作者 | 北湾南巷
出品 | 汽车电子与软件
车道偏离保持系统(LKA)是一种先进驾驶辅助系统(ADAS),主要通过实时监测车辆在车道中的位置,当检测到车辆即将无意识地偏离车道边界时,系统通过控制电子助力转向(EPS)系统自动施加轻微的转向力,以帮助驾驶员将车辆引导回车道中央,从而有效降低因注意力分散、疲劳驾驶等因素导致的侧向偏移和碰撞风险。
1.1 系统构成
车道保持辅助系统(LKA)是一项基于环境感知与车辆动态控制的智能驾驶辅助功能,主要用于在高速或城市道路中,防止车辆无意识偏离本车道,从而提升行车安全性。LKA系统的整体架构由三个核心组成部分构成:车道识别传感器、电子控制单元(ECU)以及电子助力转向系统(EPS)。
模块 | 子项/要素 | 详细描述 |
车道识别传感器 | 前视摄像头 |
|
| 安装位置 | 前挡风玻璃上方,靠近内后视镜区域 |
| 主要功能 | 实时采集前方道路图像,识别白色或黄色车道线,实现对车道边界的精准识别与跟踪 |
| 技术要求 | 对不同光照、模糊、遮挡、夜间等复杂场景具备较强鲁棒性 |
电子控制单元(ECU) | 核心功能 | 接收摄像头等传感器数据,分析车辆横向偏移与航向角,判断是否偏离车道,并计算转向干预策略 |
| 输出信号 | 向EPS发出转向扭矩指令 |
| 内部算法模块 |
|
| 车道识别算法 | 精准提取车道线并识别其类型(实线/虚线),进行车道建模与跟踪 |
| 车辆动力学模型 | 构建车辆的横向动力学响应模型,为轨迹预测和控制提供基础 |
| 预测轨迹计算 | 根据当前状态与路况预测未来短时轨迹,判断是否偏离期望车道中心线 |
| 控制律设计 | 采用如PID、LQR、MPC等控制方法生成柔和转向力,平衡舒适性与控制精度 |
电子助力转向系统(EPS) | 功能 | 根据ECU发出的转向请求指令,驱动电动机产生相应方向和大小的转向扭矩,辅助车辆修正偏离 |
| 控制特性 | 实现柔性介入控制,保持驾驶员主导权,确保转向辅助动作自然顺畅 |
| 系统要求 | 响应速度快、控制精度高,具备对微小指令变化的精细控制能力 |
LKA系统通过前视摄像头实现对车道的感知,借助ECU进行高精度轨迹计算与控制决策,并由EPS系统完成实际转向执行,三者紧密协同,共同构建起一套可靠的车道保持辅助机制,有效提升了行车安全性和驾驶舒适性。
1.2 工作原理
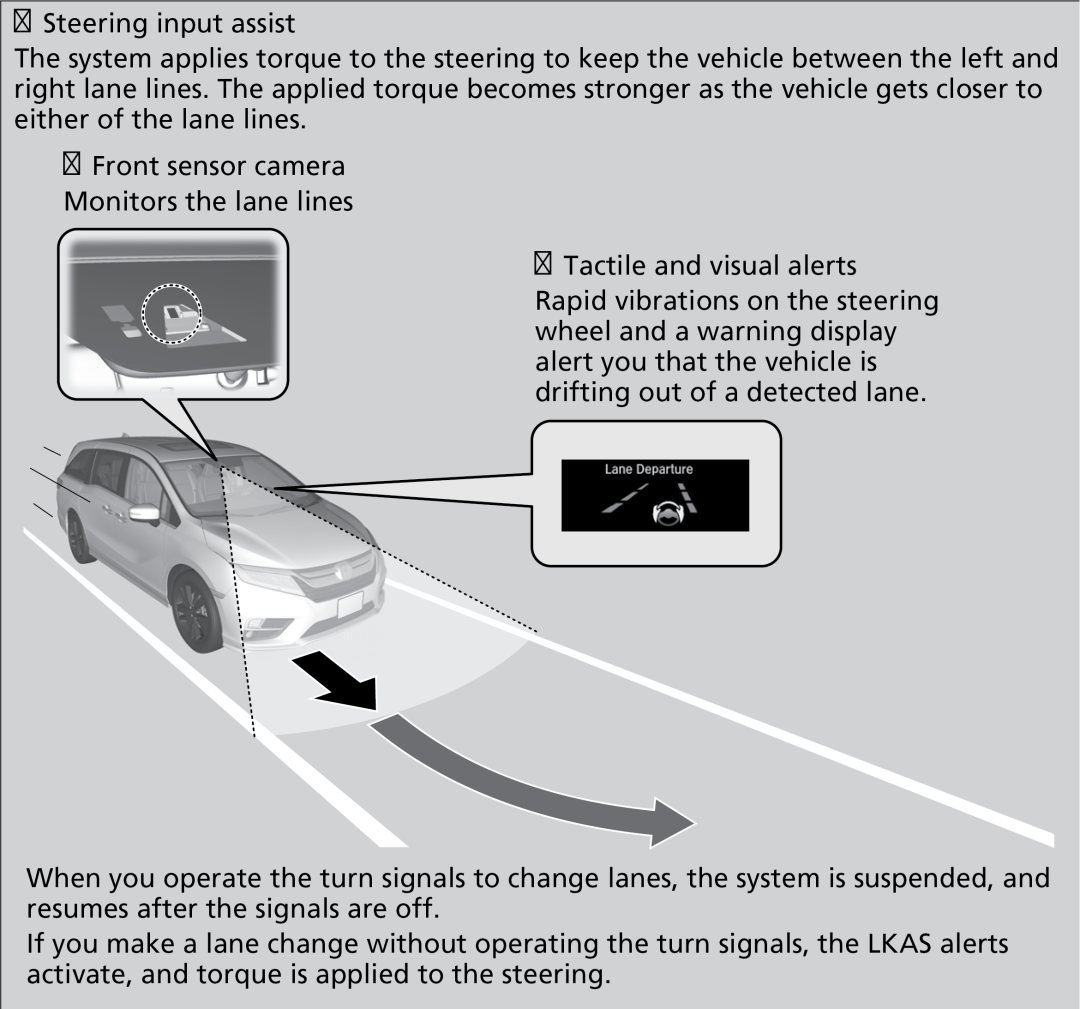
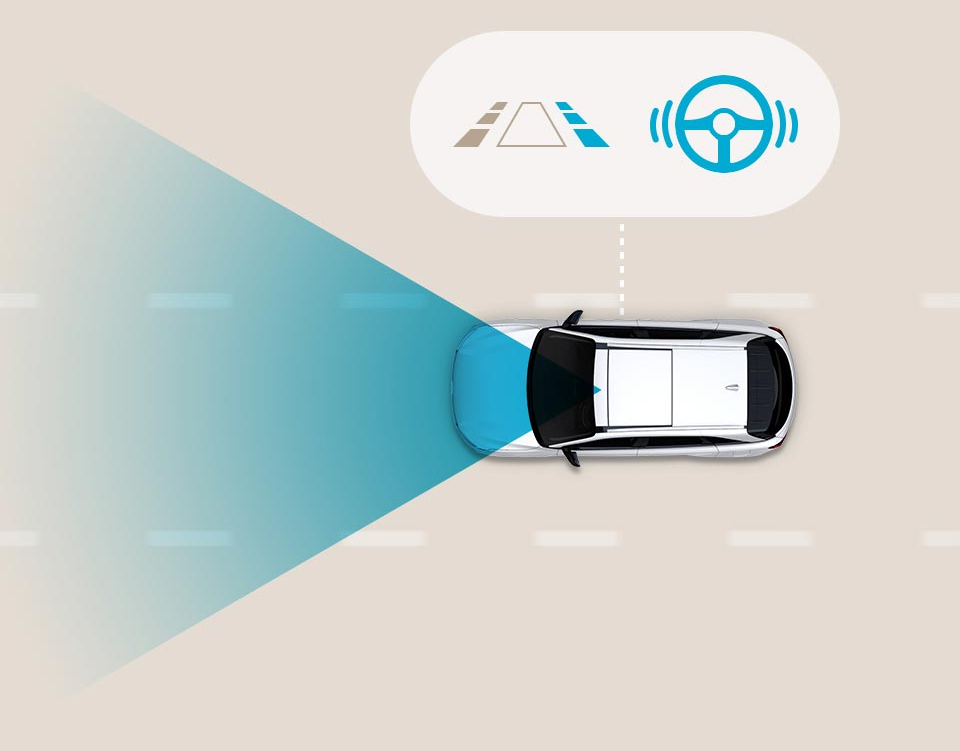
LKA系统的感知核心为安装在前挡风玻璃上方的前视摄像头,该摄像头可持续采集前方路况图像,识别车道线并实时监测车辆与车道的相对位置关系。系统支持识别多种类型的车道线(包括实线、虚线)和多种颜色(如白色、黄色、橙色和蓝色),适应性强,能够覆盖大多数道路场景。此外,即使道路没有明确的交通边线,只要存在可识别的分界线,LKA依然可以正常工作。典型识别参数包括车道宽度、车辆中心与车道中心的偏移量、航向角以及当前偏离趋势等。
