

在当今科技飞速发展的时代,全球竞争日益激烈,科技实力成为国家综合国力的关键体现。自动驾驶技术作为前沿科技领域,对于国家发展有着重要意义。
渡众自动驾驶车车对抗赛,旨在激发科技人才的创新热情和爱国情怀。通过这样的比赛,鼓励科研人员和学生投身于人工智能、机器人、自动化、计算机、汽车等相关专业的人才培养方案、课程体系、实验实训条件等方面的建设,提升我国在该领域的技术水平,增强科技竞争力。同时,比赛也将培养出更多掌握先进技术的人才,为国家发展储备力量,用科技捍卫国家尊严,为民族复兴助力。
1、本赛项面向全国全日制在校研究生、本科生和职业院校学生。
2、本赛项为团体赛形式,每支参赛队由不超过5名学生(其中最多1名研究生)和不超过2名指导教师组成。
3、所有参赛队必须以学校为单位进行报名,不得跨校组队。比赛分本科和职业院校两个组别,报名时须明确参加的组别。
4、所有参赛队选手所提供的个人信息必须真实、准确、有效,否则取消参赛资格,参赛队伍报名成功后,不得调整和更换参赛队员。
报名请登录渡众机器人公司官网-智能汽车竞赛专区,网页:https://www.bjdzrobot.com/smartcar.html
点击网页内的车车对抗赛报名入口按钮开始报名,报名截止时间2025-06-15日

比赛分为两个阶段:分区赛和国赛阶段。分区赛采用单循环小组赛赛制,国赛阶段采用淘汰赛制。
1) 分组:根据队伍数量随机抽签平均分成2组或3组,比如共15只队伍,分成 3 个小组,每组 5 支队伍。最终分组数根据报名队伍数量调整
2) 循环赛制:小组内的队伍进行BO1单循环比赛,即每支队伍都要与小组内的其他队伍进行一场比赛。
3) 积分规则:根据胜场数排名,胜场数相同比较相互胜负关系,若还相同则需要加赛。比赛结束后,计算各小组队伍的积分,以确定小组排名。
4) 小组出线:按照出线队伍总和占总队伍数量25%-30%比例出线,晋级到国赛阶段。
以32支队伍为例说明。
A第一轮(十六强赛,BO3)
