

需要测量大气压力、温度和海拔高度的朋友可以玩玩BMP180这个传感器。
这款传感器出自博世,应用非常广泛。
所用模块
Keil 5
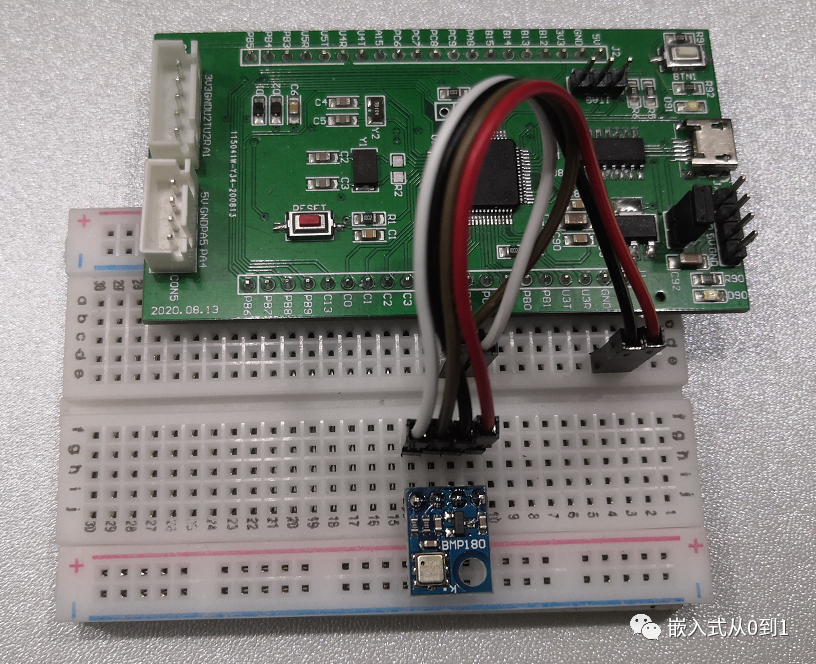
STM32F103RET6核心板(本平台自制专用核心板)
面包板及少许杜邦线
公众号后台回复关键字“BMP180”,获取本模块的STM32代码及BMP180的芯片手册。
BMP180是Bosch Sensortec的一种高精度数字气压和温度传感器,使用BMP180可以测量环境温度、压力和高度。BMP180是超低功耗,低电压的电子元件,经过优化,具有高精度和高稳定性,适用于移动电话,PDA,GPS导航设备和户外设备。