1.2.1 适用条件
LKA系统的有效工作范围通常设定在车速 60 km/h 至 150 km/h 之间,适合中高速行驶场景;支持的车道宽度为 2.5 米至 5.5 米,道路最小转弯半径应大于 250 米,以确保系统识别与计算的精度和稳定性。
1.2.2 偏离趋势判断逻辑
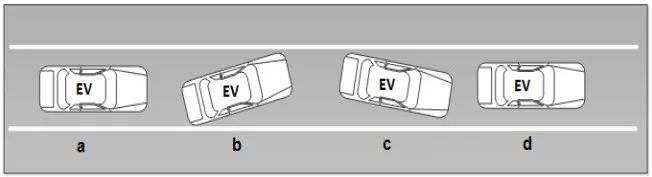
当系统检测到车辆在未打转向灯的情况下,出现明显的向左或向右偏移,并且该偏移趋势可能导致车辆接触或跨越车道边界时,系统将判断为“无意识偏离”。此时LKA会立即进入控制准备阶段,为干预提供决策依据。
1.2.3 辅助控制执行机制
在识别出偏离风险后,系统控制器将综合分析车辆当前的行驶速度、横向偏移角、侧偏速度等参数,计算出合适的转向干预扭矩。该扭矩值随后通过控制指令传递至EPS电机,驱动转向系统实现缓慢、渐进、柔和的修正操作,使车辆回到车道中心。整个过程控制平稳,避免突兀或生硬的转向动作,确保驾驶舒适性。
1.2.4 驾驶员优先原则
为了保障驾驶体验与控制主导权,LKA系统始终遵循“驾驶员优先”原则。若在偏移发生过程中,驾驶员主动施加方向盘转向或开启转向灯,系统会立即中止干预操作,将车辆控制完全交由驾驶员处理,从而避免对正常驾驶行为造成干扰。
#02
2.1 Function Activation(功能开启)机制详解 —— LKA系统激活条件
车道偏离保持系统(LKA)在整车生命周期中并非始终处于激活状态,而是需要在系统硬件与软件准备就绪后,依据多个关键激活条件综合判断是否允许进入工作状态。该激活机制不仅确保系统运行的安全性与稳定性,也为主机厂提供了灵活的功能控制策略。
2.1.1 功能激活的逻辑入口与意义
LKA的功能激活(Function Activation)并不等同于功能运行,而是表示系统已满足所有激活前提,具备进入运行状态的基础条件。若条件不满足,系统将保持待机或不可用(Not Available)状态,即便驾驶员尝试手动开启,也无法进入工作模式。
2.1.2 激活所需满足的典型前置条件
系统激活逻辑通常基于如下四大必要条件(可根据客户项目自定义调整):
硬件初始化完成
EPS控制器、摄像头、雷达(若有)、LKA ECU等关键子系统需成功完成上电自检。
要求通信总线(如CAN/LIN/FlexRay)正常建立并稳定。
电源电压在工作区间(如9~16V),系统无过压/欠压报警。
传感器供电稳定,无硬件故障码(DTC)挂起。
标准信号:
HW_Init_Completed == TRUE
HMI开启LKA功能,或点火周期中已开启
驾驶员可通过中控菜单、组合仪表或方向盘按键选择开启/关闭LKA功能。
若上一个点火周期中LKA为“开启状态”,则当前点火周期可默认自动恢复激活。
具备“记忆上次状态”功能的车型,还可支持用户偏好自动保存。

可能信号示例:
LKA_HMI_Request == ON
LKA_Status_LastCycle == ON
LKA功能正常(无系统级故障)
