的无磁性钻环(外壳)。
除了简单的RPM测量之外,人们越来越热衷于了解钻柱的移动(或钻柱动态),以更好地管理施加的力的大小、转速和转向等参数。钻柱动态如果管理不善,可能导致钻柱高度振动和出现极不稳定的移动,这会导致目标区域的钻井时间延长、设备过早故障、钻头转向困难,且会对钻井本身造成损坏。在极端情况下,设备可能断裂并残留在钻井中,之后需要支付极高的成本才能取回。
因钻柱参数管理不善会导致一种特别有害的移动,即粘滑。粘滑是指钻头卡住,但钻柱顶部继续旋转的现象。钻头被卡住后,钻柱底部持续转动收紧,直到达到足够扭矩,造成断裂和松脱,这种断裂通常非常剧烈。发生这种情况时,钻头上会出现按转速旋转的大尖峰。粘滑一般周期性发生,可以持续很长一段时间。对粘滑的典型RPM响应如图7所示。由于地表的钻柱继续正常运行,钻机操作员通常无法意识到,井下正在发生这种非常具有破坏性的现象。
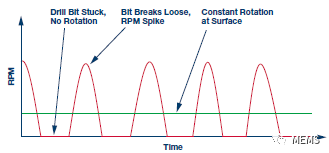
图7 粘滑循环RPM剖面图示例。
在这种应用中,一个关键的测量方法是准确、频繁地测量钻头附近的转速。陀螺仪(例如具有振动抑制效果的ADXRS645)非常适合执行这项任务,因为其测量不受钻柱的线性移动影响。在出现高度振动和不稳定移动时,磁力仪计算得出的转速易受噪声和误差影响。基于陀螺仪的解决方案能够即时测量得出转速,且不使用易受冲击和振动影响的过零或其他算法。
此外,相比磁通磁力计解决方案,基于陀螺仪的电路体积更小,需要的元器件数量更少,而前者需要多个磁力计轴和额外的驱动电路。ADXRS645中集成了信号调理功能。此器件采用低功耗、低引脚数封装,支持高温IC对陀螺仪模拟输出采样并将其数字化。采用图8中所示的简化信号链,可以实现提供数字输出、额定温度为175°C的陀螺仪电路。关于数据采集电路的完整参考设计,请访问www.analog.com/cn0365。
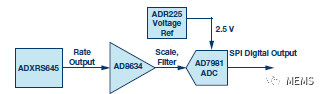
图8 额定温度为175°C的陀螺仪数字输出信号链。
总结
本文介绍了首款可在175°C高温环境下使用的MEMS陀螺仪——ADXRS645。此传感器能在恶劣的环境应用中准确测量角速率,防止冲击和振动造成影响。此陀螺仪由一系列高温IC提供支持,以获取信号并进行处理。如需了解关于ADI高温产品的更多信息,请访问www.analog.com/hightemp。
作者简介
Jeff Watson是ADI公司仪器仪表、航空航天与国防事业部的系统应用工程师,致力于高温应用。加入ADI公司之前,他是地下石油和天然气仪器仪表行业以及非公路用车仪器仪表/控制行业的一名设计工程师。他拥有宾州州立大学的电气工程学士和硕士学位。