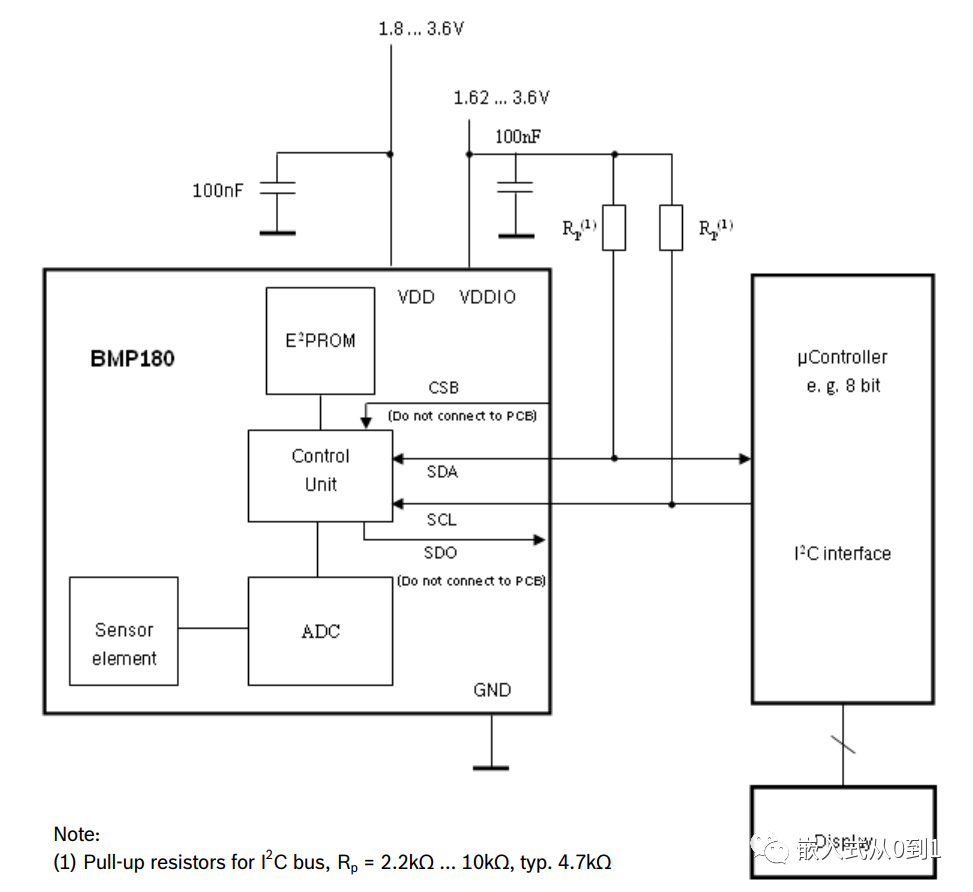
它由压阻传感器、模数转换器,带E2PROM和串行I2C接口的控制单元组成。
BMP180提供未补偿的原始压力值和温度值,在E2PROM中存储了176位的校准参数,使用这些参数可以补偿传感器的偏移量、温度依赖性等参数。
BOSCH BMP180是测量压力和海拔高度最常用的传感器之一。该模块的特点如下:
压力测量范围为300至1100hPa(海拔9000米 ~ -500米)
芯片电压1.8V~3.6V(VDDA),1.62V~3.6V(VDD),模块的VIN输入5V(3.3V亦可)