1) 分组抽签:32 支队伍通过抽签分成 16 组,两两对决。为保证公平,抽签过程应透明且有监督,尽量使各小组实力均衡,避免强队过早相遇。
2) 比赛进行:16 组队伍同时进行 BO3(三局两胜制)比赛,共 16 场 BO3,获胜的 16 支队伍晋级八强。
B第二轮(八强赛,BO3)
1) 重新抽签:16 强晋级的队伍重新抽签,分成 8 组。
2) 比赛开展:8 组队伍进行 BO3(三局两胜制)比赛,共 8 场 BO3,获胜的 8 支队伍晋级四强。
C第三轮(四强赛,BO3)
1) 抽签对阵:八强晋级的队伍抽签决定对阵情况,两两一组。
2) 比赛实施:4 组队伍进行 BO3 比赛,共 4 场 BO3,获胜的 4 支队伍进入下一轮。
D第四轮(半决赛,BO3)
1) 对阵安排:四强队伍两两对决。
2) 比赛进行:2 组队伍进行 BO5 比赛,共 2 场 BO3,获胜的 2 支队伍晋级决赛,失败的 2 支队伍争夺季军。
E第五轮(决赛,BO3)
1) 冠军争夺:半决赛获胜的两支队伍进行 BO3 比赛,共 3场比赛,决出冠军和亚军。
本次比赛是红蓝双方智能车在规定场地上的攻防对抗类比赛。红蓝双方全自动驾驶小车通过完成穿越障碍、物资抢占、动态打靶、相互攻击等任务,制定自己的战术和策略,得分多或将对方血量耗尽的一方获胜。双方小车可以通过云台上的激光发射器对敌方车身前后左右的激光接收靶进行攻击以消耗对方血量和得分。
A. 物理环境比赛场地
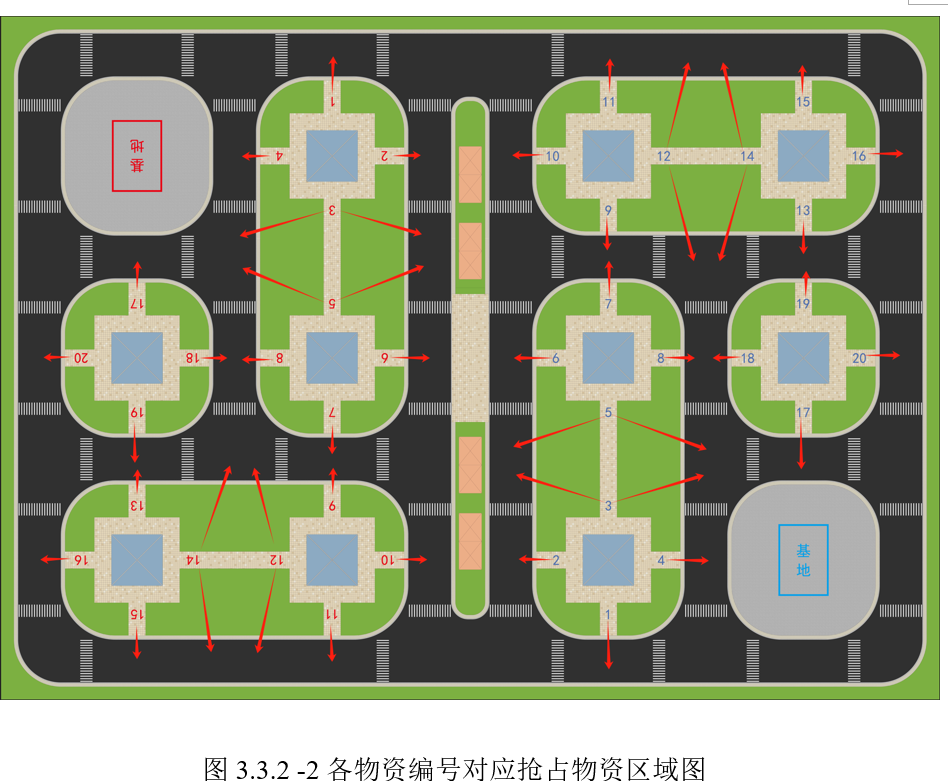
本次比赛场地为 5.5×4 米的城市场景,呈对角线对称的长方形场地,中间有 4 块 40×15 厘米的隔离带掩体将场地左右平分。红蓝双方每块区域为四横三纵的单车道道路,每侧都有 5 块物资识别区域与一块基地区域,其中数字1、2、3…20是可能放置物资的位置编号。单车道宽 25 厘米,营造出较为真实的对战环境,为参赛选手的智能汽车提供了具有挑战性的行驶空间。