LKA系统本身状态为 “可用”,无软硬件故障。
ECU与EPS、摄像头之间通信正常,执行器状态正常。
无挂起的功能故障码(如摄像头遮挡、标定失败等)。
状态信号:
LKA_Fault_Flag == FALSE
LKA_Status == OK
车辆配置码(VC Code)中已授权启用LKA功能
OEM在车辆配置阶段需通过诊断配置参数(VC Code/Variant Coding)授权LKA。
常见应用场景包括:高配车型具备该功能,低配车型未配置。
开关状态受工厂软件配置影响,通常由后台写入,无法由驾驶员控制。
信号标志:
LKA_Coding_Enabled == TRUE
2.1.3 客户定制化配置项说明(可选配置)
主机厂可根据整车策略灵活配置功能激活策略,常见配置项包括:
配置项名称 | 描述 |
LKA_AutoStart | 是否允许在上电后自动恢复上次开启状态 |
LKA_EnableUnder10kmh | 是否允许低速(如停车起步)阶段激活 |
LKA_DisableWhenTowMode | 拖车/维修模式下禁止LKA激活 |
LKA_ForceOnByDefault | 是否在首次交车后强制默认开启 |
LKA_DelayStartTime | 延迟若干秒后激活功能(用于系统预热/初始化) |
LKA_HMI_LanguageAdapted | 功能可用性HMI提示是否支持多语言定制 |
2.1.4 功能激活后状态监控与维持
即便LKA已激活,系统仍会在运行过程中持续监控以下参数,确保功能持续可用:
车速处于允许区间(如30km/h~150km/h)
车道线检测成功
转向灯未开启
驾驶员无主动转向操作(或符合设定的最小转向力门槛)
若运行中检测到不满足运行条件,系统将主动退出干预模式,但激活状态保持不变。
2.1.5 激活失败的典型原因与应对策略
失败原因 | 应对措施 |
摄像头初始化失败 | 检查遮挡、标定状态、摄像头供电是否正常 |
EPS通信中断 | 检查CAN网络、线束、终端电阻 |
电源电压不在工作范围 | 检查电池健康状态,或是否处于低功耗模式 |
HMI未开启或误操作关闭 | 提醒驾驶员开启系统 |
软件配置未启用LKA功能码 | 通过诊断工具检查配置参数是否匹配 |
LKA系统的“功能激活”机制是其进入正常工作状态的前提门槛,通过多层次硬件状态、软件逻辑、用户设置、OEM配置的联合判断,确保在安全、稳定、受控的条件下进入功能运行模式。它不仅体现了系统安全设计的严谨性,也为整车厂提供了高度可配置与定制化的能力。
2.2 Function Deactivation(功能解除)机制详解 —— LKA系统退出激活条件
LKA(Lane Keeping Assist)系统功能解除(Deactivation)指的是系统退出 “功能激活状态” ,不再具备进入控制/干预运行的前提能力,通常由驾驶员意图、系统状态变化或车辆配置策略触发。
2.2.1 能解除的目的与系统角色
LKA作为一项主动干预类安全功能,在解除时必须保证:
