



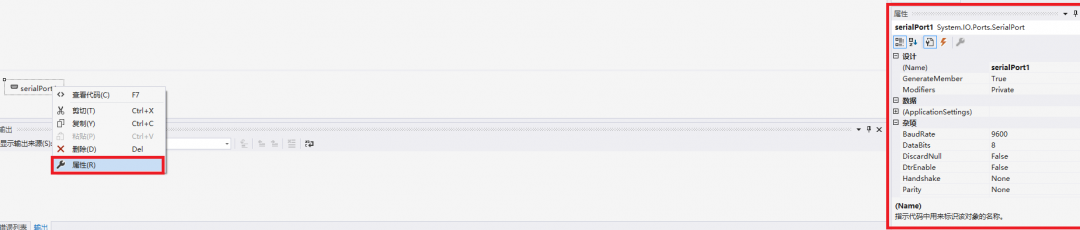

//串口通讯命令publicstatic byte[] SendOrder = new byte[3] { 0x5A,0x00, 0xA5 }; //中间为命令,头尾为校验 00 关灯 01开灯 02关蜂鸣器 03开蜂鸣器// 串口接收public static byte[] revcmd = new byte[3];
private void button1_Click(object sender, EventArgs e) //开灯LED0{try{if (serialPort1.IsOpen){serialPort1.Close();}serialPort1.Open(); //打开串口serialPort1.DiscardInBuffer();//清空缓冲区数据SendOrder[1] = 0x01;//发送开灯命令serialPort1.Write(SendOrder, 0, 3);//写入串口缓冲区}catch{MessageBox.Show("请检查串口1是否打开");}}
private void button2_Click(object sender, EventArgs e){try{if (serialPort1.IsOpen){serialPort1.Close();}serialPort1.Open(); //打开串口serialPort1.DiscardInBuffer();//清空缓冲区数据SendOrder[1] = 0x00;//发送开灯命令serialPort1.Write(SendOrder, 0, 3);//写入串口缓冲区}catch{MessageBox.Show("请检查串口1是否打开");}}
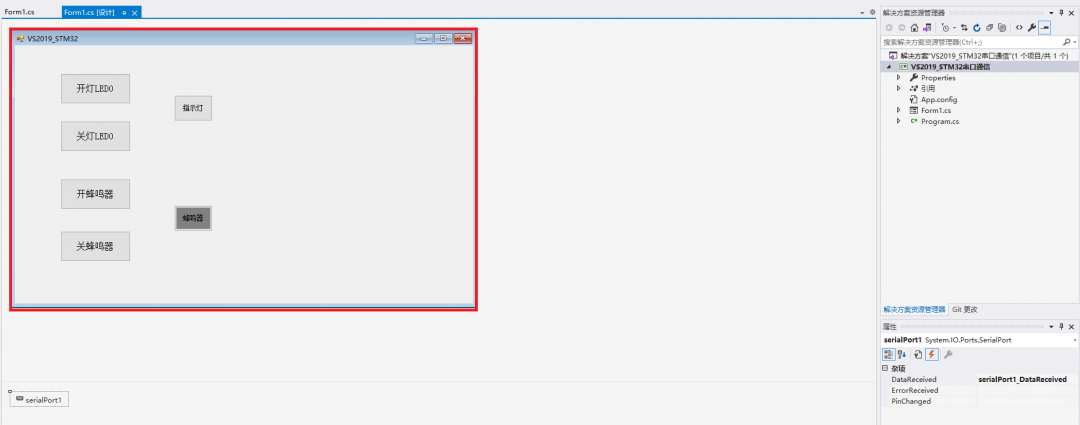
private void serialPort1_DataReceived(object sender, System.IO.Ports.SerialDataReceivedEventArgs e) //串口接收中断{try{serialPort1.Read(revcmd, 0, 3); // 将接收缓冲区输入revcmd}catch{MessageBox.Show("请检查串口1是否打开");}this.Invoke(new EventHandler(ComService)); //调用事件处理函数}15.串口接收数据处理函数如下:private void ComService(object sender, EventArgs e){if ((revcmd[0] == 0x5A) & (revcmd[1] == 0x01) & (revcmd[2] == 0xA5)){button5.Text = "灯开了";button5.BackColor = Color.FromArgb(255, 0, 0); //设置控件颜色为红色// button5.BackColor = Color.FromKnownColor(KnownColor.LightSeaGreen);; //设置控件颜色为}if ((revcmd[0] == 0x5A) & (revcmd[1] == 0x00) & (revcmd[2] == 0xA5)){button5.Text = "灯关了";button5.BackColor = Color.FromArgb(224, 224, 224);//灰色}}
 VS2019_STM32串口通信.rar
(41.29 KB, 下载次数: 8)
VS2019_STM32串口通信.rar
(41.29 KB, 下载次数: 8)
void USART1_IRQHandler(void)//串口1中断服务程序{u8 res;USART1_StartFlag=1;if(USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET){res=USART_ReceiveData(USART1); //读接收到的字节,同时相关标志自动清除if(USART1_RX_CNT<100){USART1_RX_BUFF[USART1_RX_CNT]=res;USART1_RX_CNT++;TIM_ClearITPendingBit(TIM7,TIM_IT_Update);//清除定时器溢出中断TIM_SetCounter(TIM7,0);//当接收到一个新的字节,将定时器7复位为0,重新计时(相当于喂狗)TIM_Cmd(TIM7,ENABLE);//开始计时}}}///////////////////////////////////////////////////////////////////////////////////////串口服务函数void USART1RX_Service(void){if(USART1_FrameFlag==1){USART1_StartFlag=0;USART1_FrameFlag=0; //复位帧结束标志USART1_RX_CNT=0;//接收计数器清零if((USART1_RX_BUFF[0]==0x5A)&&(USART1_RX_BUFF[1]==0x00)&&(USART1_RX_BUFF[2]==0xA5)) //通讯测试 5A 00 A5{SendBUF[0]=0x5A;SendBUF[1]=0x00;SendBUF[2]=0xA5;LED0=1;USART1_SendData(SendBUF,3);}if((USART1_RX_BUFF[0]==0x5A)&&(USART1_RX_BUFF[1]==0x01)&&(USART1_RX_BUFF[2]==0xA5)) //通讯测试 5A 00 A5{SendBUF[0]=0x5A;SendBUF[1]=0x01;SendBUF[2]=0xA5;LED0=0;USART1_SendData(SendBUF,3);}}}
VS2019_STM32通讯实验.rar
(2.43 MB, 下载次数: 8)
由于微信公众号近期改变了推送规则,如果您想经常看到我们的文章,可以在每次阅读后,在页面下方点一个「赞」或「在看」,这样每次推送的文章才会第一时间出现在您的订阅列表里。
猜你喜欢:
分享一篇很不错的CMake入门文章,值得收藏细读!
实用 | 一个高性能通信库的简单使用分享
初学者福利,这里有一款很好上手的GUI
不按套路出牌,这么来写IIC驱动?
干货 | C语言实现面向对象编程(附代码)
2020年精选原创笔记汇总
在公众号聊天界面回复1024,可获取嵌入式资源;回复 m ,可查看文章汇总。

文章都看完了 不点个
不点个 吗
吗
