4月19日,全球首个人形机器人马拉松在北京举行,却因技术问题频发引发广泛关注。本文将探讨机器人技术的现状与挑战,并介绍ZLG致远电子的EtherCAT分析仪如何助力机器人通讯稳定性提升。
 前言2025年4月19日,全球首场人形机器人半程马拉松赛事于北京亦庄正式启幕。这场承载着"科技与人文共生"愿景的赛事,却意外演变成一场状况频出的"翻车"闹剧。ZLG致远电子EtherCAT-Analyzer具备分析人形机器人所有关节和电池与主站的通讯信息,快速掌握节点网络状态,保证通讯稳定,可谓机器人质检员。
前言2025年4月19日,全球首场人形机器人半程马拉松赛事于北京亦庄正式启幕。这场承载着"科技与人文共生"愿景的赛事,却意外演变成一场状况频出的"翻车"闹剧。ZLG致远电子EtherCAT-Analyzer具备分析人形机器人所有关节和电池与主站的通讯信息,快速掌握节点网络状态,保证通讯稳定,可谓机器人质检员。
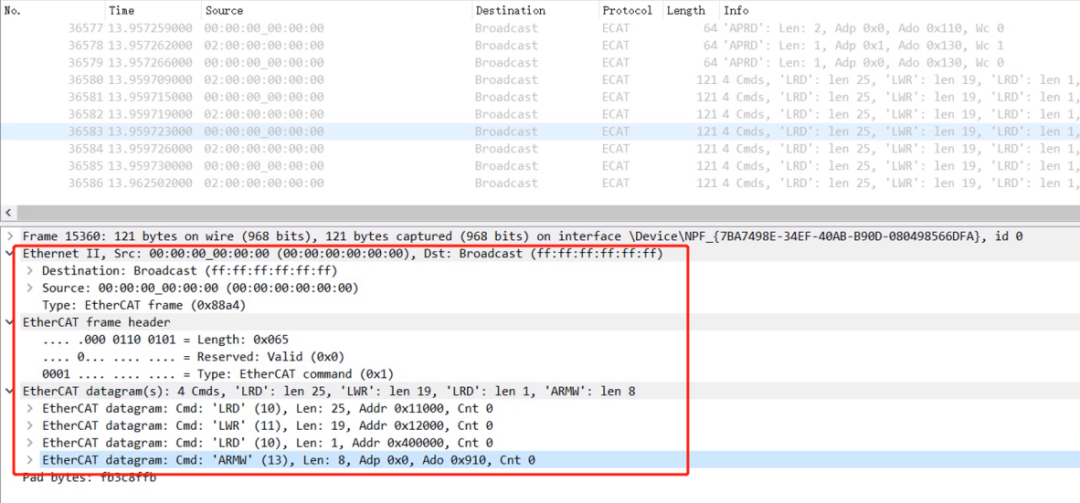
公开考试:从幻想到现实只需要一场马拉松比赛此次马拉松赛事中,参赛机器人集体暴露出续航崩塌、步态紊乱、环境感知失灵等致命缺陷,原本设想的"科技碾压人类"壮景,竟演变为机器人蹒跚跌撞的荒诞图景。能源系统的阿喀琉斯之踵、运动控制的"智能泡沫"困境,以及成本与可靠性之间的不可调和矛盾,已然成为制约机器人发展的三大技术命门。