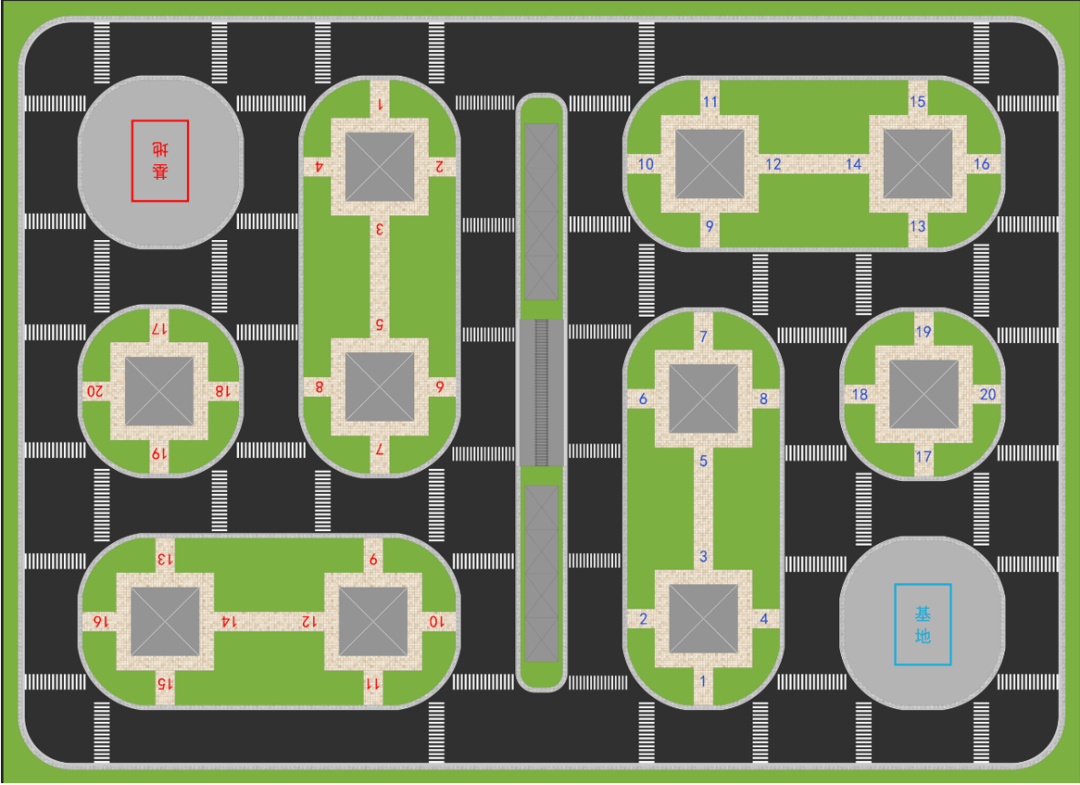
▲ 图3.2.1 比赛场地示意图B. 赛场环境
智能机器人比赛场地为无磁场干扰环境。地图由刀刮布绘制而成。考虑到竞赛场地环境可能存在表面不平整、边框上有裂缝、光照条件有变化等因素,各参赛队在设计智能机器人时,需要考虑各种环境下的应对措施。
C. 物资位置
双方场地标有数字1、2、3…20是可能放置物资的位置编号。
D. 围挡搭建说明
围挡拼搭请注意挡板尺寸大小和拼搭顺序
(1) 收到货请确认围挡数量为:
【17厘米长*35厘米高】的挡板共计5片(其中1片备用);
【35厘米长*35厘米高】的挡板共计52片(其中2片备用);
【45厘米长*35厘米高】的挡板共计52片(其中4片备用);
卡扣(4个装)4*30组共计120个(其中16个备用)
围挡由多片挡板和多个卡扣拼搭而成。
先拼整个地图的四边,地图长5.5米,宽4米;
再拼10个正方体楼宇(长宽高皆为35厘米);
再拼两个小的长方体掩体(长90宽17高35厘米),
最后在整个地图外围的每条边外增加两片围挡加固作为支撑。
围挡搭建详细说明如下:
(1) 地图的长边为5.5米,由12块【45厘米长*35厘米高】的围挡片拼搭而成;
(2) 地图的短边为4米,由8块【45厘米长35厘米高】+1块【35厘米长35厘米高】的围挡片拼搭而成;
(3) 楼宇由10个正方体组成(蓝方5个+红方5个),每个楼宇由4块【35厘米长*35厘米高】的围挡片拼搭而成;
(4) 地图中间有两个小的长方体掩体,每个长方体(901735)是由2块【17厘米长35厘米高】+4块【45厘米长35厘米高】的围挡片拼搭而成;
(5) 剩余的围挡可以随机固定在最外围的四条边的卡扣上,用于加固整个围挡。
在分赛区选拔赛及全国总决赛,将采用如下所示的SmartMaster智能小车作为对抗车模。
SmartMaster智能小车套件产品外观:
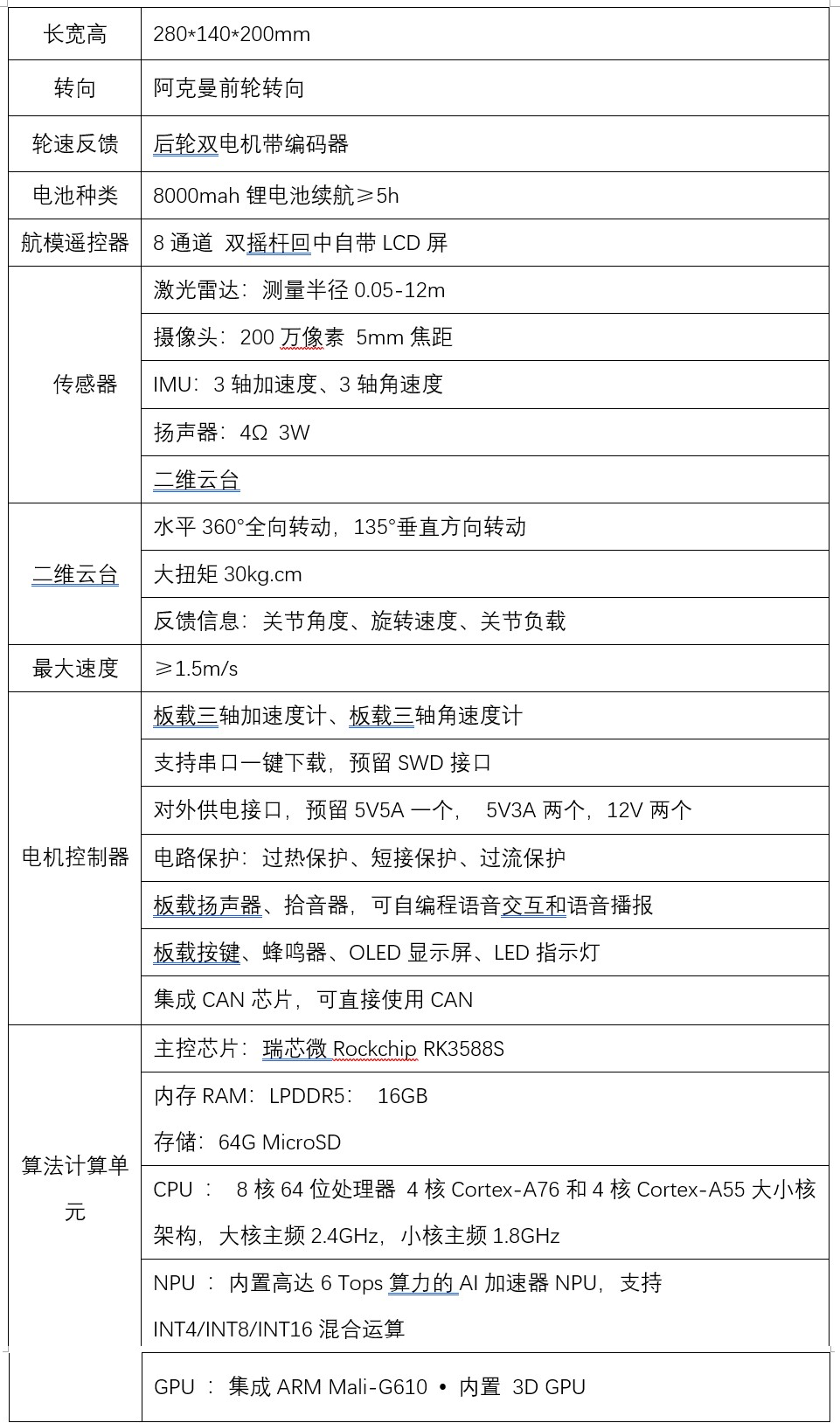
