


地平线发展历程

地平线智能计算架构演进路线
回溯地平线的技术起点,首代BPU(BernoulliProcessingUnit)智能计算架构在2016年横空出世。它通过专门设计的硬件加速单元和定制指令集,将深度学习网络的矩阵乘加运算高效并行化,实现了车载环境感知与决策所需的低功耗、高性能计算。与通用GPU相比,BPU在同等功耗下的算力密度更高,同时能够通过硬件级别的资源调度,最大化算法在芯片上的执行效率,这一创新为后续算法迭代提供了坚实基础。
随着自动驾驶算法的不断升级,地平线在2020年和2021年先后推出了Bernoulli 2.0与Bayes 2.0架构。在微结构层面,这两代BPU通过优化流水线深度、扩展向量单元宽度以及改进片上缓存设计,使得每TOPS算力的能效比提升了10%至15%,并在同等功耗约束下,进一步提高了算力输出。这一阶段的架构演进,主要针对ADAS算法帧率的提升和更高精度的目标检测需求,保证了系统在执行多路摄像头与雷达数据融合时,依然能够保持实时性和能耗控制。
真正实现跨越式进化的是2023年发布的“纳什”(Nash)架构。它针对大参数Transformer模型做了深度软硬件协同优化:硬件层面将乘加单元从16×16升级至32×32,引入稀疏张量处理引擎以支持Sparse4D算法的高效执行;软件层面则与编译器、性能分析器紧密配合,通过硬件级指令预测与算法级流水线融合,实现数据加载与计算的并行调度。实验结果表明,与首代BPU相比,整体计算性能提升约246倍,而对于Transformer推理的加速效果则超过27倍,远超同期摩尔定律18个月翻一番所能达到的16倍增长,真正拉开了国产车规级AI芯片与通用解决方案之间的性能差距。

BPU专用智能计算架构

地平线车载智能计算方案演进路线
在BPU架构持续进化的同时,地平线基于该架构打造了梯度化的“征程”系列车载智能计算方案,以满足从基础ADAS到高阶自动驾驶的多样化需求。2019年首发的征程2芯片,以4TOPS算力和2W功耗,满足L0至L2级别的主动安全与辅助驾驶应用;2020年面世的征程3将算力提升至5TOPS,支持L2+与初级L3功能;2021年问世的征程5更是一举将算力推升至128TOPS,并配备30W功耗管理,在理想L8等量产车型上实现了对高分辨率多路摄像头与毫米波雷达数据的实时处理,开启了国产大算力智驾时代。

征程2、征程3、征程5芯片情况
2024年4月,征程6系列横空出世,其算力区间覆盖10TOPS至560TOPS,且全部基于纳什架构设计,不仅在性能上较前代大幅跃升,更通过平台化设计和功能安全保障(满足ASILB/D与ASILDMCU标准)实现了对低、中、高阶智能驾驶场景的一站式覆盖,使得整车厂仅需一套软硬件与工具链即可快速对接并完成差异化功能开发与工程落地。
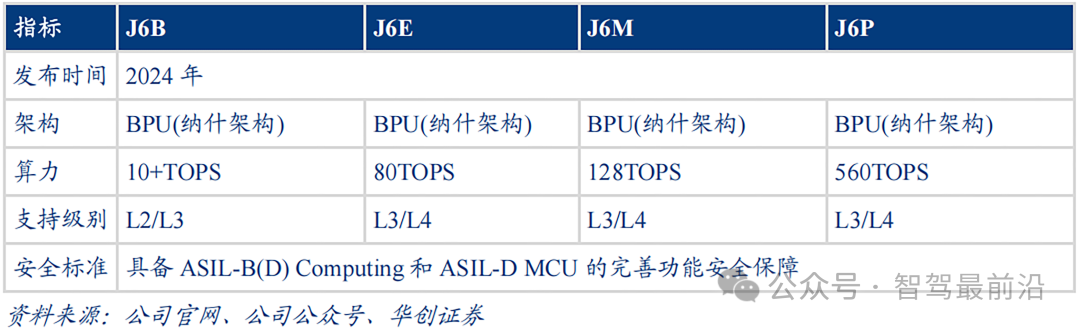
征程6系列芯片

