

自然、便捷、人性化的交互方式是工业和学术领域都在探索和研究的方向,相比于鼠标、操纵杆、按键等交互形式,人体的肢体动作被认为是一种直观的交互方式。基于人体动作捕获和识别的人机交互可以提供一种自然、直观、高效的人机交互方式。这种交互方式直接以人体动作作为输入,通过对人体动作的识别,实现人与机器之间的信息交流。
动作捕捉系统的兴起和发展在许多应用领域得到了广泛的应用,下面是动作捕捉系统在人体生物力学、体育运动领域和娱乐应用领域实例。
一、应用研究实例
1.人体生物力学研究实例
(图源:sportlab.com.cn)
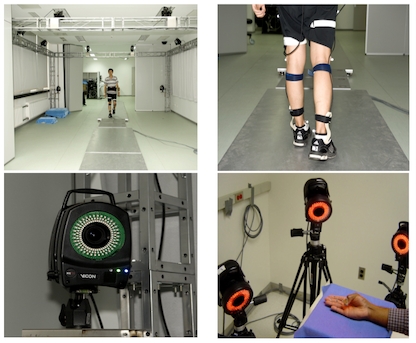
人类工效学实验室隶属于中国标准化研究院实验中心。实验室始建于1980年,主要致力于工效学基础应用研究和工效学标准化研究。人类工效学领域有8大实验平台,分别是可用性与人机交互实验平台、人体测量实验平台、生物力学实验平台、环境功效学实验平台、虚拟现实与仿真实验平台、神经工效学实验平台、认知工效学实验平台、感知工效学实验平台。
其中,生物力学实验平台针对人们日常工作和生活中存在的人体力学问题,运用力量测试、动作捕捉、压力测试、动作模拟、表面肌电、多导生理、心肺测试等技术手段和方法,开展人体生物力学特性、工作能力与人机力学匹配性、生物力学模型创建等研究。
实验室采用了动作捕捉系统,用以产品评估和分析,采集了大样本人体力量数据,建立了中国人体操控力数据库,提升我国产品操控舒适性,保障劳动健康安全。
2.体育运动实例