车模检测:开赛前裁判对参赛队伍的车模进行合格性检测,包括表面贴涂情况、裁判系统网络连接情况、激光发射和激光接收靶工况以及遥控器连接情况等。检测完毕后,将车模交给参赛队员。
参赛队员根据各自为红方或蓝方切换车模激光接收靶颜色。
设置红蓝双发IP地址,车载裁判系统和裁判端裁判系统进行IP绑定,确定红蓝双方IP和端口号。
电子外设:鼠标、键盘、显示器、头戴式耳机、音响、打印机、手机
交通常用工具:扳手、螺丝刀、手电钻、钳子、万用表、示波器、电烙铁、卷尺
手写体的数字:参赛选手或志愿者现场写的数字(范围0-99)。
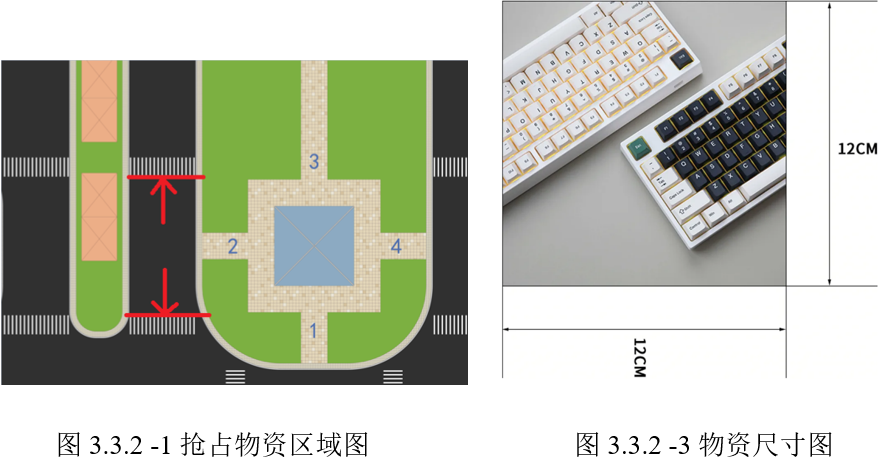
图片目标为彩色打印或者喷涂有用于识别的图片,图片不再有黄色边框,均为无框图片,图片边长为12cm,如下图3.3.2 -3所示。
比赛结束与获胜条件:
平局:在比赛过程中,如果出现平局的情况,即到达比赛时间且双方得分相同,则需要加时2分钟,加时阶段,双方血量恢复,且各有20发子弹;平局阶段,不抢占物资,仅进行双方互打。(准备时间两分钟,然后进入加时2分钟阶段)
裁判系统分为车端和裁判端,旨在精确、公平地评判比赛过程中的各种行为和状态,保障比赛的顺利进行。车端裁判系统位于车后端且自带 WiFi,与裁判端协同工作,确保比赛信息的准确采集和处理。
裁判系统具体使用请参考文档“SmartMaster裁判系统操作指南”。
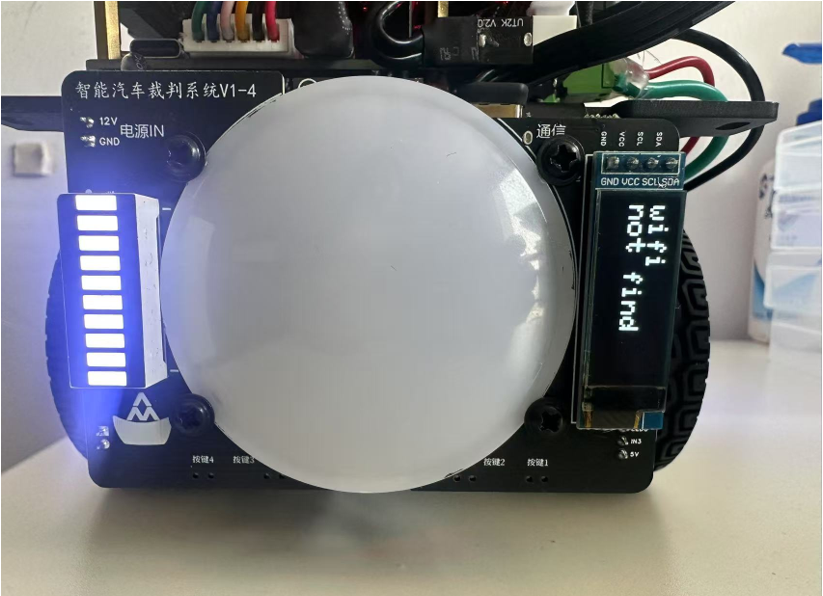
▲ 图3.4.1 车载裁判系统正面1. 生成物资编号
1) 裁判端:随机生成红蓝方对称位置的各 4 个物资编号,并将这些编号信息发送至大屏幕显示系统,为参赛队伍规划路径提供依据。
2. 物资抢占判定
1) 裁判端:抢占物资完成后(详见3.3.3),裁判判定物资完成的情况下,判断在裁判系统裁判端进行操作,给抢占物资完成的队伍下发相应的子弹。
2) 车端裁判系统:获取裁判端下发的子弹数,对裁判端实际子弹个数进行更新。
3. 车车对打监控