地平线自动驾驶技术方案
在算法层面,地平线自2016年提出端到端自动驾驶感知演进理念以来,始终在感知、预测、规划与控制领域保持技术领先。针对激光雷达数据的高度稀疏性,地平线在2022年提出Sparse4D端到端感知算法,通过时空稀疏张量编码,将多帧点云与摄像头图像进行深度融合,不仅提升了对小目标和远距离障碍物的检测精度,还减少了计算量。在此基础上,2023年地平线发布了UniAD大模型,并荣获CVPR最佳论文奖。UniAD将感知、预测、规划与控制有机融合,通过交互博弈机制模拟多车、多行人场景中的行为决策,实现了在复杂交叉口与变道场景下的高效通行与安全保障。该模型在BPU纳什架构上更能够以50ms以下延迟完成全场景推理,真正满足了高阶自动驾驶对实时性的严苛要求。
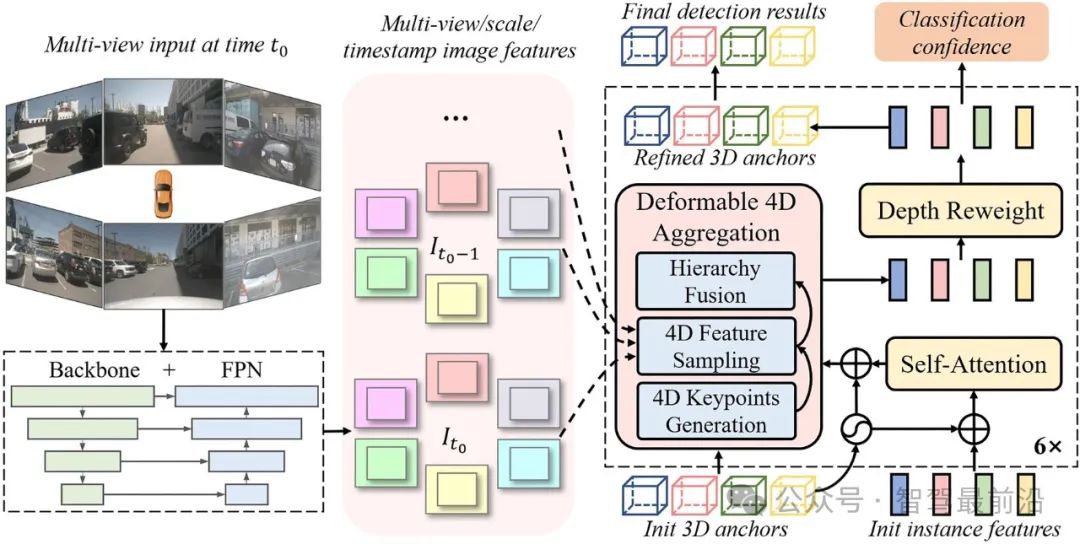
Sparse4D算法框架图
为了让上述算法快速转化为可量产的功能,地平线还构建了覆盖算法研发到软件部署的完整技术栈。其核心工具包括“天工开物”算法开发链,它集成了模块化算法库、可视化调试界面与自动化测试框架,使得算法工程师能够在几分钟内完成从代码编写到BPU硬件验证的闭环;“踏歌”嵌入式中间件提供车规级操作系统接口、传感器抽象层与安全监控服务,加速整车集成与功能验证;而“AIDI艾迪”软件平台则支持模型管理、数据标注、OTA升级与版本控制,确保了算法迭代的高效闭环与量产可控。这一整套工具链不仅降低了开发门槛,也使得整车厂和一级供应商能够在半年内完成从算法验证到车辆上路的全流程,大幅提升了新功能的商业化速度。