高精度:低功耗模式下,分辨率为0.06hPa(0.5米),高线性模式下,分辨率为0.03hPa(0.25米)
低功耗(标准模式下为5μA)
内部温度传感器,精度为0.5°C
支持I2C协议进行通信
温度补偿,完全校准
注意:1Pa=0.01hPa=0.01mbar 。
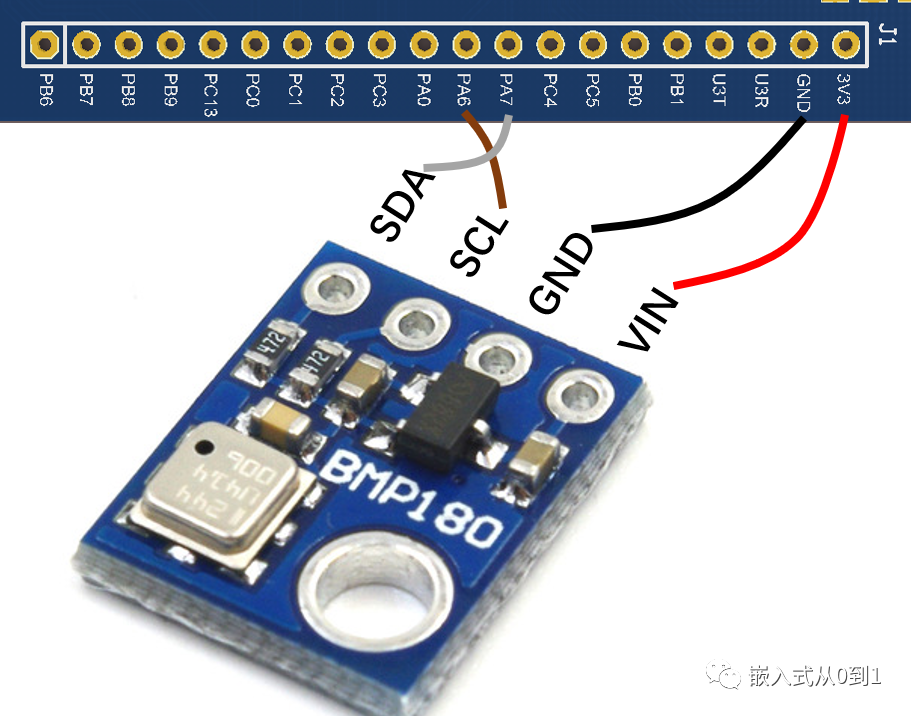
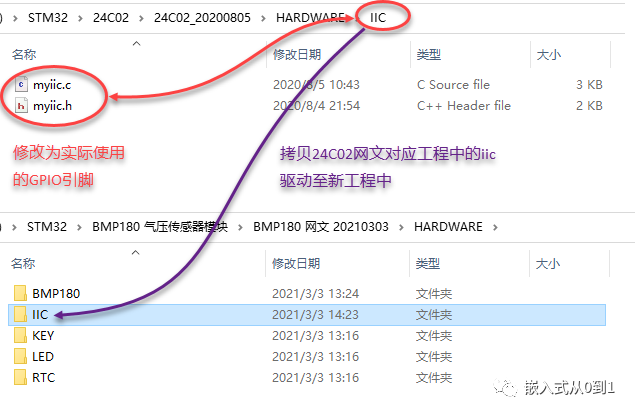
在myiic.h文件中,具体引脚定义如下:
#define IIC_SCL PAout(6) //SCL
#define IIC_SDA PAout(7) //输出SDA