这场赛事不仅是一场公开的技术极限测试,更成为透视人形机器人产业生态现状与未来走向的绝佳棱镜。 ZLG机器人分析仪:在技术洪流中锚定方向,为机器人时代开辟加速通道人形机器人关节作为EtherCAT从站,通过主站控制器轻松完成通信控制。但是,主从通讯过程中经常出现的通讯丢帧、延迟和断开连接等多种通讯异常问题,严重影响工程师们对于机器人的调试与控制,此时迫切需要专业的分析设备快速定位问题点,“对症下药”,解决问题。致远电子EtherCAT分析仪EtherCAT-Analyzer应运而生,其具有网络帧统计(流量、转发延时、错误帧、周期抖动)、网络帧时间分析、网络帧内容分析、GPIO事件分析以及帧数据存储等功能,可快速分析评估人形机器人网络状态,给予“良药”快速解决问题,保障通信稳定。1. 解析协议,定位主从通讯问题
EtherCAT分析仪上位机映射虚拟网卡,查看主从初始化交互信息,获取从站配置参数,掌握各厂家协议差异,解决适配难题。
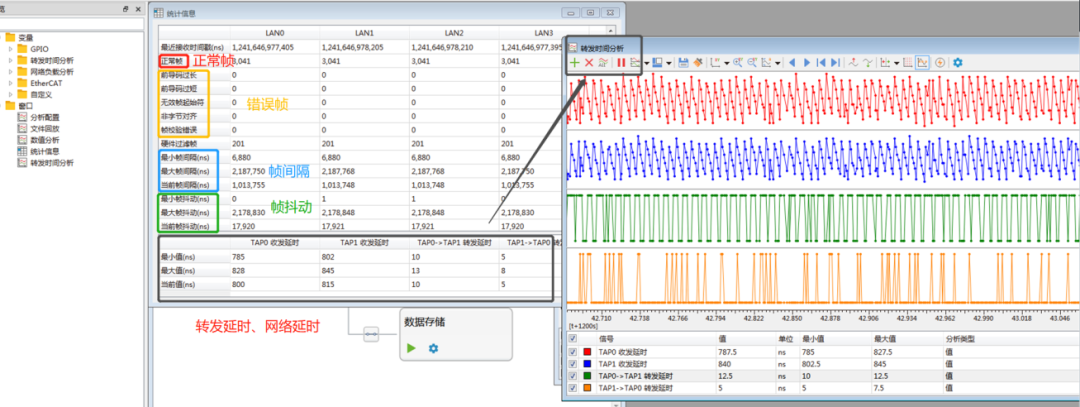
2. 全面统计,便于诊断
上位机查看四个端口的正常帧、错误帧、帧间隔、帧抖动、转发延时、网络延时等统计信息。
3. GPIO事件捕获,满足网络同步分析需求
GPIO事件监控、抓取从站DC中断信号,从而调整合适的偏移时间。
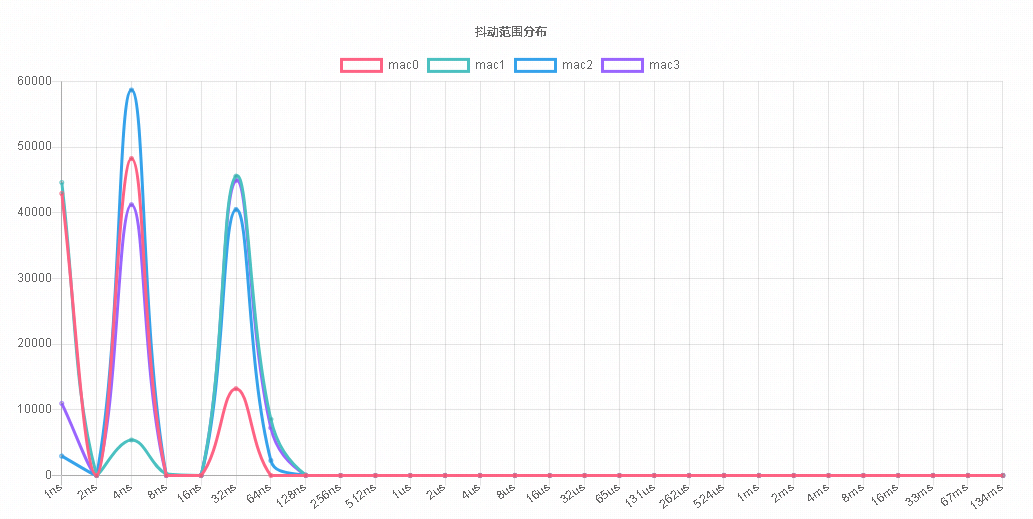
4. <1ns的转发延迟,精准评估主站周期
