

在GPU上开发大规模并行应用程序时,需要一个调试器,GDB调试器能够处理系统中每个GPU上同时运行的数千个线程。CUDA-GDB提供了无缝的调试体验,可以同时调试应用程序的CPU和GPU部分。
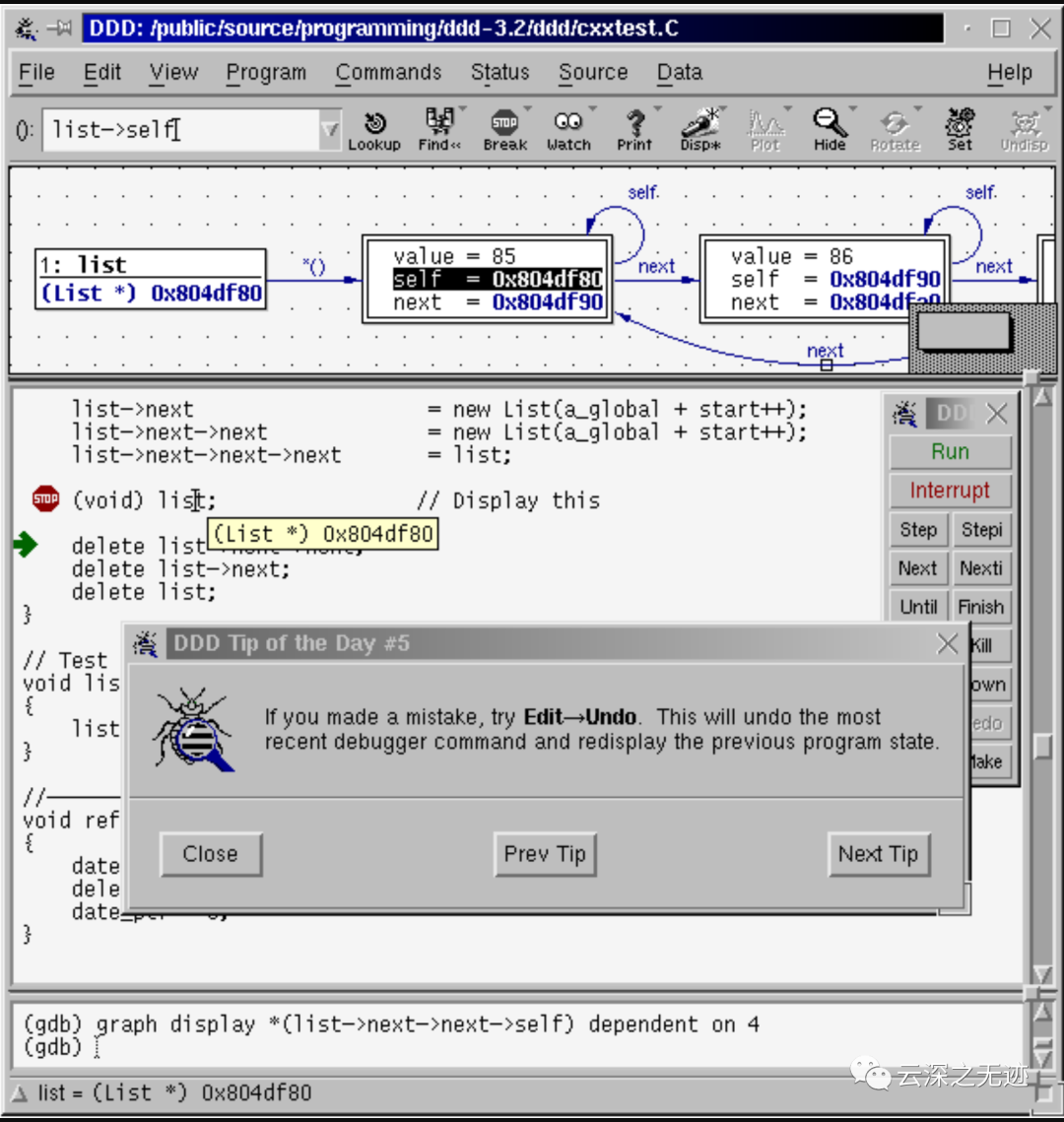
就像GDB一样,CUDA-GDB提供了基于控制台的调试界面,可以从本地系统或具有Telnet或SSH访问权限的任何远程系统的命令行中使用。如果您更喜欢使用GUI前端进行调试,则CUDA-GDB还支持与DDD,EMACS或Nsight Eclipse Edition集成 。
CUDA-GDB是用于调试在Linux和QNX上运行的CUDA应用程序的NVIDIA工具。CUDA-GDB是GNU项目调试器GDB的扩展。该工具为开发人员提供了一种调试实际硬件上运行的CUDA应用程序的机制。这使开发人员可以调试应用程序,而不会出现模拟和仿真环境带来的潜在变化。
CUDA-GDB在Linux上运行,并针对Linux和QNX系统。
CUDA-GDB旨在为使用者提供一个无缝调试环境,该环境允许在同一应用程序中同时调试GPU和CPU代码。正如CUDA C中的编程是C编程的扩展一样,使用CUDA-GDB进行调试是使用GDB进行调试的自然扩展。现有的GDB调试功能固有地用于调试主机代码,并且还提供了其他功能来支持调试CUDA设备代码。