驾驶员明确知情或系统给予清晰提示;
系统退出时不会产生错误干预;
对车辆控制系统(如EPS)不再发出指令;
HMI(人机交互界面)实时同步当前状态。
2.2.2 功能解除的三大典型触发条件(标准化可配置)
LKA功能可通过下列任一条件满足时被解除,不同OEM项目可根据需求进行定制配置:
HMI关闭LKA功能 / 本点火周期中未开启
主动触发场景:驾驶员通过仪表菜单、物理按键或中控界面关闭LKA功能。
自动恢复机制:若系统支持“记忆上次状态”,当前未开启状态将保持至下一个点火周期。
仪表显示:LKA状态指示符熄灭,可能显示“LKA已关闭”或无图标。
典型信号变更:
LKA_HMI_Request = OFF
LKA_Enabled_Flag = FALSE
应用情境:
驾驶员偏好关闭干预;
在特殊路况(如连续弯道、施工区域)下希望完全手动驾驶。
LKA功能故障(系统级不可用)
LKA核心软硬件模块出现故障时将立即触发功能解除,常见触发源包括:
故障类型 | 描述 |
摄像头不可用 | 遮挡、标定失效、过热、脱落、软件故障 |
EPS转向执行器异常 | 电流过大、电机驱动故障、内阻异常、通信中断 |
通信异常(如CAN中断) | 摄像头 ↔ LKA ECU ↔ EPS间通信中断 |
电源异常 | 电压过高/过低、电池健康状态差 |
LKA软件内部错误或看门狗 | 内部程序运行异常、自检失败 |
系统行为:
清除所有控制指令;
触发故障码(DTC)挂起;
LKA状态设为“Not Available”;
HMI显示“LKA系统故障,请检查”提示。
标准信号:
LKA_Fault_Active = TRUE
LKA_Status = FAILED
车辆配置码被关闭 / 功能未授权
OEM配置阶段未激活LKA功能,或由于后续配置变更(如ECU更换、售后编码)将功能禁用。
通常通过诊断工具写入的Variant Coding参数控制,用户不可直接更改。
功能配置码状态决定是否允许LKA激活,在配置为“禁用”状态下,无论硬件状态如何,LKA始终保持未激活状态。
信号体现:
LKA_Coding_Enabled = FALSE
系统可能直接屏蔽HMI界面的LKA功能项(即UI不可见)。
2.2.3 功能解除后系统的状态响应与处理逻辑
一旦解除触发,系统需完成以下响应流程:
系统模块 | 状态变化 |
LKA主控模块 | 清除输出值、设置 LKA_Active = FALSE |
EPS系统 | 不再接收LKA输入的扭矩指令,恢复为纯HPS/EPS模式 |
摄像头识别 | 仍然可能继续工作,但其输出不再用于LKA控制 |
HMI界面 | 图标熄灭、状态提示切换(如“功能关闭”或“系统不可用”) |
故障记录与诊断 | 若由故障触发,挂载DTC至诊断模块并上报 |
2.2.4 可配置的解除策略逻辑(OEM可定制参数项)
主机厂可根据安全策略、客户需求、整车控制策略定义以下功能解除相关配置项:
配置项 | 功能描述 |
LKA_AllowUserDisable | 是否允许用户手动关闭LKA功能 |
