


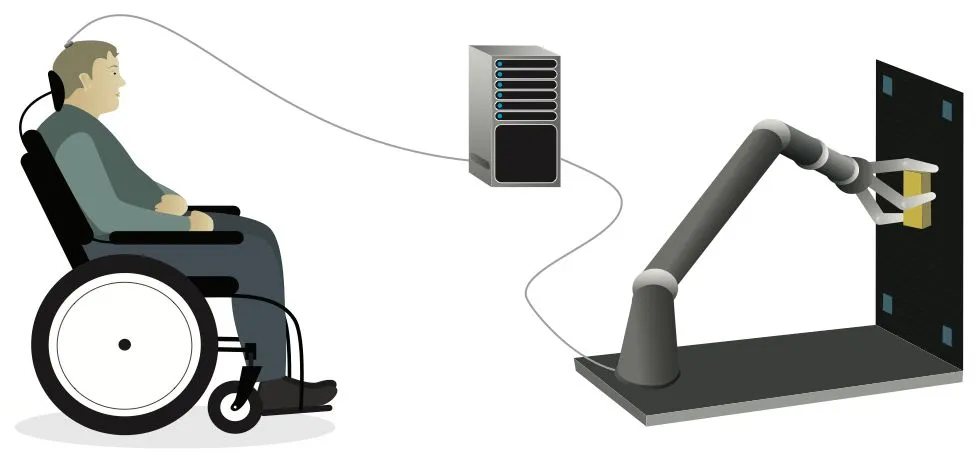
加州大学旧金山分校的研究人员使一名瘫痪男子能够控制一个机械臂,该机械臂通过计算机接收来自大脑的信号。
他能通过想象做一些动作来抓取、移动和放下物体。
技术实现依赖于一个与AI模型融合的脑机接口设备。其AI模型能自适应大脑活动的微小变化,当患者反复想象某个动作时,AI会逐步优化解码精度,实现更自然的操控。
据悉,该脑机接口设备在无需调整的情况下创纪录地稳定运行7个月,此前,同类设备仅能维持一两天。
"这种人类与AI学习的深度融合,正是脑机接口技术发展的下一阶段。"加州大学旧金山分校神经学教授Karunesh Ganguly医学博士表示,"这就是我们实现复杂、逼真的功能所需要的突破。"
图源:UCSF | 侵删
这项研究的关键突破在于发现了人类大脑活动模式的动态变化规律——当瘫痪患者反复想象特定动作时,其对应的大脑信号会随时间发生微妙偏移。
研究团队通过AI算法成功捕捉并适应了这种变化,使脑机接口得以长期稳定工作。
Ganguly教授通过动物实验首次观察到:动物在学习新动作时,大脑运动皮层的活动模式会持续重组。
Ganguly教授怀疑同样的事情也发生在人类身上,这就是为什么传统脑机接口快速失效的原因——固定解码算法程序无法适应神经信号的自然偏移。
图源:UCSF | 侵删
Ganguly教授与一名多年前因中风而瘫痪的参与者合作。瘫痪者的大脑表面植入了微型传感器,当他想象移动时,这些传感器可以捕捉到大脑活动。
虽然瘫痪者实际上不能移动,但当他想象自己在做运动时,他的大脑仍然可以产生运动信号。脑机接口通过大脑上的传感器记录下大脑活动模式的特征。
结果显示,即使参与者每天想象相同的动作,大脑活动模式也会略微变化。
在为期两周的训练中,Ganguly教授指导这位瘫痪患者持续想象手指、手掌和拇指的简单动作,同时通过植入的微型传感器记录其脑部活动数据来训练AI系统。然而,当患者首次尝试操控真实机械臂时,动作精度仍不尽如人意。
随后,Ganguly教授让患者在虚拟机械臂上练习,该虚拟机械臂提供可视化的准确性反馈。最终,患者在虚拟机械臂上准确完成了各项任务。
当患者开始使用真正的机械臂进行练习,他只需要几次练习就可以把虚拟机械臂上习得的技能,转移到现实机械臂中。
他可以用思维操控机械臂拾取积木,转动它们并将它们移动到新的位置。他甚至能够打开一个柜子,拿出一个杯子,把它举到饮水机上。
Ganguly教授正在计划改进脑机接口AI模型,使机械臂移动得更快、更平稳,并计划在家庭环境中测试脑机接口。
对于瘫痪的人来说,能够自己吃饭或喝水将极大改善生活质量。
“我非常有信心,我们现在已经学会如何构建系统,并且让它发挥作用。” Ganguly教授说。