1) 车端裁判系统:算法计算单元通过uart串口按照指定通信协议给车载裁判系统发送指令触发激光发射。
2) 根据裁判系统设定的规则,限制激光发射频率(每秒钟最快发射 2 次,每连续发射 2 秒后,激光发射停止 1 秒),通过车载裁判系统对激光发射进行控制。
3) 车端裁判系统同时监测激光接收靶的受攻击信号,并将这些数据(包括血量、受击位置等)实时通过uart串口按照指定通信协议发送给算法计算单元。
4. 移动靶子打靶判定
1) 移动靶子裁判系统:监测车辆对动态靶子的射击情况(红蓝双方),并将射击数据传输给裁判端。
2) 移动靶子置于赛场中间,红蓝双方都可以通过激光击打,击中后靶子倒向对方一面,2秒钟后自动抬起。移动靶子最多只能被击中5次,5次之后靶子不再抬起。
3) 参赛队伍只能在己方区域击打移动靶子,在对方区域击打移动靶,裁判系统自动判定为对方击打移动靶子。
5. 信息展示
1) 裁判端:在比赛过程中,将双方的物资抢占情况、射击次数、血量、子弹数量以及动态打靶得分等信息实时整合处理,并发送至大屏幕显示系统,让观众和选手能够清晰、及时地了解比赛进程。
1. 车模涂装要求:
车载靶子模块有明显的灯光效果供机器人自动识别瞄准算法的开发。
设计机器人视觉特征时需遵循以下规范:
不可遮挡靶子模块
不得使用任何手段干扰靶子模块视觉特征的识别
不允许在车模侧面粘贴贴纸:
车模贴纸只允许在车顶或车底粘贴
除组委会提供的专属装甲贴纸,不可在车模的靶子模块或其它外观结构上粘贴形似专属贴纸。
2. 赛场发车、停车流程
赛前准备阶段各参赛队需指定一名参赛队员携带车模入场,由裁判对车模进行检测,并完成赛前准备工作。完成准备工作后,队员携带车模回到比赛准备区。
比赛过程中,参赛队按照裁判员指令依次上场。每场比赛仅允许两支参赛队的各1台车模竞赛,同时只允许双方各三名队员上场。未在5分钟规定时间内到场的参赛队视为弃权。上场后,裁判系统现场随机生成红蓝方对称位置的各4个物资编号后,裁判员发出“比赛准备阶段开始计时”口令后进入比赛2分钟准备阶段。