LKA_IgnoreFaultX | 针对某类非关键故障是否允许不立即解除功能 |
LKA_DisableOnTowMode | 拖车模式下是否自动解除LKA功能 |
LKA_DisableAfterLowBattery | 检测到低电压后是否自动解除 |
LKA_DisableOnEPS_FaultMinor | EPS轻微故障(非致命)是否触发LKA解除 |
LKA_DisableOnSensorTempHigh | 摄像头温度过高时是否允许自动解除 |
2.2.5 与其它系统的协同解除策略
LKA解除常与以下系统状态发生交互,主控逻辑中需包含联动判断:
协同系统 | 状态联动描述 |
ACC/ADAS集成控制 | LKA解除可能触发ACC策略切换,例如降低巡航速度 |
驾驶模式系统 | 进入极限运动模式(如Track Mode)下LKA可自动解除 |
NOA/高速导航辅助 | LKA功能解除时,将影响NOA控制策略的激活与容错切换 |
电源管理系统 | 系统处于节能模式下可能不允许LKA重新激活 |
2.2.6 HMI反馈策略与用户提示设计建议
功能解除后,需在用户界面上给予清晰、易懂、实时的提示,以增强用户理解与信任:
状态 | 建议HMI提示语 | 图标状态 |
用户手动关闭 | “LKA功能已关闭” | 灰色 |
系统故障自动解除 | “LKA系统不可用,请检查” | 黄/红色 |
配置未启用(永久) | 无图标,或提示“当前车辆不支持LKA功能” | 不显示 |

LKA的 “功能解除” 逻辑是确保系统在不安全或不合规条件下主动退出干预的重要策略,其设计必须兼顾:
系统安全性保障;
用户可感知与反馈;
与整车策略的联动一致性;
对功能状态切换逻辑的清晰可控。
此外,主机厂可通过Variant Coding、策略参数灵活地调整功能激活与解除条件,以适应不同市场法规与用户需求。
#03
3.1 State Machine / Operating Sequence 状态机/工作序列
State machine diagram 状态迁移图
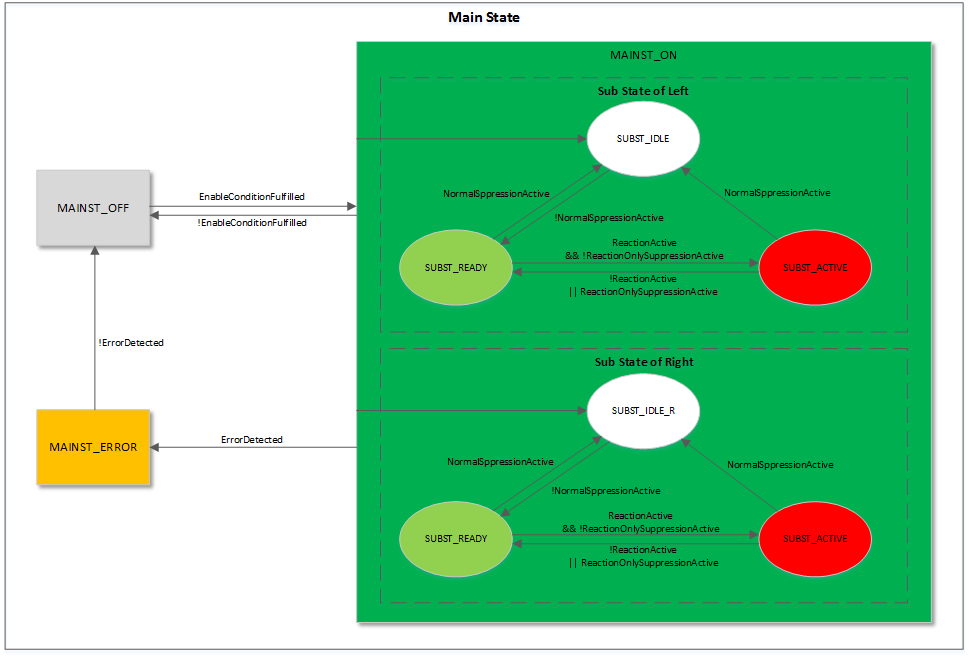
LKA状态机
状态转换条件解释(通用)
条件 | 含义解释 |
EnableConditionFulfilled | 启动条件满足,系统从 OFF 进入 ON |
!EnableConditionFulfilled | 启动条件不满足,系统返回 OFF |
ErrorDetected | 错误检测到,进入 ERROR 状态 |
!ErrorDetected | 错误消除,离开 ERROR 状态 |
NormalSuppressionActive | 表示正常的抑制逻辑正在运行 |
!NormalSuppressionActive | 表示正常抑制未激活,有可能触发反应 |
ReactionActive | 反应机制被激活 |
ReactionOnlySuppressionActive | 仅反应抑制机制被激活 |