#define READ_SDA PAin(7) //输入SDA
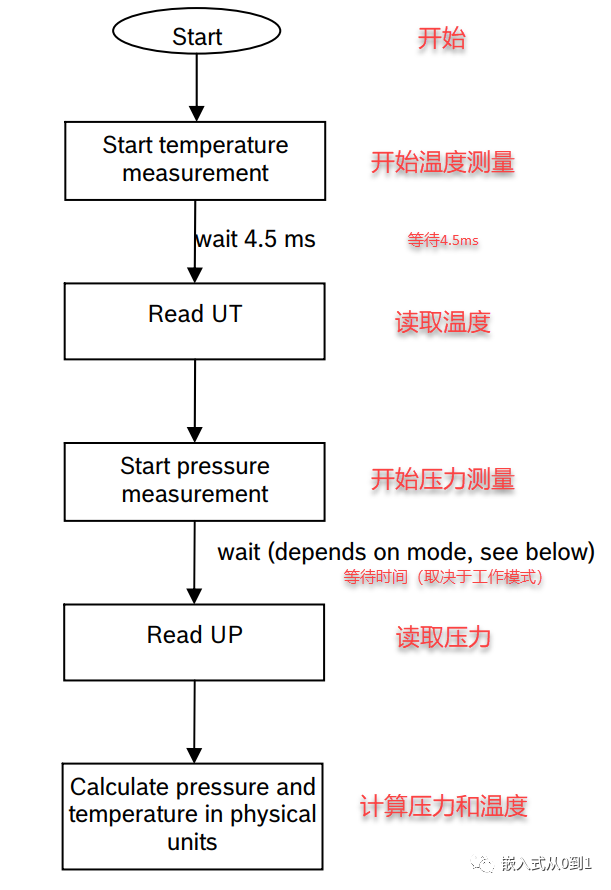
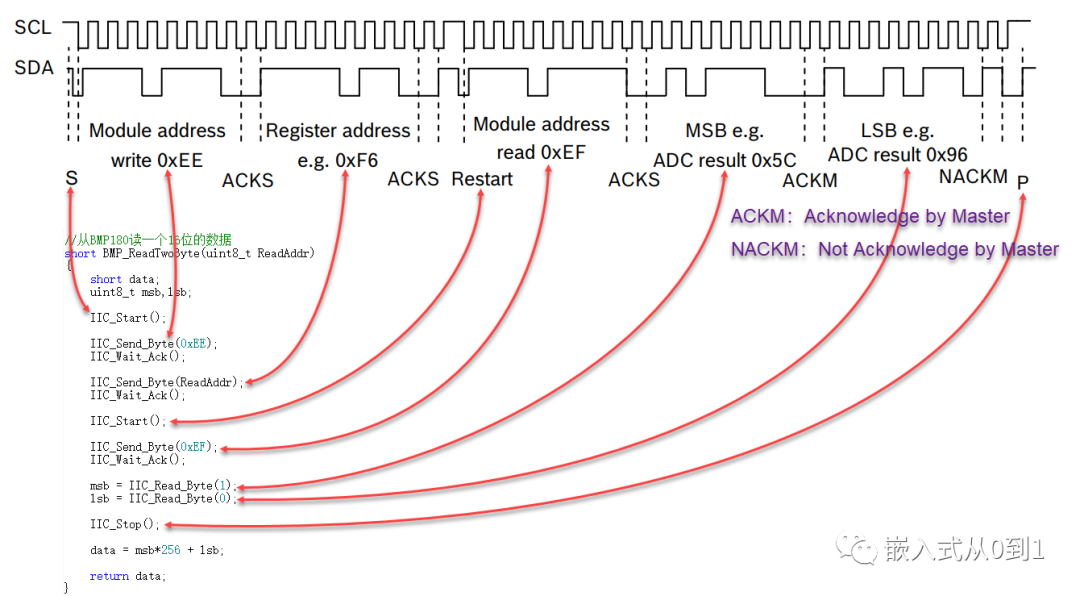
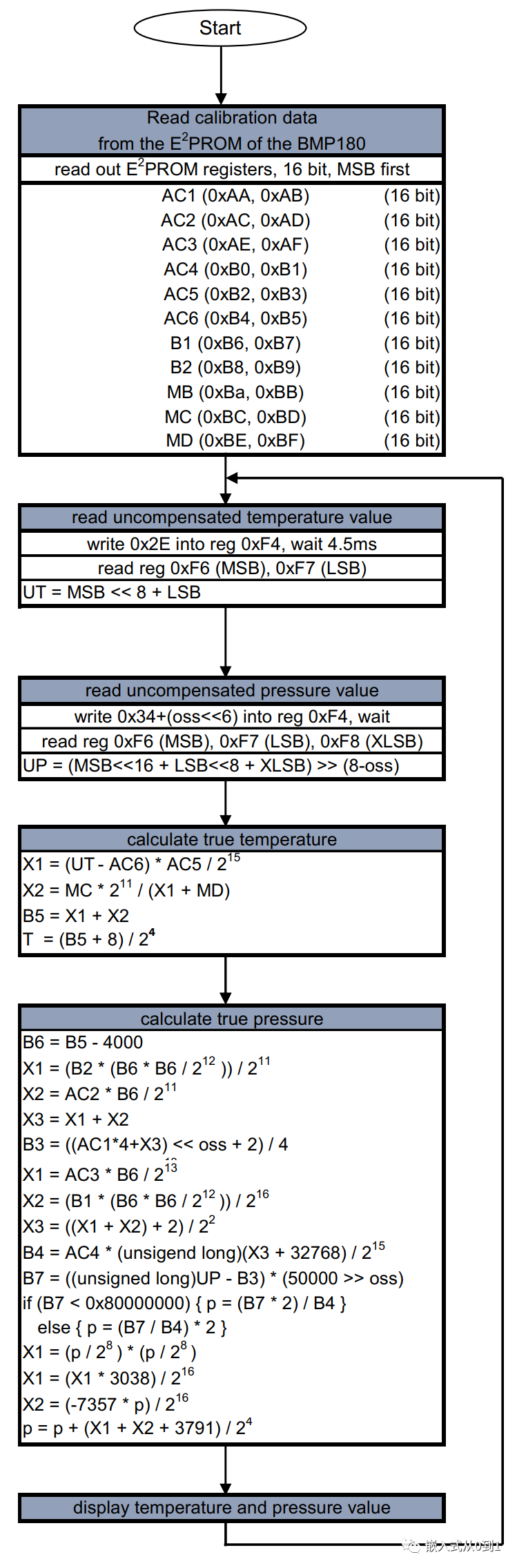
开始测量温度值UT和压力值UP的时序图如下所示。
在启动后,主机发送器件地址,寄存器地址和控制寄存器数据。BMP180每接收8个数据位发送一个确认(ACKS)。主机在最后一次ACKS后发送停止。
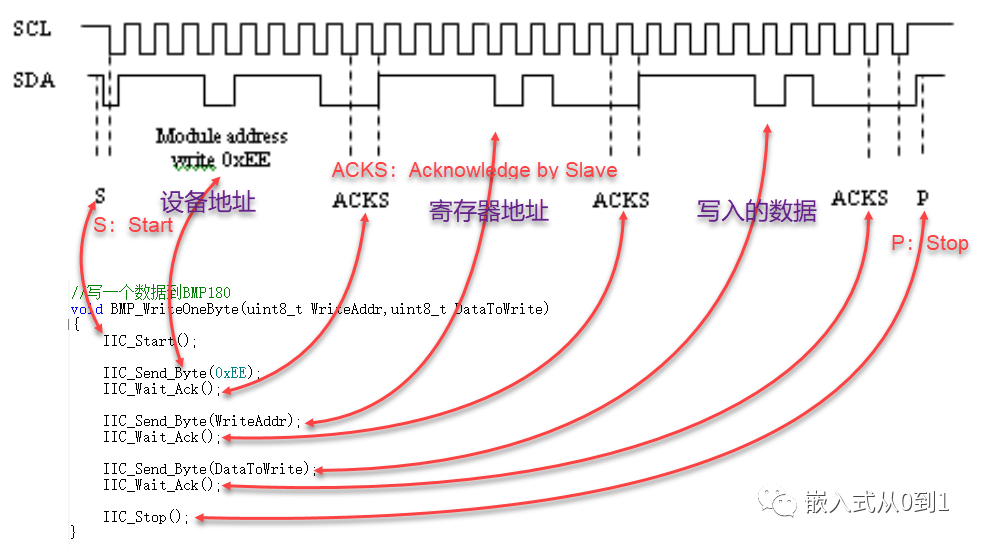