CUDA-GDB支持调试C / C ++和Fortran CUDA应用程序。(Fortran调试支持仅限于64位Linux操作系统)CUDA-GDB可以调试NVCC编译器支持的所有C ++功能。
CUDA-GDB允许用户为单步CUDA应用程序设置断点,还可以检查和修改硬件上运行的任何给定线程的内存和变量。
CUDA-GDB支持调试所有CUDA应用程序,无论它们使用CUDA驱动程序API,CUDA运行时API还是同时使用这两者。
CUDA-GDB支持调试内核,这些内核已针对特定的CUDA体系结构进行了编译,例如 sm_75 要么 sm_80,但还支持调试在运行时编译的内核,称为即时编译或简称JIT编译。
这里插一下什么是QNX的系统
http://www.gnu.org/software/ddd/
http://www.gnu.org/software/emacs/
https://developer.nvidia.com/nsight-eclipse-edition

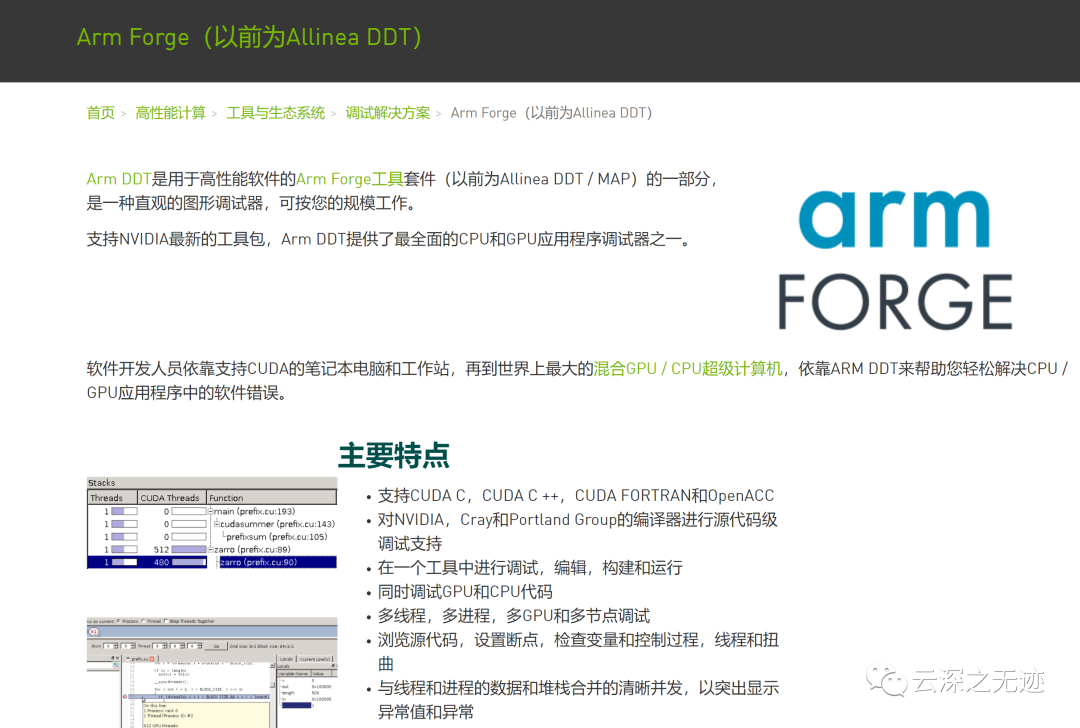