在产品应用层面,地平线已形成Horizon Mono、Pilot与SuperDrive三大梯度化解决方案。Mono方案基于单目摄像头,搭载征程2或3芯片,自2021年量产以来,已在AEB、ACC与交通拥堵辅助等基础辅助场景中获得稳定验证;Pilot方案在此基础上融入毫米波雷达与自动泊车功能,搭载征程3或5芯片,2022年起在多款车型上实现量产,可在典型高速公路场景下实现超200公里的无感接管体验;而面向最具挑战的城市复杂路况,SuperDrive方案将摄像头、雷达与激光雷达进行深度融合,计划于2026年量产,嵌入征程6系列芯片,旨在实现全天候、多场景下的流畅拟人化驾驶。
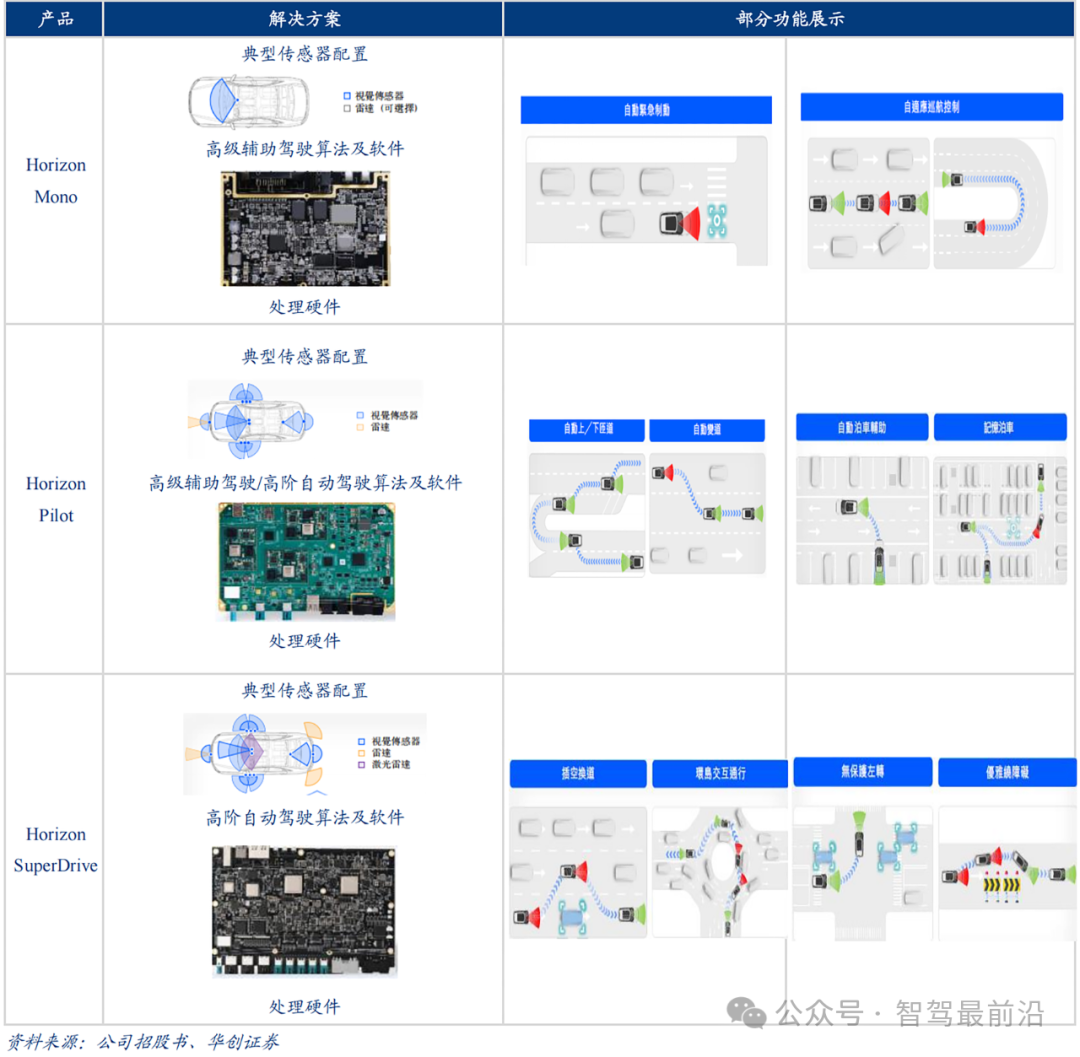
不同智能驾驶解决方案
截至2024年,征程6系列已获超过20家整车厂平台化采用,合作伙伴涵盖自主品牌、新势力与合资品牌,2025年或将赋能超100款中高阶智驾车型。平台化设计使得整车厂仅需对接一套软硬件与工具链,便可覆盖低、中、高阶场景的开发与部署,大幅缩短项目周期并降低工程成本。同时,地平线还与生态合作伙伴在感知算法、地图融合、仿真测试等领域开展深度协作,共同构建开放、高效的智能驾驶生态。
随着法规对L3+至L4级自动驾驶的逐步放开,以及商业模式的不断成熟,智能驾驶系统将面临更高的安全性与可靠性要求。地平线下一阶段的技术攻坚方向包括进一步压缩大模型推理体积与延迟,以满足毫秒级车规部署需求;探索纯视觉与多传感融合的最佳实践,提升在无激光雷达方案下的城市复杂场景鲁棒性;强化多传感器冗余与故障自诊断机制,构建更为严苛的功能安全闭环;并在开放生态中持续推动软硬件协同创新,为行业带来更安全、更高效、更智能的出行体验。通过这一系列技术与产业化实践,地平线机器人正一步步从“追随者”向“领跑者”迈进,助力中国智能驾驶在全球赛道上实现弯道超车。
编者语:「智驾最前沿」微信公众号后台回复:C-0743,获取本文参考报告:《地平线机器人:蓄势待发,眺望地平线的智驾芯“征程”》pdf下载方式。
-- END --