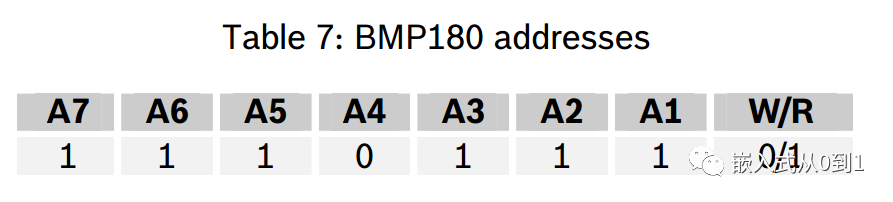
写操作对应地址0XEE(write)
读操作对应地址0XEF(read)
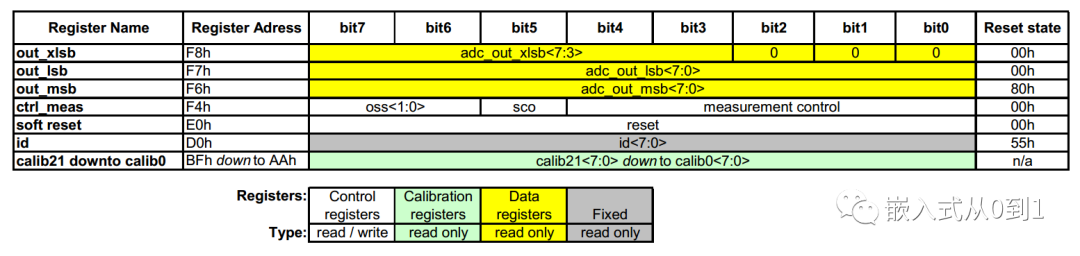
开始温度和压力测量的寄存器地址为:0xF4;
寄存器0xF4的bit5为Sco,开始测量位,当该位为“1”的时候,数据正在转换,当转换结束的时候该位为“0”;
寄存器0xF4的bit6~bit7为Oss,用于控制压力测量的过采样率, (00b: single,01b: 2 times, 10b: 4 times, 11b: 8 times).