以上这些都是调试器的前端,就是一个好看的壳子。
https://docs.nvidia.com/cuda/cuda-gdb/index.html
以及有使用的文档
https://docs.nvidia.com/cuda/cuda-quick-start-guide/#ubuntu-x86_64https://docs.nvidia.com/cuda/cuda-installation-guide-linux/
我们的Nano是ARM64的Ubuntu的系统

这里先看一下GPU的硬件
https://developer.nvidia.com/zh-cn/cuda-gpus
我们的Nano的算力是这样的
yunswj@yunswj-desktop:~$ uname -m && cat /etc/*releaseaarch64DISTRIB_ID=UbuntuDISTRIB_RELEASE=18.04DISTRIB_CODENAME=bionicDISTRIB_DESCRIPTION="Ubuntu 18.04.5 LTS"# R32 (release), REVISION: 4.4, GCID: 23942405, BOARD: t210ref, EABI: aarch64, DATE: Fri Oct 16 19:44:43 UTC 2020NAME="Ubuntu"VERSION="18.04.5 LTS (Bionic Beaver)"ID=ubuntuID_LIKE=debianPRETTY_NAME="Ubuntu 18.04.5 LTS"VERSION_ID="18.04"HOME_URL="https://www.ubuntu.com/"SUPPORT_URL="https://help.ubuntu.com/"BUG_REPORT_URL="https://bugs.launchpad.net/ubuntu/"PRIVACY_POLICY_URL="https://www.ubuntu.com/legal/terms-and-policies/privacy-policy"VERSION_CODENAME=bionicUBUNTU_CODENAME=bionic




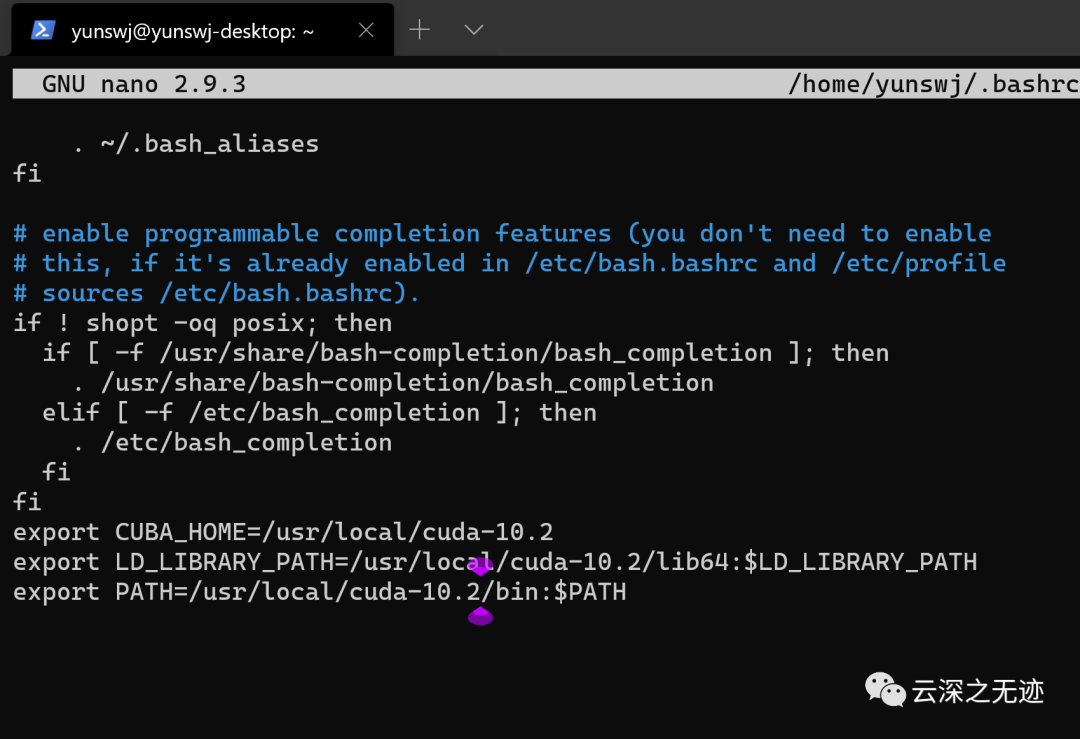
sudo nano ~/.bashrcexport CUBA_HOME=/usr/local/cuda-10.0export LD_LIBRARY_PATH=/usr/local/cuda-10.0/lib64:$LD_LIBRARY_PATHexport PATH=/usr/local/cuda-10.0/bin:$PATH
