


混合动力系统就是使用了汽油、柴油、氢气或甲醇的内燃机和电力2种驱动方式的系统。其优势在于车辆起步用电机实现驱动,发动机可以完全不用工作,处于停机状态,当车速达到一定值后,发动机再进行接入。这样的好处是:
(1)发动机省去了怠速工况;
(2)发动机一旦运行,就会在运行在最高效的区域。混合动力车辆起步动力性良好,可以达到节能减排的目的。
客车是公共交通领域的重要组成部分,该细分市场的特点是对安全性要求较高,且产量不大,因此针对客车混合动力系统与乘用车构型的思路不完全一样。混合动力客车经过十多年的发展,动力系统构型也是呈现多样性,但每种构型都有其自身的优点和缺点。
本文总结了现有客车市场比较主流的串联式、并联式和混联式动力构型方案,分析了这3种构型的控制原理和优、缺点,提出了不同系统构型产品市场路线,为混合力客车推广提供了思路。
2 混合动力客车构型分类
混合动力动力系统构型有2 种不同的分类方法,即按连接方式和按混合程度,本文重点按连接方式的分类方法进行详细阐述。
2.1 按混合程度划分
该种分类方法按电能与传统能源的混合程度,即驱动电机输出功率占整个动力系统功率的比例来进行划分,具体见表1。
表1 混合动力构型按混合程度分类

该种方法按动力系统的连接方式和结构类型进行划分[2],具体如表2。
表2 混合动力构型按联接方式分类

串联式系统:有发电和驱动2个电机,其中发电机不做驱动使用,仅用来发电,发出的电能可存储在动力电池中或供驱动电机直接使用。
增程式系统:与串联式系统类似,通过将电机集成在发动机飞轮上,形成发动机和电机总成,这种总成称为增程器;其中,增程器不直接连接传动系统,与串联式系统类似,其主要功能就是在动力电池电量不足时给其充电,从而延长续驶里程。
并联式系统:发动机为主要动力源,电机作为辅助动力源。该方式以发动机驱动为主,利用驱动电机低速大转矩的特性,在驾驶员需求动力较大时、或者说需要发动机瞬态大扭矩输出工况时,用驱动电机辅助驱动的方式来降低燃油消耗。这种方式的结构相对比较简单,只需要在传统动力车型上增加驱动电机和动力电池。
混联式混合动力系统:混联式综合了串联和并联的优点,其运行模式也可以分为串联模式、并联模式和混联模式,与并联式系统相比,混联式系统可以根据工况灵活的调整发动机和电机输出动力的比例,一方面,保证各自系统运行在高效率区;另一方面,确保了系统在不同的工况下实现最优的动力匹配。但此构型连结方式系统复杂,对控制要求较高,成本也较高。
3 混合动力客车常见构型分析
以下对客车领域混合动力系统常见动力构型、每种构型的特点以及适合其销售的市场进行分析和讨论,本文按连接方式分类的方法进行展开讨论。
3.1 串联式/增程式
串联式混合动力客车系统一般由一个发动机、2个电机及传统装置组成,其中2 个电机中,一个电机用来发电,称为发电机;另一个电机用来驱动车辆,称为驱动电机。对于其他车型,也有在驱动电机后端再加入变速器的配置,但在客车领域,由于考虑成本、可靠性和应用场景,一般不考虑在电机后面加入变速器。
发电机和发动机通过减振器或传动带的方式连接在一起。其中,发动机仅用于带动发电机发电,不直接驱动车辆行驶,串联式系统特点如表3。
表3 串联/增程式混合动力系统分析

3.1.1 工作模式
(1)驱动:控制系统解析驾驶员加速踏板需求功率,控制驱动电机输出驾驶员需求功率,驱动车辆行驶。
(2)发电:当检测到动力电池电能低于一定值,控制系统通过控制发电机拖动发动机起动,判断发动机起动成功后,一方面控制发动机目标转速至高效率区,另一方面控制发电机负向转矩实现发电。
(3)制动:控制系统解析驾驶员制动踏板动力需求,控制驱动电机负向输出转矩,从而实现车辆的能量回收。
3.1.2 串联式
按系统构型分为BSG 和ISG 2 种结构,BSG 结构电机通过传动带连接发动机,ISG 结构电机通过扭振减振器或飞轮连接发动机[4-5],2 种构型分别如图1 和图2所示。