软件复位寄存器为:0xE0,如果该寄存器写入0xB6,则完成BMP180的软件复位;
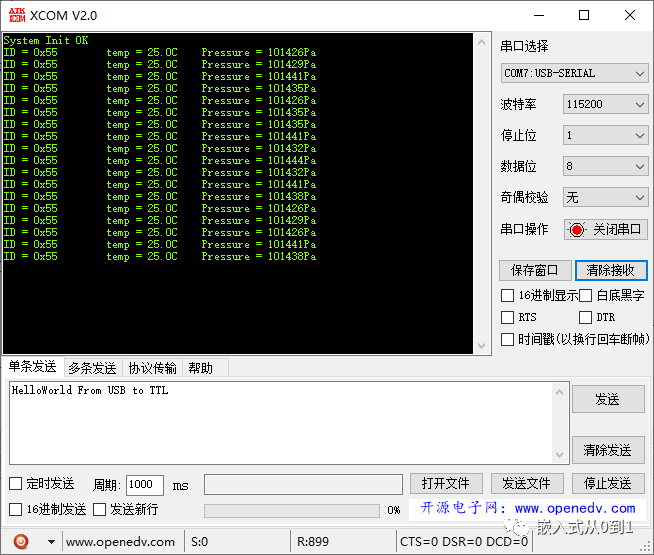
芯片ID寄存器为:0xD0,该值固定为0x55,读出该值可以用于判断I2C总线通讯是否正常。
启动温度和压力测量的寄存器:0xF4,可以写入如下值:
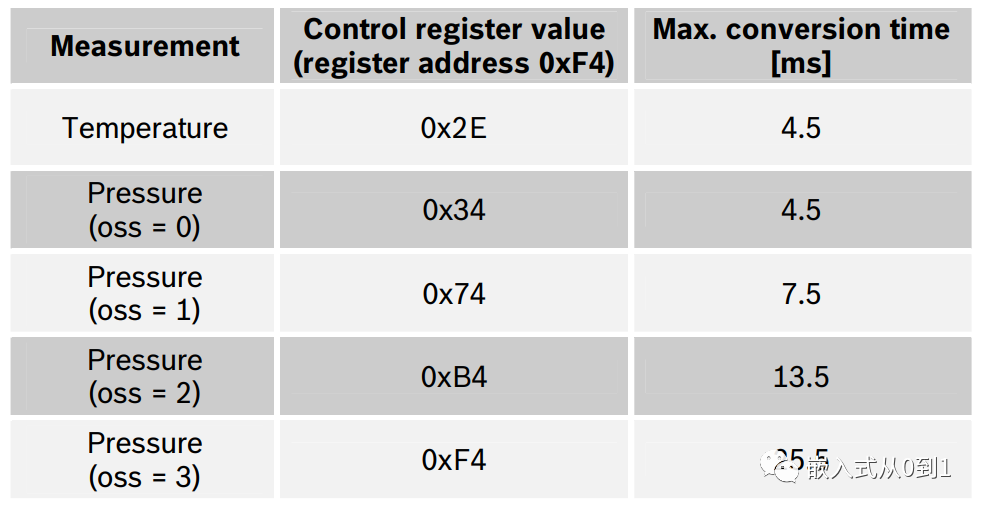
由上表我们可以知道,要想测量温度,需要往0xF4寄存器,写入值0x2E,即开启温度测量,延时之后,读取0xF6寄存器的值即可求得温度值。
//从BMP180读取未修正的温度
long BMP_Read_UT(void)
{
long temp = 0;
BMP_WriteOneByte(0xF4,0x2E);
delay_ms(5);
temp = (long)BMP_ReadTwoByte(0xF6);
return temp;
}
由上表我们可以知道,要想测量压力,需要往0xF4寄存器,写入值0x34(oss值不同,此值不同),即开启压力测量过程,延时之后,读取0xF6寄存器的值即可求得压力值。
//从BMP180读取未修正的大气压
long BMP_Read_UP(void)
{
long pressure = 0;
BMP_WriteOneByte(0xF4,0x34);
delay_ms(5);
pressure = (long)BMP_ReadTwoByte(0xF6);
pressure &= 0x0000FFFF;
return pressure;
}
上面得到的温度值和压力值是未经过校准的值,如果要想得到相对准确的值,需要经过校准,校准系数保存在E2PROM中。
BMP180中有一个176位的E2PROM,它被划分为11个字(WORD),每个字16位,对应11个校准系数,每个传感器模块都有单独的系数,在第一次计算温度和压力时,主机读取E2PROM数据,通过读取的值,看是否存在值为0x0000或者0XFFFF的字,可以判断数据通讯是否正常。
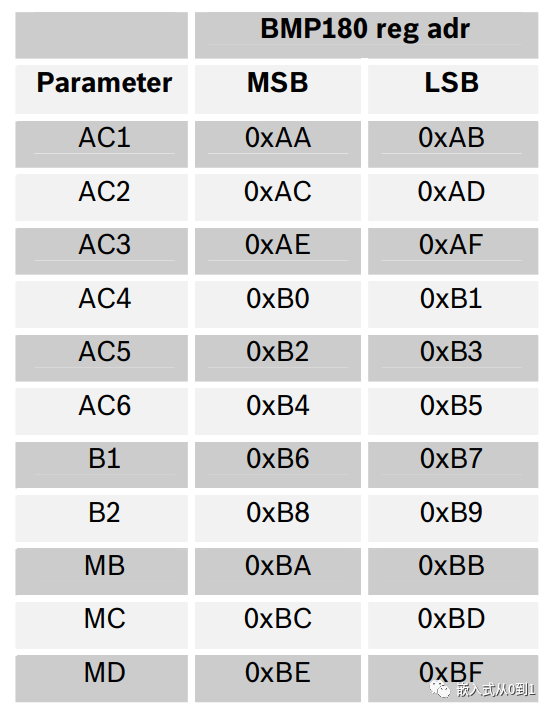
