多传感器融合面临的主要挑战是如何将收集来的大量数据集中在一起,并做出正确决策。
1
多传感器融合
2
融合体系

3
多传感器融合特点
4
在自动驾驶中的应用
5
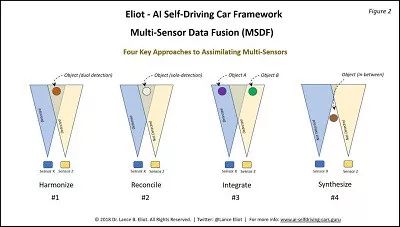
多传感器融合的四个关键方法
免责声明:本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。


为您发布产品,请点击“阅读原文”