图1 BSG电机串联式系统

图2 ISG电机串联式系统
对于BSG 电机串联式系统,该种系统的缺点是:一方面,传动带会产生打滑情况,影响能量传递效率;另外,在拖动发动机过程中容易存在异响,NVH较差。对于ISG 电机串联式系统,发动机和电机之间通过扭振减振器或飞轮同轴连接,该种连接方式较BSG方式传递效率高[6]。
3.1.3 增程式
增程式系统(图3)与串联式系统类似,本文将其归类为串联式系统的一种。该系统的特点是将发动机和发电机集成为一个增程器,发动机与发电机实现了集成化,其效率较ISG 串联系统的基础上有了进一步的提高。该种方式有一个增程器控制单元,专门负责增程电机和发动机的控制,该控制单元根据整车控制单元的需求统一协调发动机和发电机的能量分配,能够最大限度的提升发动机和发电机系统的效率。

图3 增程式系统
3.1.4 串联系统分析及适用市场
能耗方面,客车的串联式系统在一般中低、速的城市工况相比传统动力系统有一定的节油优势,节油率大约25%左右;但在城乡和高速工况下,相比传动动力系统没有优势,甚至比传统动力系统更差;另外,由于没有变速机构,不适合爬坡和高速工况。
综上,系统更加适用于中、低速工况,适用平原城市公交市场。
3.2 并联式
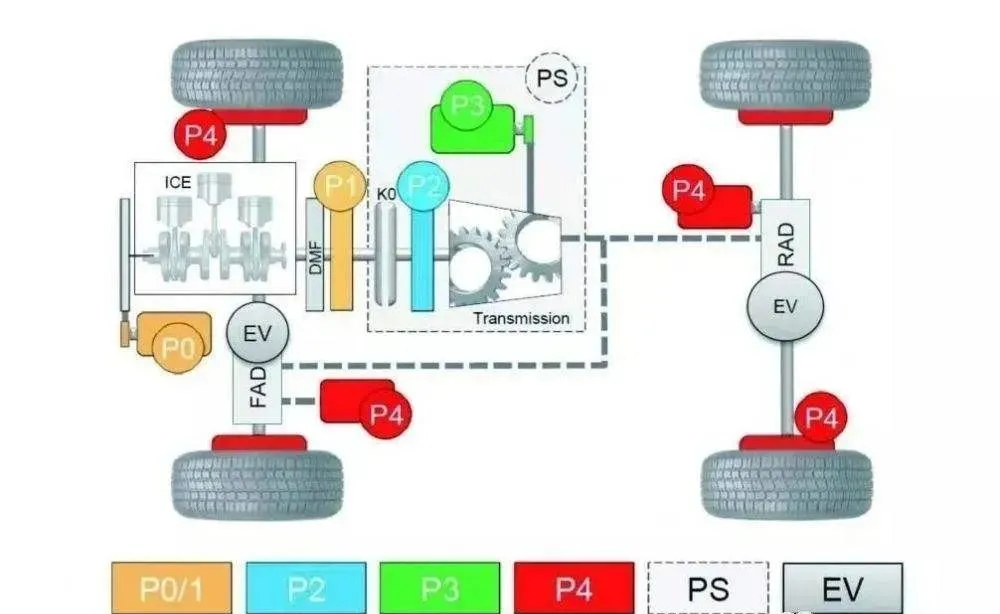
并联式混合动力客车系统[7]一般由1个发动机、1个电机、1个离合器、1个变速器组成[8],该电机既可以实现驱动也可以实现能量回收。该种系统电机所在的位置很关键,目前业内分类方式是按电机放置的位置进行分类,其中P 的定义就是电机的位置(Posi⁃tion),P2:电机安装离合器与变速器之间;P3:电机位于变速器输出轴[9];并联式系统的特点如表4。
表4 并联式混合动力系统分析表

