前言
在汽车电子ECU开发中,有一个不得不提的概念就是功能安全,对于从事汽车电子软件开发的工程师而言,功能安全等级的高低决定了设计开发ECU的水平,同时对于功能安全开发的标准ISO26262,也从各个阶段定义了汽车电子ECU开发的规范,今天所介绍的模块是一个和功能安全密切相关的模块,是ISO26262中对功能安全中的Timing的监控保护机制相关的模块。
1、ISO26262对Timing的要求

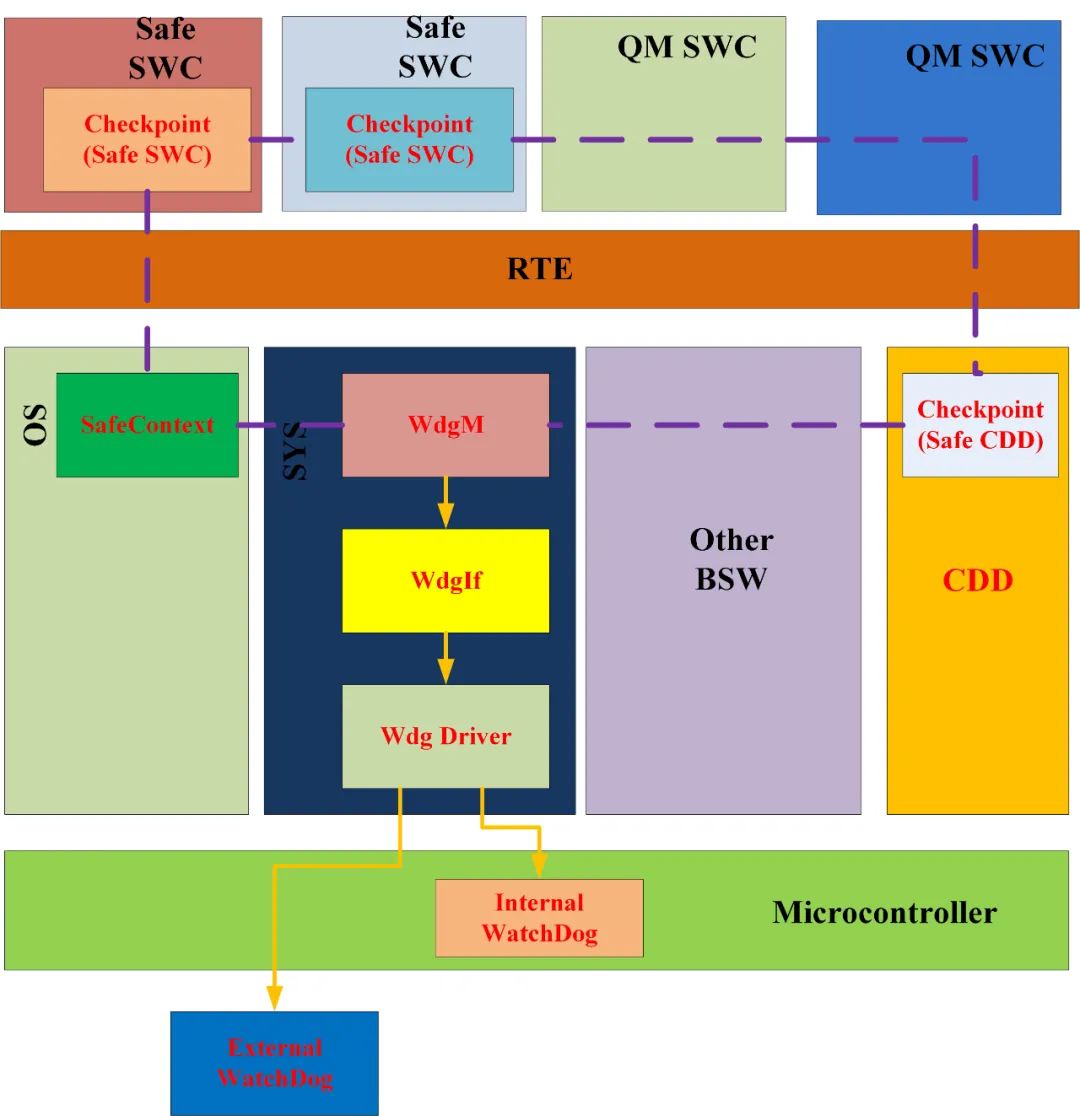
2、WdgM功能Overview
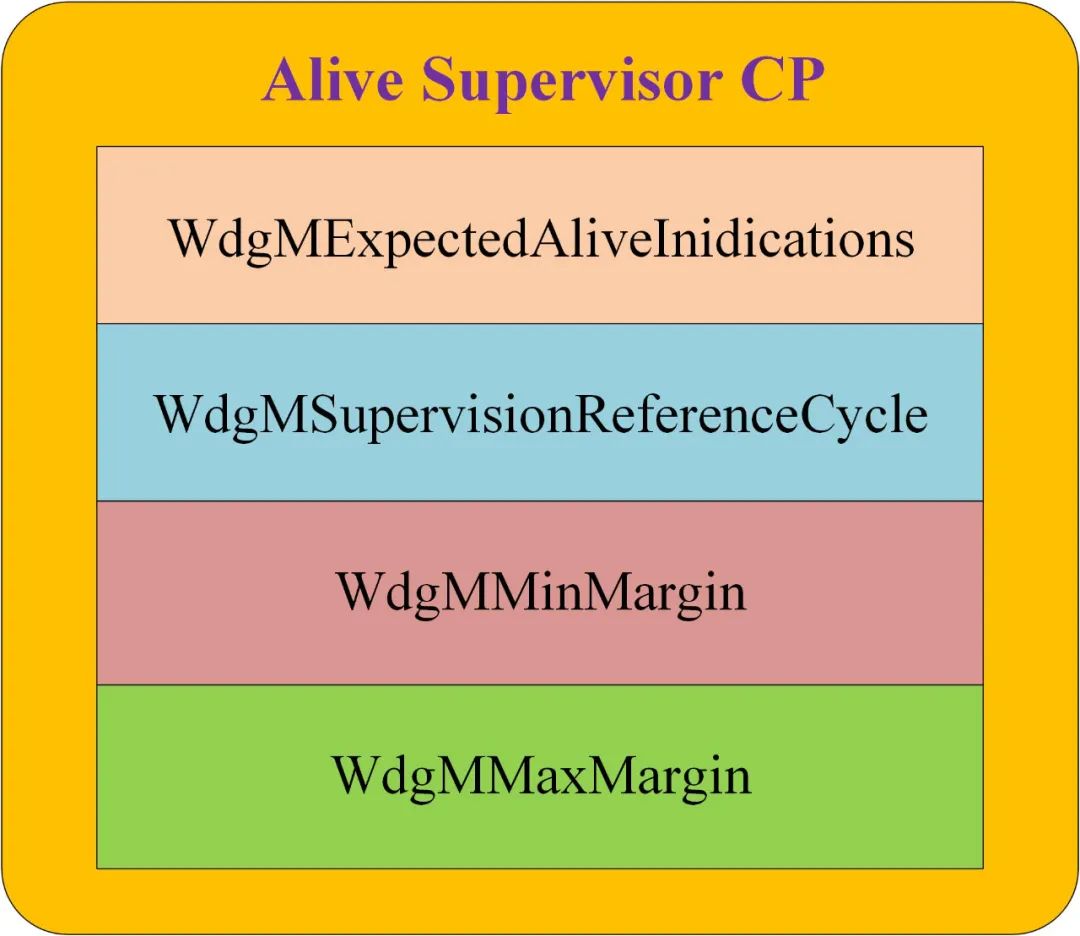
3、Alive Supervision
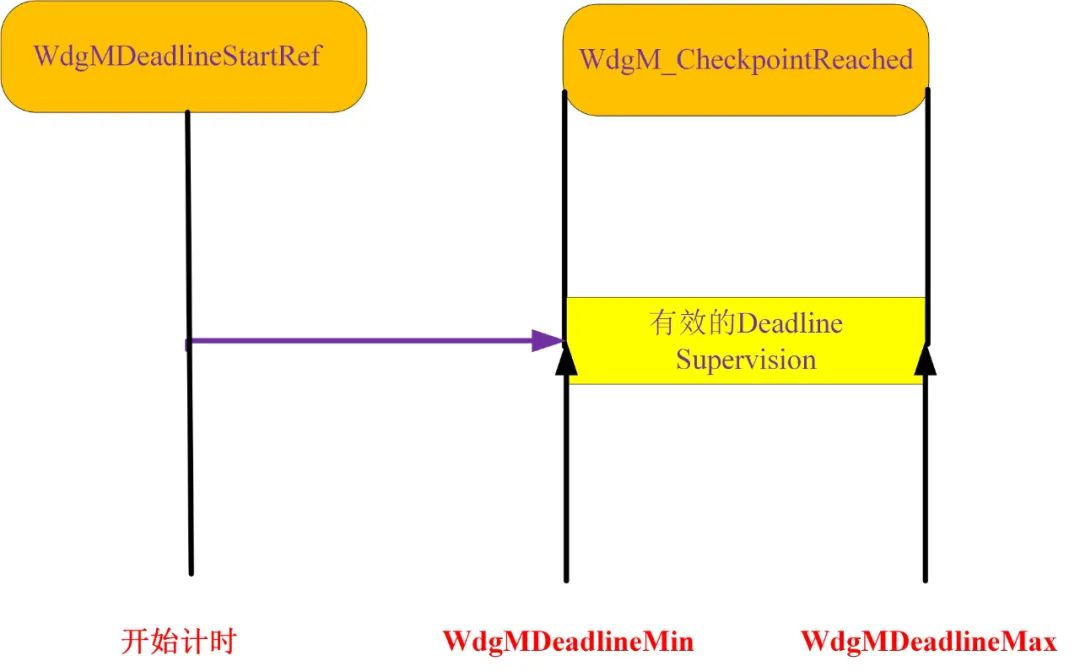
4、Deadline Supervision