根据上图中寄存器的值,获取校准系数的函数如下,获得的校准系数保存至变量中待用:
//从BMP180的获取校准系数
void BMP_ReadCalibrationData(void)
{
bmp180.AC1 = BMP_ReadTwoByte(0xAA);
bmp180.AC2 = BMP_ReadTwoByte(0xAC);
bmp180.AC3 = BMP_ReadTwoByte(0xAE);
bmp180.AC4 = BMP_ReadTwoByte(0xB0);
bmp180.AC5 = BMP_ReadTwoByte(0xB2);
bmp180.AC6 = BMP_ReadTwoByte(0xB4);
bmp180.B1 = BMP_ReadTwoByte(0xB6);
bmp180.B2 = BMP_ReadTwoByte(0xB8);
bmp180.MB = BMP_ReadTwoByte(0xBA);
bmp180.MC = BMP_ReadTwoByte(0xBC);
bmp180.MD = BMP_ReadTwoByte(0xBE);
}
BMP180传感器提供温度和压力的绝对测量值,但不提供海拔高度的直接输出。
由于大气压力随高度升高而降低。
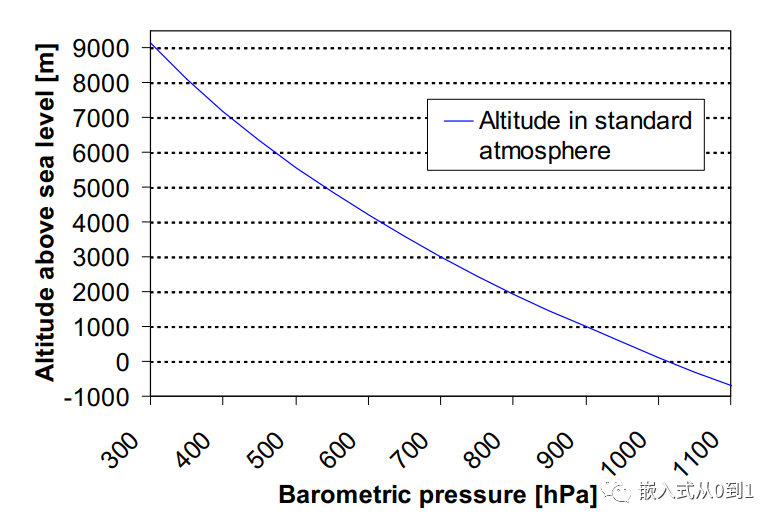
由上图我们可知,气压与海平面的高度具有近似线性的反比,因此如果我们测量了某地的气压,我们可以使用简单的数学运算从海平面计算海拔高度。
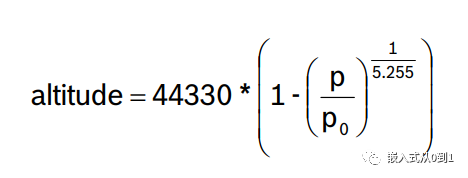
通过当地的气象服务中可以得到海平面压力P0,利用传感器读取的压力P和该海平面压力P0的值,通过上面的公式可以计算传感器所在位置的高度。
注意:海平面压力P0的值不是固定的,跟所属区域及环境温度和天气情况的变化而变化。
STM32 I2C通信操作24C02写数据、读数据
GY-302 数字光照传感器光照模块驱动
跟着小哈一起读AHT20温湿度传感器驱动源码
STM32驱动PCF8591模块,实现AD/DA转换 模数/数模转换