3.2.1 工作模式
(1)纯电驱动:在中、低车速情况下,发动机停机,控制系统解析驾驶员加速踏板动力需求,控制驱动电机输出驾驶员需求动力,驱动车辆行驶。
(2)并联驱动:当车速大于一定值后,通过电机起动发动机,利用发动机和电机共同驱动整车行驶,此时当驾驶员需求动力较大时,电机可以驱动对车辆进行助力。
(3)燃油驱动:该模式下电机不参与驱动整车,下面两种情况会进入该模式:
①由于电机在高转速效率较低,当车速高于一定值,为保障车辆的经济性,利用发动机单独驱动车辆行驶。
②当车辆电驱动系统故障情况下,车辆可以依靠发动机单独驱动车辆正常行驶。
(4)发电:
①驻车发电:驻车情况下,当检测到动力电池电量低于一定值,通过控制电机拖动发动机起动,控制系统判断发动机起动成功后,一方面控制发动机目标转速至高效率区、另一方面控制电机负向转矩实现发电;
②行车发电:发动机驱动车辆行驶过程中,当动力电池电量低于一定值且驾驶员需求功率较小时,控制电机负向输出转矩实现发电。
(5)制动:此时发动机停止驱动,可选择控制发动机停机,解析驾驶员制动踏板动力需求,控制驱动电机负向输出转矩满足制动动力需求,从而实现车辆的能量回收。
3.2.2 P2系统分析及适用市场
该种构型(图4)电机置于变速器输入轴,这样布置的优势是电机可以利用变速器的减速、增扭作用,自身体积可以做的不必那么大,相对较小的转矩即可满足车辆驱动需求,降低了电机和整车成本;但这样布置的不足是在变速器换挡挡过程中必然会存在动力中断,影响驾驶感受。

图4 P2系统构型
相对串联式系统,在能耗方面,P2 构型在中、低速城市工况与串联式系统差不多,节油率一般为25%左右;由于配置变速器,即使在高车速情况下,也可利用换挡机构一方面保证发动机始终运行在高效率区,另一方面保证电机转速不至于过高,影响电机效率。因此,在城乡和高速工况节油率一般为15%~20%左右。
综上,相对于串联式系统而言,该系统更加适用于高速工况,适用平原地区城际、长途客运和城市公交市场。
3.2.3 P3系统分析及适用市场
该构型(图5)电机置于变速器输出轴,这样布置的优势是在变速器换挡过程中,电机可以正常行驱动车辆行驶,没有动力中断;不足之处是电机无法利用变速器的减速、增扭作用,系统动力匹配需要考虑最高车速和最大爬坡度的兼顾,需要选用较大转矩容量的电机,电机的选型会造成整车成本的增加。

图5 P3系统构型
同样,P3 构型在中、低速城市工况能耗方面与串联式系统差不多,节油率一般为25%左右;在高车速情况下,也可通过换挡机构保证发动机始终运行在高效率区。相对于P2系统,由于电机在变速器后端,其优势是在变速器换挡过程中没有动力中断;不足是在高速工况下电机转速往往较高、电机弱磁消耗较大,效率低,因此,在城乡和高速工况节油率相对较低,一般为10%~15%左右。
综上,相对P2 系统,该系统更加适合爬坡工况,适用于山区和平原地区城市公交市场。
3.3 混联式
混联式系统一般由发动机、2个电机、离合器和变速器组成,该种系统兼顾了串联和并联式的优势,系统结构相对串联和并联式更复杂,可以实现串联和并联两种工作模式,混联式系统的特点如表5。
表5 混联式混合动力系统分析