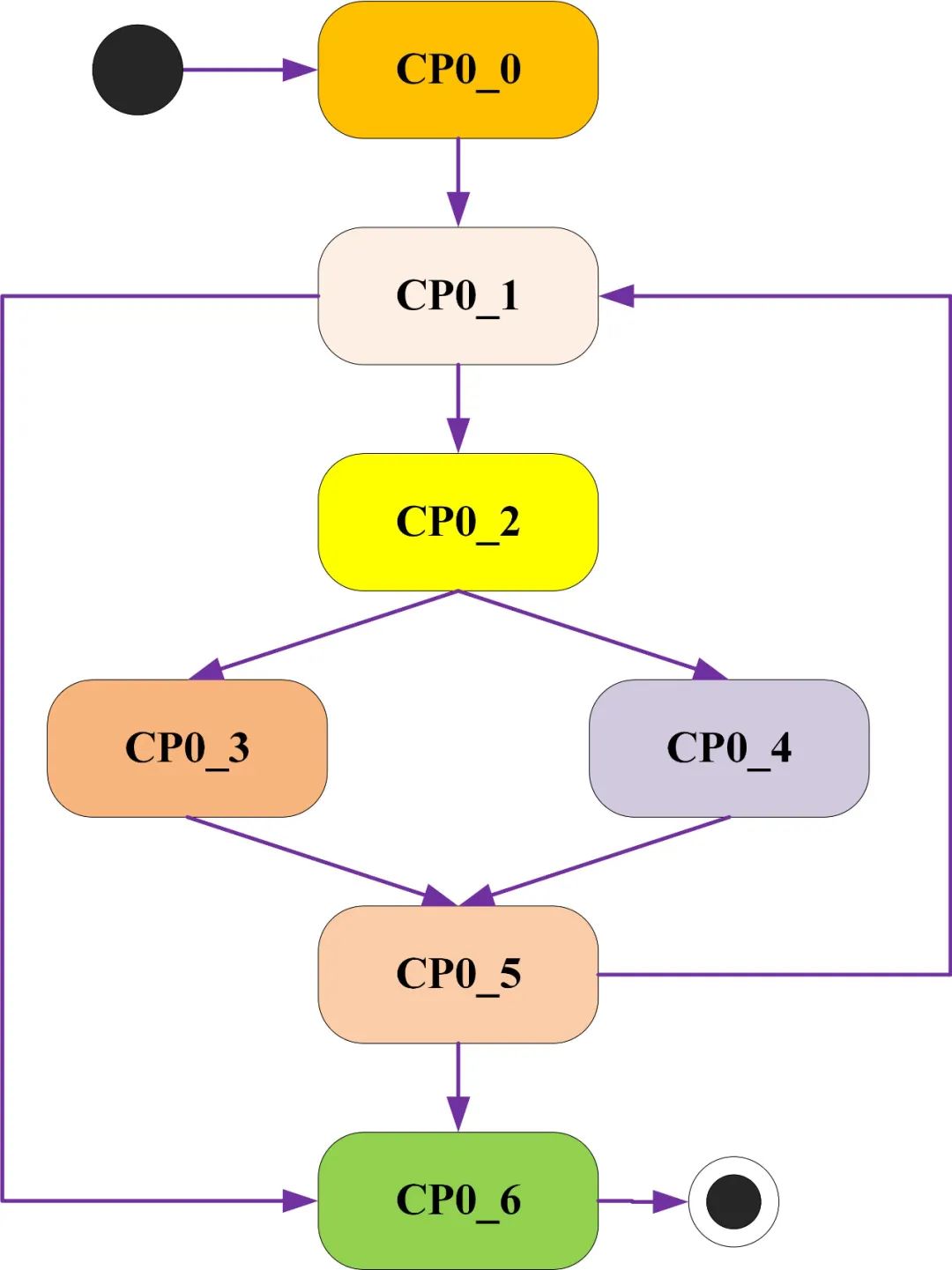
5、Logical Supervision
CP0_0 i = 0;CP0_1 while(i < n){CP0_2 if (a[i] < b[i])CP0_3 a[i] = b[i];CP0_4 elsea[i] = 0;CP0_5 i++;CP0_6 }
6、Local Status & Global Status