LKA包括两种状态:
主状态层(Main State)
子状态层(Sub State):在 MAINST_ON 状态下分为两个区域:
Sub State of Left(左子状态)
Sub State of Right(右子状态)
主状态共有三个:
主状态名称 | 状态说明 | 进入条件 | 可转移状态及条件 | 备注说明 |
MAINST_OFF | 系统处于关闭或未激活状态。 | !EnableConditionFulfilled(未满足使能条件) | 转移到MAINST_ON,当EnableConditionFulfilled为真 | 初始状态;当系统未准备好或未激活时保持此状态 |
(灰色块) | 转移到 | |||
MAINST_ON | 系统处于正常运行状态。包含子状态Left和Right。 | EnableConditionFulfilled(满足使能条件) | 转移到MAINST_ERROR,当ErrorDetected为真 | 主功能运行状态;子状态执行具体任务 |
(绿色大框) | ||||
MAINST_ERROR | 系统检测到错误,进入故障状态。 | ErrorDetected(检测到系统故障) | 转移到MAINST_OFF,当!ErrorDetected(错误消除) | 故障处理状态;支持从 ON 或 OFF 状态进入 |
(黄色块) |
每一侧(左侧和右侧)有三种子状态:
SUBST_READY(绿色椭圆):初始准备状态
当 NormalSuppressionActive 为真,跳转至 SUBST_IDLE。
当 !NormalSuppressionActive && (ReactionActive && !ReactionOnlySuppressionActive) 或 ReactionActive || ReactionOnlySuppressionActive,跳转至 SUBST_ACTIVE。
SUBST_IDLE(白色椭圆):空闲状态,表示处于等待或无动作阶段。
条件:
从 SUBST_READY来:NormalSuppressionActive
可跳转到SUBST_ACTIVE:!NormalSuppressionActive && (ReactionActive && !ReactionOnlySuppressionActive) 或 ReactionActive || ReactionOnlySuppressionActive
SUBST_ACTIVE(红色椭圆):活动状态,表示系统正在运行某些反应任务。
可回到SUBST_IDLE,条件是 NormalSuppressionActive
LKA状态与输出信号的映射机制:
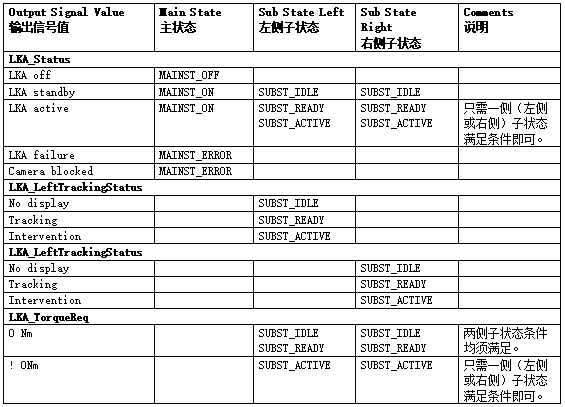
该状态图定义了一个主控系统从“关闭→开启→错误恢复”及其在开启状态下的左右两个子模块的三态流转逻辑,通过复杂的条件控制其响应行为,保障系统的灵活响应和安全切换。