(图源:https://mp.weixin.qq.com/s/-5qzvukb2Fmtbog2ap2-9g)
SkiMittelschule Windischgarsten(SMS)机构位于奥地利,是一个专门培养青少年冬季运动员的培训和学习机构。它的室内滑雪训练室,拥有一个特制履带的滑雪跑台模拟器,能让运动员全年进行训练。
为了观察和改善运动员的训练,SMS使用动作捕捉技术,研究结果不仅用于开发和改善SMS运动员的训练,也用于评估高山滑雪的动作技术参数的算法验证,比如分段或者滑雪方向、评估“重力”、质心轨迹、负载量化、疲劳监测等其它参数。
3.娱乐应用实例
(图源:百度百科)
影视动画制作是最早使用人体动作捕获技术的领域之一。在传统的影视动画制作中,设计人员需要根据人物的动作,逐帧设计每一个肢体的运动轨迹,最后再合成动画。为了使人物的动作看起来更加流畅、真实、自然,设计人员需要反复迭代,从而增加了制作周期和成本。人体动作捕获技术的出现则颠覆性地改变了传统影视动画的制作方式。在影视动作制作过程中,特效演员只需要根据影视动画中的情节设计做出各种动作,人体动作捕获系统可以将表
演者的每个动作都捕获和记录下来。这种创作方式可以最大限度保留演员的精湛表演技能,使动画人物的动作更加逼真,为观众带来更好的视觉体验,例如《阿凡达》等电影都使用动作捕捉技术。
二.姿态表示
人体运动学模型是人体动作捕获、重构和分析的基础。人体的运动是一个及其复杂的过程,在对人体结构和运动特征进行分析的过程中,需要将人体简化为由若干个关节和骨骼所组成的层次关节链骨骼模型。在人体姿态运动学中,需要对人体姿态进行表示。
姿态用于描述两个坐标系在三维空间中的相对方位关系。姿态描述是人体姿态运动学的基础,以下分别介绍三种常用的姿态参数化描述方法:旋转矩阵、欧拉角和四元数,三种表示方法之间可以互相转化。
1.欧拉角法
在对传感器终端载体进行姿态描述过程中,可以选用角度来表示姿态信息即欧拉角。欧拉角最先是由欧拉提出来的,欧拉角由横滚角、俯仰角和航向角组成。欧拉角将刚体在三维空间中的旋转分解为绕三个特定坐标轴的顺序旋转,三次旋转角即为欧拉角。
根据旋转轴和旋转顺序的不同,欧拉角有两种定义方法。一种是三次旋转均以固联于刚体的坐标系为旋转轴,另一种是三次旋转均以参考系的坐标轴为旋转轴。按照旋转顺序的不同,一共有24种不同的欧拉角。欧拉角具有一定的范围,横滚角的范围是(-180°,180°),俯仰角的范围是(-90°,90°),航向角范围是(-180°,180°)。
将载体坐标系的数据转化到导航坐标系时,用欧拉角表示这种转换过程,转换过程可以按照“航向角一俯仰角一横滚角”的转换顺序表示。
欧拉角具有形式简洁物理意义明确等优点,没有冗余参数,在计算时也无需正交化处理,是姿态描述的最小实现。但是,欧拉角有一个致命的问题,当俯仰角趋近±90度时,滚转角和俯仰角在同一平面转动,因此损失一个自由度,这就是所谓的万向锁死现象。因此,欧拉角只能适用于俯仰角在±90度内变化,不能用于全姿态描述。欧拉角微分方程含有大量的三角函数,计算量大。此外,欧拉角不能直接进行插值(等量的欧拉角变换可能引起完全不同的旋转变换),在进行坐标转换计算时,通常需要将欧拉角转完成其他表示形式,例如旋转矩阵,会增大计算量。
2.方向余弦法
方向余弦矩阵是一个由九个元素组成的三阶方阵,可称为旋转矩阵。方向余弦中的九个元素可以通过载体坐标系下的三轴角速度数据计算得到。
旋转矩阵可以用于同一点在不同坐标系之间的坐标变换。假设q点在Fb坐标系中的坐标为,则q点在Fe坐标系中坐标为:。
通过矩阵的相乘可以实现旋转组合,从而形成新的旋转矩阵。如果坐标系C相对于坐标系 B 的旋转矩阵为,坐标系B相对于坐标系A的旋转矩阵为,那么坐标系C相对于坐标系A的旋转矩阵为:
旋转矩阵可以实现全姿态描述,但是其描述不直观。由于方向余弦法不存在奇异现象,因此可以用于全姿态测量实验。与欧拉角法相比,方向余弦法虽然不具有欧拉角存在的奇异性问题,旋转矩阵需要九个变量,这些变量并不是相互独立的,存在冗余,在计算过程中需要占用较多的存储空间,计算量巨大,在实际工程应用中比较少。矩阵不能被直接插值,因此无法胜任运动合成和重用等应用,仅适用于少数场合。
3.四元数法
四元数是超复数,利用复数的形式来描述空间姿态。相对于欧拉角,四元数没有奇异点,可以实现全姿态描述,并且运算过程中不会涉及到大量的三角函数运算。相对于旋转矩阵,四元数没有冗余变量,具有占用内存空间少、计算效率高的优点。此外,四元数还有具有欧拉角和旋转矩阵所没有的优点:便于平滑和插值,在运动合成和重用领域具有重要的作用。得益于上述有点,四元数广泛应用于姿态解算、姿态控制和计算机动画等领域。
在姿态描述过程中,将传感器终端采集到的传感器数据转化为四元数。将四元数表示成由,,,四个参数组成的复数形式,如下所示。
其中,为实部,,,为虚部。
在利用四元数乘法进行坐标变换时,需要将三维向量扩展成四维,即扩展为是标量为零的四元数,。在很多有关四元数乘法的描述中,是将三维向量均看作是标量为零的四元数。
人体姿态分析流程
运动学和约束:许多身体运动跟踪的技术都假定人的肢体是刚体。因此,从运动学的角度来看,动作捕捉系统简化确定这些肢体的姿势和位置。
当涉及更多的肢体时,可以对人体运动链进行建模。在分别估算每个肢体的姿态之后,第一个多肢模型在第二步中使用了该运动学链,但是,通过提供可以添加到传感器融合算法中的联合约束条件,可以更好地利用运动学链,从而使估算结果与人体运动更加一致。
2.传感器融合技术:对于惯性动作捕捉系统,从加速度计,陀螺仪,磁力计和其他传感器收集的信号需要合适的传感器融合技术,以获取有关四肢的姿势和姿势的有用信息。
在大多数传感器融合方法中,未知变量(例如,欧拉角)是基于先前的时间步长估计和当前的时间步长度量在连续时间步长的离散设置中估计的。传感器融合采用了两种主要方法:互补滤波器和卡尔曼滤波器。更复杂的方法包括粒子过滤器和基于优化的方法,这些方法现在适用于在线动作捕捉系统。
3.校准标定研究
在将传感器安装到身体上之后,它们需要两个以上的校准步骤,并且至少需要进行一次旋转,其中旋转轴被假定为解剖体段的轴。旋转在由两个解剖轴定义的平面中进行。此外,在校准过程中需要一些设备。
下面举例说明几种商业动作捕捉系统的校准标定过程。
(1) 使用诺亦腾公司的惯性产品时,用户需要根据指示进行相应的校准动作。