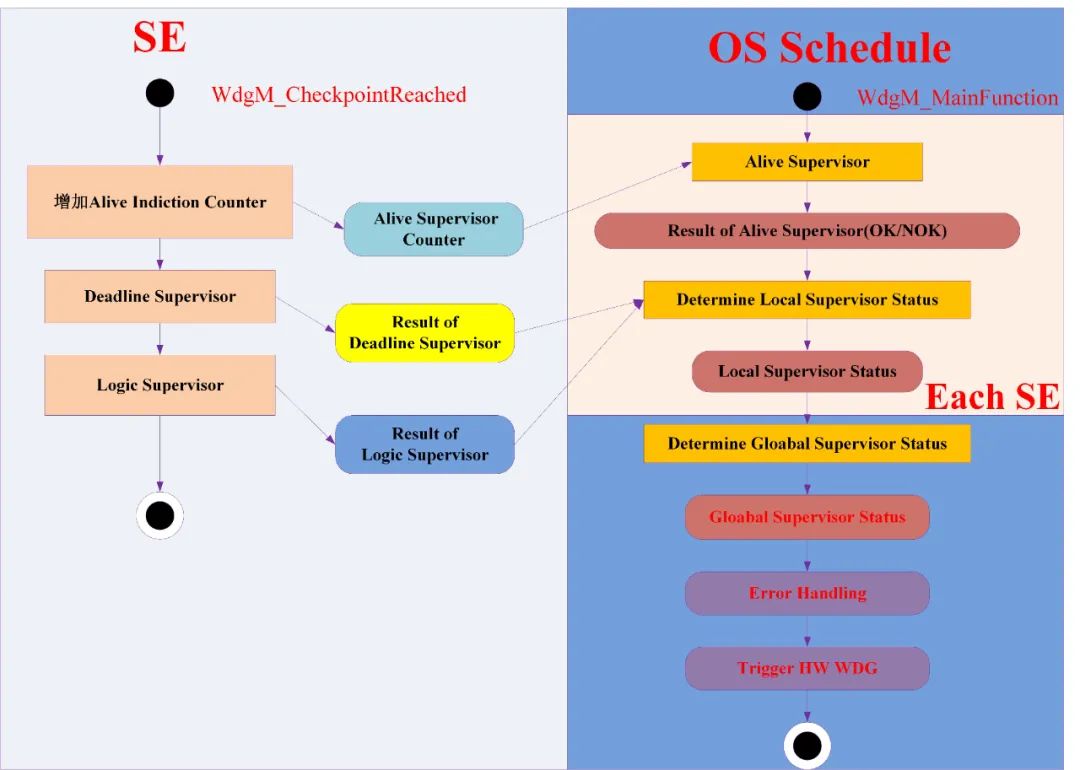
7、Error Handling And Reaction
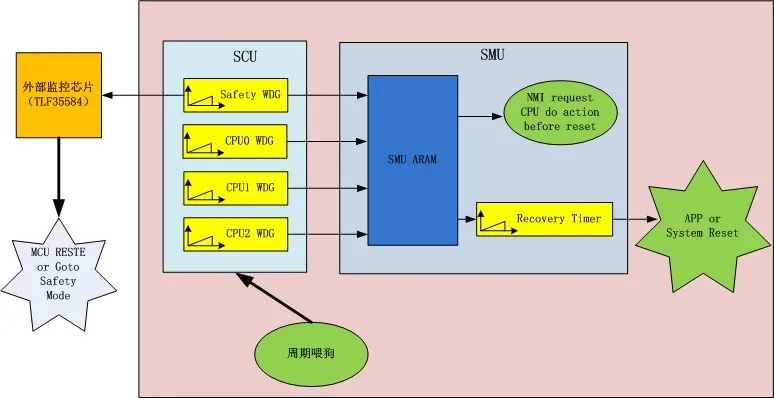
8、Aurix Tricore Wdg Timeout监控实现


投稿合作:18918250345(微信)
“ 转发 ” “ 在看 ” 支持一下吧 END