3.2 Typical Use Cases 典型用例
Use Case Figure 使用案例图例 | Use Case Description 使用案例描述 |
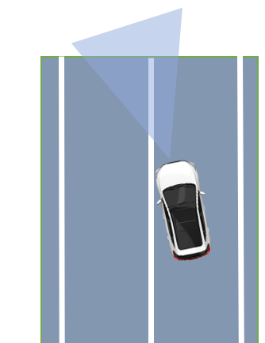
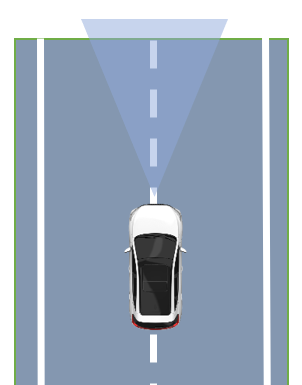
| 直道偏离辅助 · 当车辆行驶在直线道路上并逐渐靠近车道边缘时,LKA(车道保持辅助)系统会主动介入,对电子助力转向系统(EPS)发出控制指令,实施轻微转向修正,以帮助车辆维持在车道中央。 · 若此时驾驶员未主动干预方向盘,系统将临时接管转向控制,在一定时间内(例如约20秒)持续保持车辆行驶在车道内,确保行驶安全。 · 超过设定的控制时限后,为确保驾驶员处于有效驾驶状态,系统会通过HMI发出声音或视觉提示,提醒驾驶员接管方向。 · 若驾驶员在警告后仍未接管,系统出于安全考虑将主动解除LKA功能,使车辆完全交还至驾驶员控制。 |
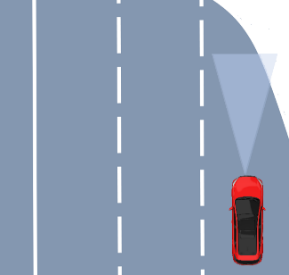
| 弯道偏离辅助 · 当车辆在弯道上行驶并逐渐接近车道边缘时,LKA(车道保持辅助)系统会实时评估车辆的行驶轨迹和车道曲率,通过电子助力转向系统(EPS)实施主动干预,引导车辆保持在车道中央行驶轨道上。 · 系统可有效支持的最小车道曲率半径为250米。该能力与EPS系统的性能参数密切相关,尤其与LKA可请求的最大转向辅助力矩有关。当道路曲率小于该极限时,系统可能无法实现有效的偏离干预。 · 为避免频繁触发转向修正干预,影响驾驶舒适性,LKA在算法中引入“虚拟车道边界”概念,即在系统内部将车道实际边界适当向弯道内侧偏移,从而在非必要情况下不立即介入,使辅助更加柔和、自然,减少对驾驶员的干扰。 |
| 有意识变道
· 驾驶员主导优先:当系统检测到驾驶员主动执行变道操作,如开启转向灯或主动施加较大幅度的转向力,LKA(车道保持辅助)系统将识别此行为为“有意识变道”,自动抑制干预逻辑,不触发转向修正动作,以确保驾驶员能流畅地完成变道,避免因系统干预而产生不适或安全风险。 · 不一致偏移处理:若驾驶员开启的是某一方向的转向灯(例如左转灯),但车辆却明显向另一侧(如右侧)发生偏移,系统将此识别为非一致性行为。此时,LKA功能将正常激活,执行相应的转向辅助,防止车辆无意识地偏离车道,增强安全性。
抑制条件举例:
· 左转灯开启 + 向左偏离 → 抑制干预(判断为主动变道) · 右转灯开启 + 向右偏离 → 抑制干预 · 未开转向灯 + 向任一侧偏离 → 执行干预(判断为无意识偏离) · 开左转灯 + 向右偏离 → 执行干预(方向不一致)
|
| 并道 · 在车道合并时,当车辆所在车道逐渐变窄且未发生车道偏离的情况下,LKA系统不会启动干预。 |
| 窄道 · 如果车道过于狭窄,比如乡村道路,LKA系统将延迟触发。 |
| 骑线行驶 · 当驾驶员故意靠近车道线或骑行车道线时,LKA系统不会启动干预。 |
| 单线 · LKA系统仅在车道有明确车道线的一侧起作用。 |