(图源:诺亦腾)
Steady-pose校准:保持坐姿,双手放在桌子上。如果你很难在校准过程中保持静止的话,也可以把手套部位。脱下来放在平面上。校准倒计时过程中演员要保持静止不动。
A-pose校准:双脚保持位置不变,重心不变,双手垂直向下,上臂向内收紧,校准倒计时过程中演员要保持静止不动。
T-pose校准:站立成标准T字,两脚略微分开垂直于胯骨,重心落在脚后跟,双手伸直于身体两侧,与肩平行,两手抬平在弯肘时能位于胸前,略收下颚,目视前方,注意不要耸肩。
S-pose校准:双脚保持位置不变,屈膝向前,两膝盖朝正前方。
(2)Xsens:用户在使用Xsens MVN,相较于诺亦腾静态姿势校准,XsensMVN中采样动态校准。用户被推荐使用N-Pose姿势进行校正,穿戴者笔直站立2.5秒后,再和软件中人偶保持相同的步伐,向前走7步,再回头走回原点,并保持眼睛直视前方不动,等待进度条加载完成。

(图源:Xsens)
(3)NOKOV光学动作捕捉系统:一套光学动作捕捉系统由红外动作捕捉镜头、反光标识点、POE连接器、动作捕捉软件和若干配件组成(如标定工具和镜头云台等)。其工作原理是:通过镜头发射红外线,红外线照射到标识点上会被反射,镜头上的感应矩阵可接收到反射回来的红外线,两个镜头同时工作,就可以确定标识点在三维空间内的坐标;大量坐标数据通过POE连接器传输给动作捕捉软件,便可以解算出目标在空间中的位置、方向和运动轨迹等信息,实现对目标的追踪。

(图源:NOKOV)
在实际应用中,目标身上的部分标记点有被遮挡住的可能,因此一套光学动作捕捉系统会配备多个镜头。校准的过程就是使用标定工具,让动作捕捉软件计算出镜头的准确空间位置和角度,建立三维空间坐标,为精确的动作捕捉做好准备。
与欧美国家相比,我国动作捕捉系统行业还处于发展初期,发展前景广阔。未来随着动作捕捉系统行业技术水平的不断提高,动捕技术在我国将会应用到更多的领域,应用领域的拓展也将进一步扩大产品的市场需
作者:凌霄
浙江大学机械电子专业博士,从事智能传感与人机交互,智能机器人控制等领域的研究

免责声明:本文版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。


为您发布产品,请点击“阅读原文”