可查看四个端口的帧转发时间分析,在多节点的EtherCAT网络中,不影响实际通信,精准分析主站实际PDO周期与抖动。
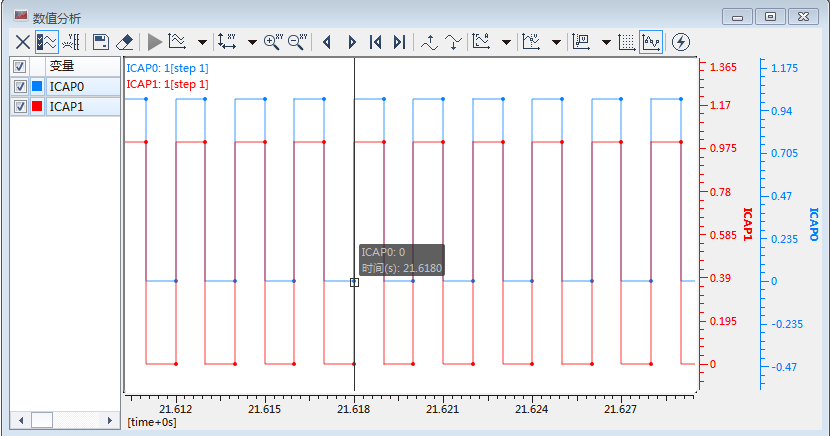
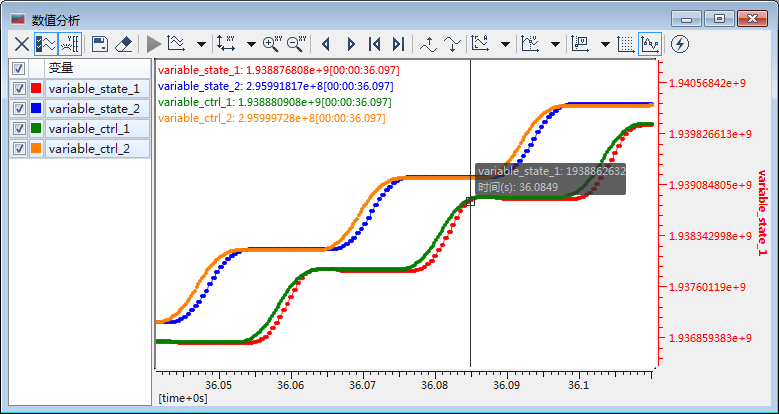
5. 直观的数值曲线,轻松判断从站执行效率
帧内数值曲线分析,按帧偏移和任意扩展协议解析数值,人形机器人各关节电机和算法的跟随曲线分析,找到机械或算法性能瓶颈。
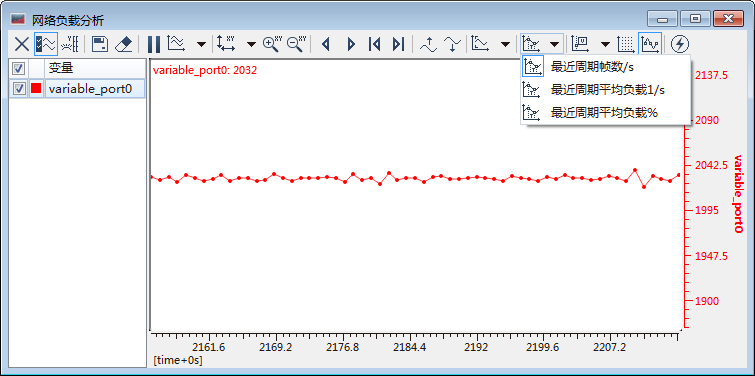
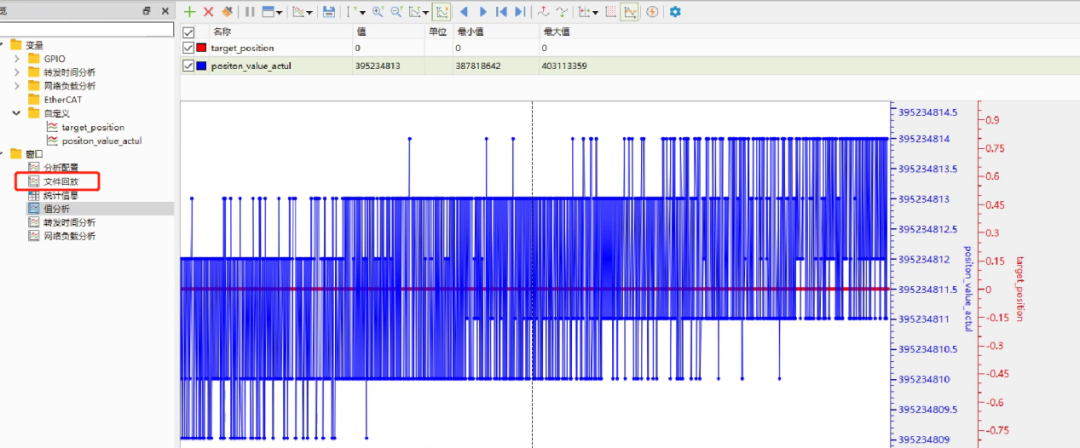
6. 网络负载监测,实时掌握节点帧流量
可对指定数据源进行网络负载分析,同时支持设置过滤,可针对某个PDO进行帧流量分析。上位机配置触发条件,达到相应条件时候,上位机自动保存相关数据至相关路径;过后支持将保存的数据通过上位机重新回放分析。 辩证观照:在失败的褶皱里,窥见进步的微光与希望的胚芽公众认知已实现关键性启蒙。尽管赛事进程波折频现,但"为机器人喝彩"的声浪与社交媒体上的热议浪潮,共同印证了人形机器人正从科幻想象中破茧而出,加速融入大众生活。正如北京经济技术开发区管委会副主任梁靓所言:"马拉松的终点清晰可见,而技术创新的征程永无止境。"公众的包容性关注,已然为未来应用场景铺设了认知的康庄大道。