车模初始是遥控模式,比赛准备阶段计时结束时,裁判员发出“倒计时3、2、1,发车”口令后,裁判通过航模切换到自动驾驶模式从而起动车模。
比赛阶段计时结束时,裁判员发出“比赛结束倒计时3、2、1,比赛结束”口令后,裁判通过航模切换到手动模式从而终止比赛。
3. 赛场虚拟环境设备
赛场内会提前安装用来运行数字环境的计算机平台和用于展示的显示器,用于运行裁判端裁判系统和显示,参赛队需要在赛前准备阶段完成和裁判系统的对接,实现车载裁判系统和裁判端裁判系统的正常通讯。
4. 调试车模要求
各参赛队对车模的编程与调试只能在调试区进行,调试区可提供部分赛段供车模测试。不能在比赛场地进行调试。
参赛队员在比赛准备区,不得上网下载任何资料;比赛期间禁止手机联网车模。每支参赛队仅允3名参赛队员到达比赛场地,其他队员留在准备区。
5. 禁止手动操作车模
比赛阶段(详见3.3.3),参赛选手禁止操作航模遥控以及远程操控车模程序。也不允许人为搬动车模。
6. 比赛结束
单场比赛总限时为5分钟,计时完毕后,将直接终止单场比赛,统计比分。比赛结束后,参赛队员A将车模交回检录区,等待确认比赛积分结果。裁判员和助理裁判员将单场比赛计分统计表交给参赛队确认,参赛队应当场确认签字,如有争议应提请裁判长仲裁。参赛队员签字确认成绩后,可将车模搬回调试区进行维修或修改程序。
本次赛事相关培训资料、规则解读等在渡众机器人智能汽车竞赛专区(https://www.bjdzrobot.com/smartcar.html)、渡众机器人公众号、B站(渡众机器人)QQ群(583838640)持续更新。本赛事最终解释权归组委会所有。
赛事报名、规则补充及后续通知,请关注TsinghuaJoking公众号(卓晴老师)、北京渡众机器人公众号、竞赛QQ群消息等。
联系人:焦阳 15810308767 北京渡众机器人科技有限公司
邮箱:jiaoyang5312@126.com 2. 竞赛请关注如下平台:

