
void SPI_Digital_Tube_Config(void){SPI_InitTypeDef SPI_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;/* Disable the SPI peripheral */SPI_Cmd(SPI2, DISABLE);/* Enable SCK, MOSI, MISO and NSS GPIO clocks */RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);RCC_AHBPeriphClockCmd(SPI_Digital_Tube_SCK_GPIO_CLK |SPI_Digital_Tube_MOSI_GPIO_CLK|SPI_Digital_Tube_NSS_GPIO_CLK, ENABLE);/* SPI pin mappings */GPIO_PinAFConfig(SPI_Digital_Tube_SCK_GPIO_PORT, SPI_Digital_Tube_SCK_SOURCE, SPI_Digital_Tube_SCK_AF);GPIO_PinAFConfig(SPI_Digital_Tube_MOSI_GPIO_PORT, SPI_Digital_Tube_MOSI_SOURCE, SPI_Digital_Tube_MOSI_AF);GPIO_PinAFConfig(SPI_Digital_Tube_MISO_GPIO_PORT, SPI_Digital_Tube_MISO_SOURCE, SPI_Digital_Tube_MISO_AF);GPIO_PinAFConfig(SPI_Digital_Tube_NSS_GPIO_PORT, SPI_Digital_Tube_NSS_SOURCE, SPI_Digital_Tube_NSS_AF);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3;/* SPI SCK pin configuration */GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_SCK_PIN;GPIO_Init(SPI_Digital_Tube_SCK_GPIO_PORT, &GPIO_InitStructure);/* SPI MOSI pin configuration */GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_MOSI_PIN;GPIO_Init(SPI_Digital_Tube_MOSI_GPIO_PORT, &GPIO_InitStructure);/* SPI MISO pin configuration */GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_MISO_PIN;GPIO_Init(SPI_Digital_Tube_MISO_GPIO_PORT, &GPIO_InitStructure);/* SPI NSS pin configuration */GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_NSS_PIN;GPIO_Init(SPI_Digital_Tube_NSS_GPIO_PORT, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;GPIO_InitStructure.GPIO_Pin = SPI_Digital_Tube_NSS_PIN;GPIO_Init(SPI_Digital_Tube_NSS_GPIO_PORT, &GPIO_InitStructure);/* SPI configuration -------------------------------------------------------*/SPI_I2S_DeInit(SPI2);SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b;SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;// SPI_InitStructure.SPI_NSS = SPI_NSS_Hard;SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;SPI_InitStructure.SPI_CRCPolynomial = 7;SPI_InitStructure.SPI_Mode = SPI_Mode_Master;SPI_Init(SPI2, &SPI_InitStructure);/* Initialize the FIFO threshold */SPI_RxFIFOThresholdConfig(SPI2, SPI_RxFIFOThreshold_QF);/* Enable the SPI peripheral */SPI_Cmd(SPI2, ENABLE);// /* Enable NSS output for master mode */// SPI_SSOutputCmd(SPI2, ENABLE);}
static void BASIC_TIM_Mode_Config(void){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;BASIC_TIM_APBxClock_FUN(BASIC_TIM_CLK, ENABLE);TIM_TimeBaseStructure.TIM_Period = BASIC_TIM_Period;//1msTIM_TimeBaseStructure.TIM_Prescaler= BASIC_TIM_Prescaler;//47TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(BASIC_TIM, &TIM_TimeBaseStructure);TIM_ClearFlag(BASIC_TIM, TIM_FLAG_Update);TIM_ITConfig(BASIC_TIM,TIM_IT_Update,ENABLE);TIM_Cmd(BASIC_TIM, ENABLE);}
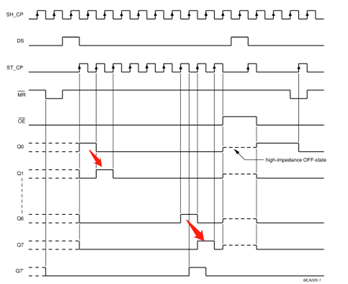
void DisplayNumber(uint16_t num){uint8_t mythousandNum,myhundredNum,mytenNum,myunitNum=0;if(num>9999)num=9999;mythousandNum=num/1000%10;myhundredNum=num/100%10;mytenNum=num/10%10;myunitNum=num%10;switch(mydisplaybit){case thousaud:Display16(mythousandNum,4);mydisplaybit=hundred;break;case hundred:Display16(myhundredNum,3);mydisplaybit=ten;break;case ten:Display16(mytenNum,2);mydisplaybit=unit;break;case unit:Display16(myunitNum,1);mydisplaybit=thousaud;break;default:Display16(mythousandNum,4);mydisplaybit=hundred;break;}}static void Display16(uint8_t num,uint8_t place){GPIO_ResetBits(SPI_Digital_Tube_NSS_GPIO_PORT, SPI_Digital_Tube_NSS_PIN);uint16_t Temp=((Num[num])<<8)+((0x01)<<(place-1));SPI2_Send_Byte16(Temp);GPIO_SetBits(SPI_Digital_Tube_NSS_GPIO_PORT, SPI_Digital_Tube_NSS_PIN);}
void TIM6_DAC_IRQHandler(){static uint16_t counter=0;static uint16_t num_buffer=0;if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET ){counter++;if(counter>499){num_buffer++;counter=0;}DisplayNumber(num_buffer);TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update);}}

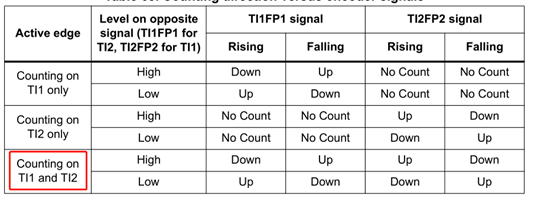
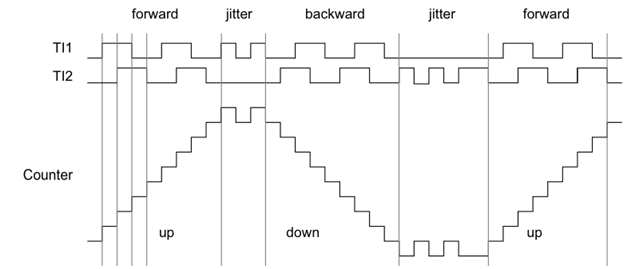
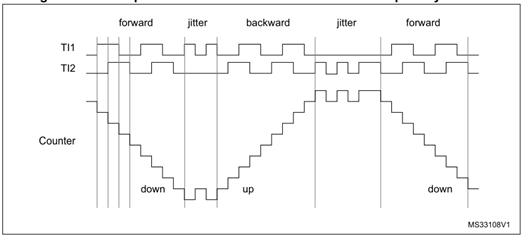
void TIM3_EncoderConfig(void){TIM_ICInitTypeDef TIM_ICInitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;GPIO_InitTypeDef GPIO_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;HALL_TIM_APBxClock_FUN(ENCODER_TIM_CLK, ENABLE);/* GPIOA clock enable */RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); //PA6 & PA7RCC_AHBPeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);/* phase A & B*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_1);//TIM3_CH1GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_1);//TIM3_CH2TIM_DeInit(TIM3);TIM_TimeBaseStructure.TIM_Period =0xffff;TIM_TimeBaseStructure.TIM_Prescaler =0;TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode =TIM_CounterMode_Up;TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_BothEdge,TIM_ICPolarity_BothEdge);TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_ICFilter = 0;TIM_ICInit(TIM3, &TIM_ICInitStructure);// Clear all pending interruptsTIM_ClearFlag(TIM3, TIM_FLAG_Update);TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);//Reset counterTIM_SetCounter(TIM3,0);TIM_Cmd(TIM3, ENABLE);/* Enable the TIM1 global Interrupt */NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}
void TIM6_DAC_IRQHandler(){static uint16_t counter=0;static uint16_t num_buffer=0;static uint16_t temp_now=0;static uint16_t temp_pre=0;static uint16_t speed=0;if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET ){counter++;temp_now=(TIM_GetCounter(TIM3)&0xffff);if(counter>499){num_buffer=(temp_now-temp_pre)>0?temp_now-temp_pre:temp_pre-temp_now;speed=100*num_buffer*60/64;counter=0;}DisplayNumber(speed);if(counter%10==0)temp_pre=temp_now;TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update);}}
void TIM3_IRQHandler (){if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET){TIM_ClearITPendingBit(TIM3, TIM_IT_Update);}}