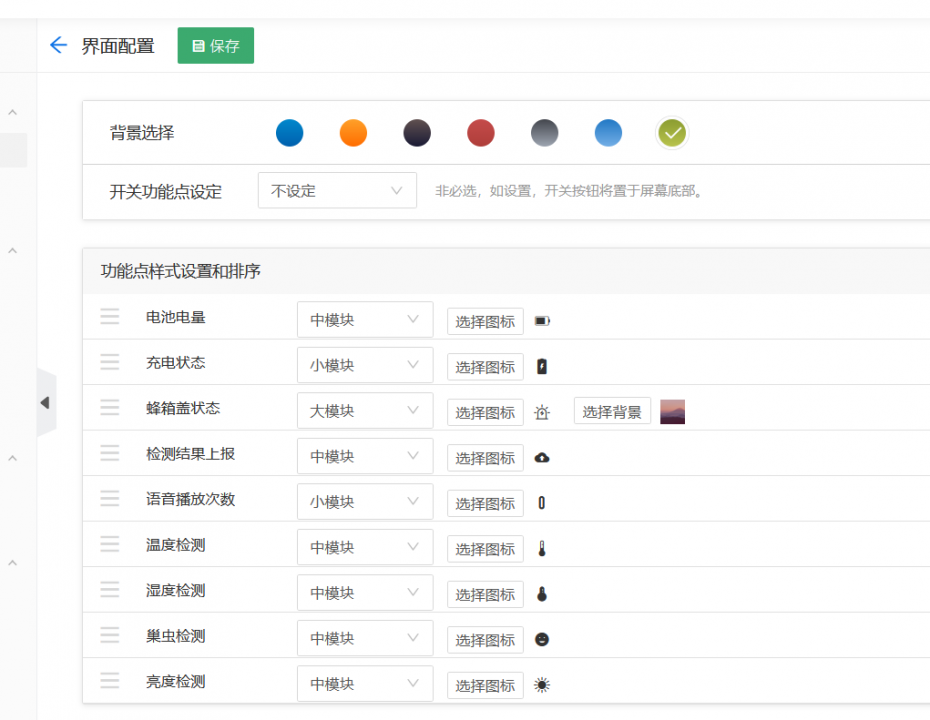

添加完成后,只需打开自己所需的功能点
void Detect_Read(void){Dht11_read();get_voit_d();get_voit_g();UltrasonicWave_StartMeasure();chaoshengbo();}//采集光敏电阻转换为亮度值 A1引脚void get_voit_d(void){float light;light =Get_Adc(1) ;if(light<2600){mcu_dp_enum_update(DPID_COVER_STATE,0); //当前蜂箱盖状态枚举型数据上报;GPIOC ->BRR =GPIO_Pin_13;}else{mcu_dp_enum_update(DPID_COVER_STATE,1); //当前蜂箱盖状态枚举型数据上报;GPIOC ->BSRR =GPIO_Pin_13;}// printf ("%f\r\n",light);}//采集电源电压 A0引脚void get_voit_g(void ){float voit;voit=Get_Adc(0) /4096.0*3.3;voit=voit/3.3*100;mcu_dp_value_update(DPID_BATTERY_PERCENTAGE,voit); //当前电池电量VALUE型数据上报;// printf ("%f\r\n",voit);}/**********************超声波距离计算***************************/void chaoshengbo(void){float juli;juli=TIM_GetCounter(TIM1)*5*34/200.0;if(juli<8&&juli!=0){mcu_dp_bool_update(DPID_CHECK,1); // 当前巢虫检测 BOOL型数据上报;GPIOB ->BRR =GPIO_Pin_4;}else{mcu_dp_bool_update(DPID_CHECK,0); // 当前巢虫检测 BOOL型数据上报;GPIOB ->BSRR =GPIO_Pin_4;}}void Dht11_read(void){u8 temperature;u8 humidity;DHT11_Read_Data(&temperature,&humidity);mcu_dp_value_update(DPID_NOW_TEMP,temperature ); //当前温度检测VALUE型数据上报;mcu_dp_value_update(DPID_HUM,humidity); //当前湿度检测VALUE型数据上报;// printf("temperature=%d\r\n",temperature);// printf("humidity=%d\r\n",humidity);}
int main(void){delay_init(); //延时函数初始化NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2DHT11_Init();uart_init(9600);//用于WiFi模块通信uart2_init(115200);//用于串口通信LED_Init();//用于报警模拟Adc_Init();Timerx_Init(5000,7199);wifi_protocol_init();UltrasonicWave_Configuration();// mcu_reset_wifi();// delay_ms (10);// mcu_set_wifi_mode(SMART_CONFIG );while(1){wifi_uart_service();Detect_Read();}}