3.3.1 工作模式
(1)纯电驱动:在中、低车速情况下,控制系统解析驾驶员加速踏板动力需求,控制驱动电机输出驾驶员需求的动力,驱动车辆行驶。
(2)串联模式:在纯电驱动行驶模式下,当电池电量低于一定值时,通过发电机可以拖动发动机起动,起动成功后,依靠发电机输出负转矩实现给动力电池充电,车辆可以实现边驱动、边发电。
(3)并联驱动:当车速大于一定值后,通过发电机拖动发动机起动;起动成功且转速同步后,控制离合器结合;当离合器结合后,利用发动机和驱动电机共同驱动整车行驶。该模式下,控制系统会检测动力电池电量,当电量低于一定值后,控制电机负向输出转矩实现发电[10]。
(4)制动:解析驾驶员制动踏板需求动力,控制驱动电机负向输出转矩,从而实现车辆的能量回收。
3.3.2 双电机直联系统分析及适用市场
是混联系统的一种,属于深度混合动力系统,该种系统传动系统由发动机、离合器、2 个电机机械直连;同样,与串联系统类似,该系统也是分为BSG 和ISG 2 种连接方式,2 种方式的优缺点前文中已说明,不再赘述,其系统构型分别如图6和图7所示。

图6 双电机直联BSG系统构型

图7 双电机直联ISG系统构型
该系统的优势是没有变速机构,结构相对简单,传动效率高,控制也相对简单:通过控制离合器的分离与结合,实现纯电、串联模式向并联模式的转换,可以实现串联和并联2 种模式。发动机的起/停可通过发电机带动实现。由于没有变速机构,该系统有如下不足。
(1)发动机转速与车速无法解耦,发动机工作点可调空间有限(只能通过电机适当调整),在发动机驱动情况下,发动机工作区域效率低,经济性差;
(2)最大爬坡度有限,不能适应山区;
(3)不适合高速工况。
能耗方面,由于该系统属于深度混合动力系统,在中、低速工况下,节油率方面较串联式和并联式都高,一般30%左右,但由于没有变速机构,不适合爬坡和高速工况,适用平原城市公交市场。
3.3.3 双行星排系统分析及适用市场
该系统同样由发动机、2 个电机和双行星排等部件组成[11],相比双电机直联系统省去了离合器机构,加入了双行星排结构作为变速机构。发动机连接前排行星架、发电机连接前排太阳轮、前排齿圈与后排行星架连接、后排齿圈锁死、后排太阳轮连接驱动电机[12],具体构型如图8 所示。

图8 混联双行星排系统构型
该构型优势是发动机转速与车速解耦,可以通过控制发电机转速和转矩将发动机始终控制在高效区内。不足之处是由于没有离合器机构,发动机起/停机时,振动噪音较大、车辆存在顿戳感,在驾驶习惯不好的情况下(发动机驱动时,频繁松/踩加速踏板),会存在发动机频繁起/停的情况。由于驱动电机连接在变速器后排输出轴[13],高速情况下,无法避免电机转速过高,电机弱磁消耗依然较大,效率低。
能耗方面,由于该系统属于深度混合动力系统,在中、低速工况下与双电机直联系统类似,节油率一般30%左右。较双电机直联系统而言,更适合爬坡工况,不适合高速工况,适用于平原或山区城市公交市场。
3.3.4 带变速器双行星排系统分析及适用市场
该系统在混联双行星排系统[14]基础上,在驱动电机后面加了一个低挡变速器[15],具体构型如图9所示。

图9 混联双行星排变速器系统构型
变速器的加入可以保障在其高速工况下,避免上述双行星排系统电机高速弱磁大、效率低的问题,这样电机和发动机的都可以在高效区运行。其缺点就是系统有2套变速机构,控制复杂,可靠性和成本均会有所降低。
该系统在城市工况下,与前面两套混联式系统类似,节油率都为30%左右,高速工况下节油率也可达到15%~20%左右,其适用性较前面几套系统都要更强,不仅适合山区大爬坡度工况也适用于高速工况。适用各种车型需求:平原城市、山区城市、城际公交市场、长途客运市场。
4 结论
不同的混合动力系统构型,其成本、可靠性、动力性、经济性、工况适应性均存在差异,不同构型都有各自的优势和不足。本文的研究结果对不同细分市场的混合动力客车系统选型与设计有一定指导意义。在产品布局时,可参考本文思路,根据车辆用途和客户需求有针对性的进行系统设计。

扫描二维码|关注我们 ● 电动车千人会 ● | 扫码关注智能汽车 ● EVH1000智能汽车 ● |
欢迎加入新能源汽车产业交流群
关注公众号后台回复关键词“社群”
即可获取入群方式