#04
LKA(车道保持辅助)系统的性能受到多个外部环境因素的显著影响,尤其是天气、照明条件以及车道线的清晰度。以下是具体影响因素:
影响因素 | 具体描述 | 影响结果 |
天气条件 | 背光、日落或低太阳角度:阳光可能直接照射到摄像头或传感器,导致车道线的识别变得困难。 | LKA系统可能无法准确识别车道线,导致系统性能下降,无法提供车道保持辅助。 |
| 路面被冰雪覆盖:车道线可能被积雪覆盖,传感器的清晰度受到影响,系统无法准确识别车道边界。 | LKA功能显著下降,无法在冰雪覆盖路面上正常工作。 |
| 路面磨损严重或车道线模糊:路面长时间磨损或车道线不清晰,传感器无法识别车道边界。 | LKA系统无法识别车道线,导致功能无法正常运行。 |
光照条件 | 低照度环境:如夜晚、隧道或环境照度<20lux时,摄像头或传感器的效果受到显著影响,系统的识别精度降低,容易出现误判。 | LKA系统无法正常识别车道线,导致干预精度降低或误操作,甚至无法启动。 |
| 环境亮度≥20lux:在晴天和多云天气中,光照充足时,系统的传感器能够清晰地识别车道线,确保车道保持辅助功能的有效性。 | LKA系统能够正常工作,确保车道线的识别精度和干预准确性。 |
车道线清晰度 | 1车道线模糊、断裂或缺失:车道线由于磨损或积雪覆盖而变得模糊或缺失,导致LKA系统无法有效识别车道边界。 | LKA系统无法识别车道线,功能无法正常运行,甚至可能导致车辆偏离车道。 |
| 车道线被覆盖:如积雪、污物或其他障碍物遮挡了车道线,系统无法获取车道边界信息。 | 车道保持功能失效,LKA无法正确判断车道线,导致安全风险增加。 |
总 结:
车道保持辅助系统(LKA)是现代车辆中不可或缺的安全技术之一。它不仅能够提高驾驶员的驾驶安全性和舒适性,还为未来的自动驾驶技术打下基础。随着技术的不断进步和完善,LKA系统将在各种复杂的驾驶环境中发挥更大的作用,推动汽车行业向着更加智能化、自动化的方向发展。然而,系统的环境适应性、传感器精度和法规监管等问题仍需进一步解决,以确保LKA技术的普及和安全应用。
1.Lane Keeping Assist System (LKAS) | HR-V 2024 | Honda Owner's Manual
2.Honda | Lane-Keep-Assist-System
3.What is lane keep assist? - carsales.com.au
4.kia.com/content/dam/kia2/in/en/content/ev6-manual/topics/chapter6_16_3.html
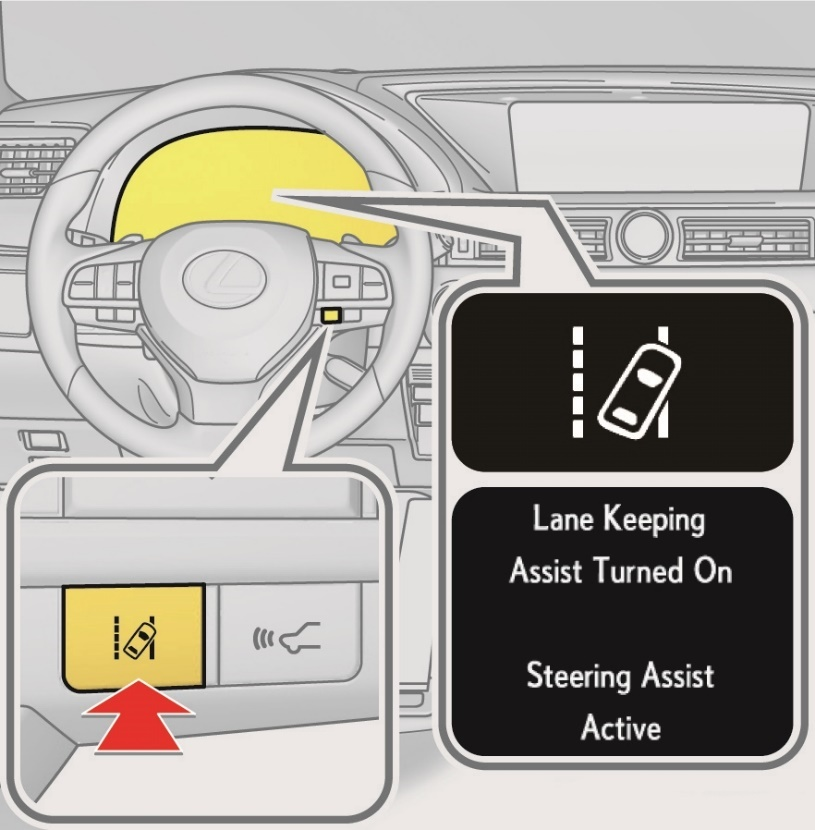
5.Lexus Safey System+ Settings | North Park Lexus at Dominion
6.Lane Keeping Assist System (LKAS): My Car Does What