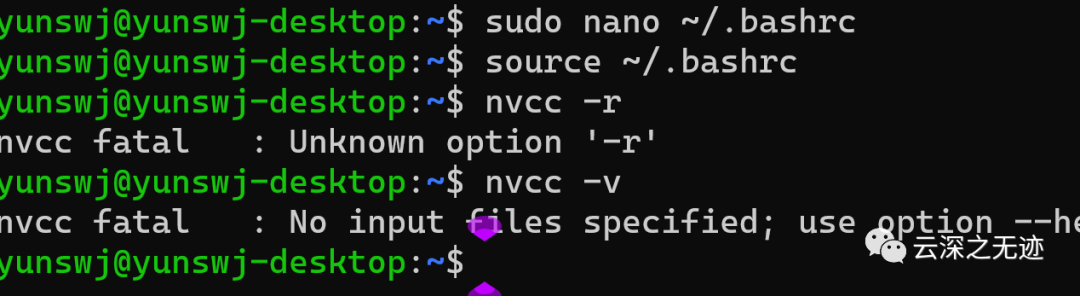
Ctrl+X然后打y
source ~/.bashrcnvcc -vnvcc fatal:No input files specified; use option --help for more information
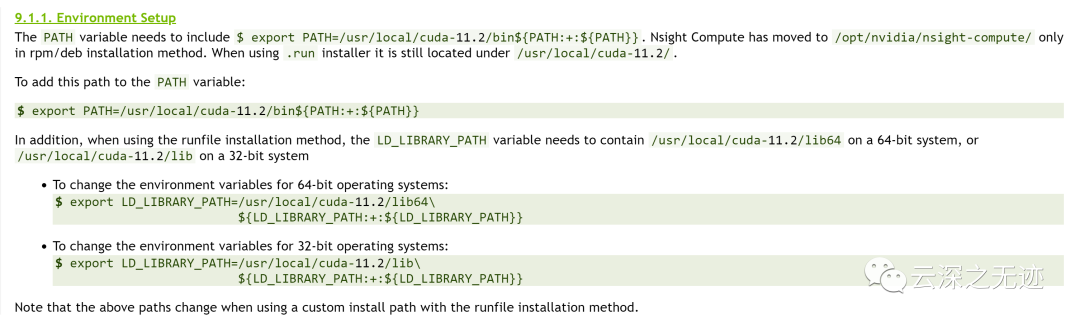
https://docs.nvidia.com/cuda/cuda-installation-guide-linux/在这里是环境变量的设置的文档,目前我的系统里面已经有了,我就不重头安装了

在tmp里面是编译的中间的缓存文件区
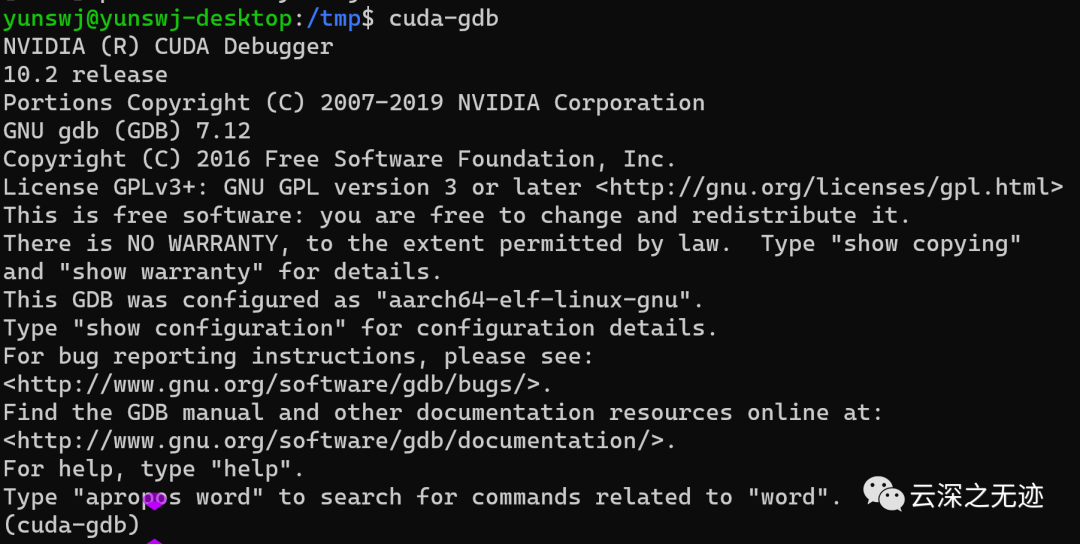
gdb是调试工具

我可以找到它的路径在哪里
https://github.com/inducer/pycuda/releases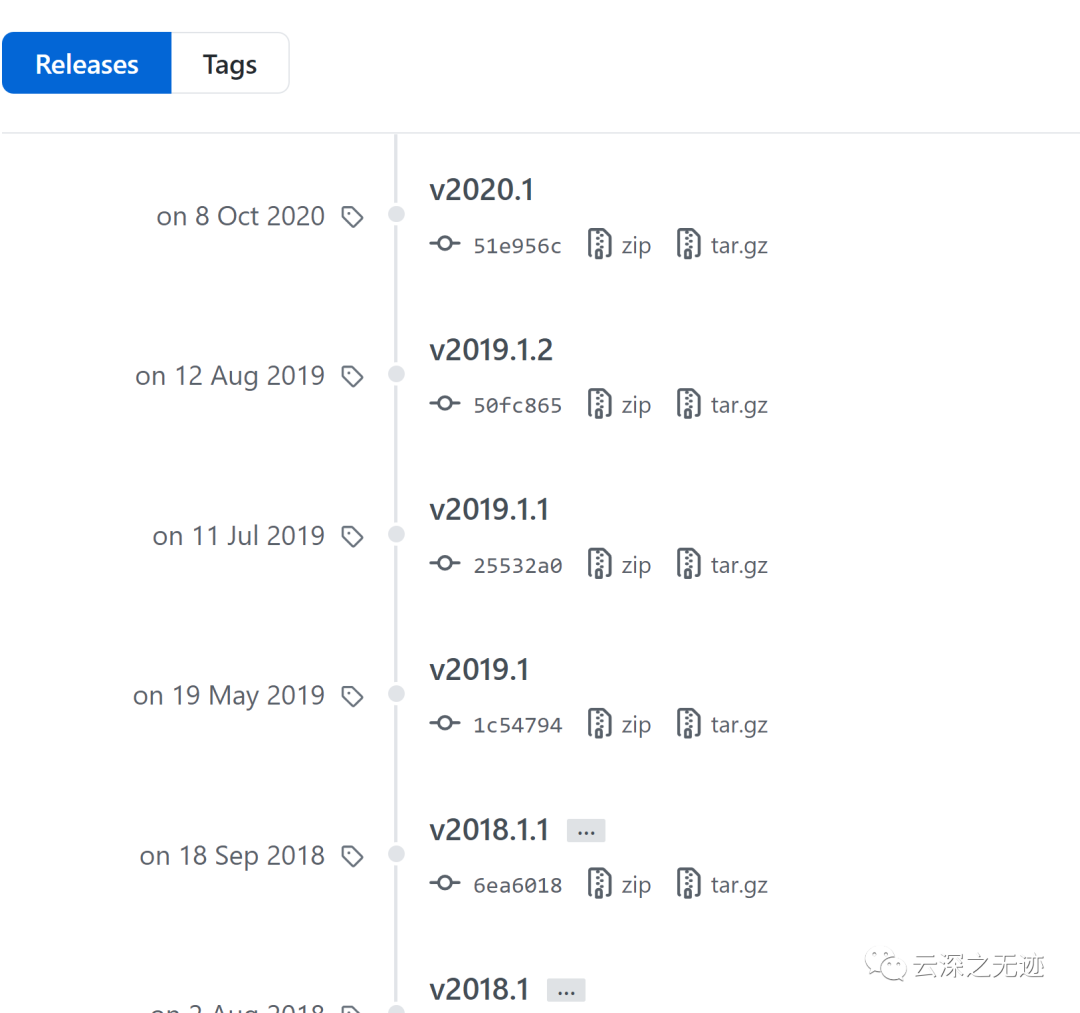
此时我想安装一下cudapy
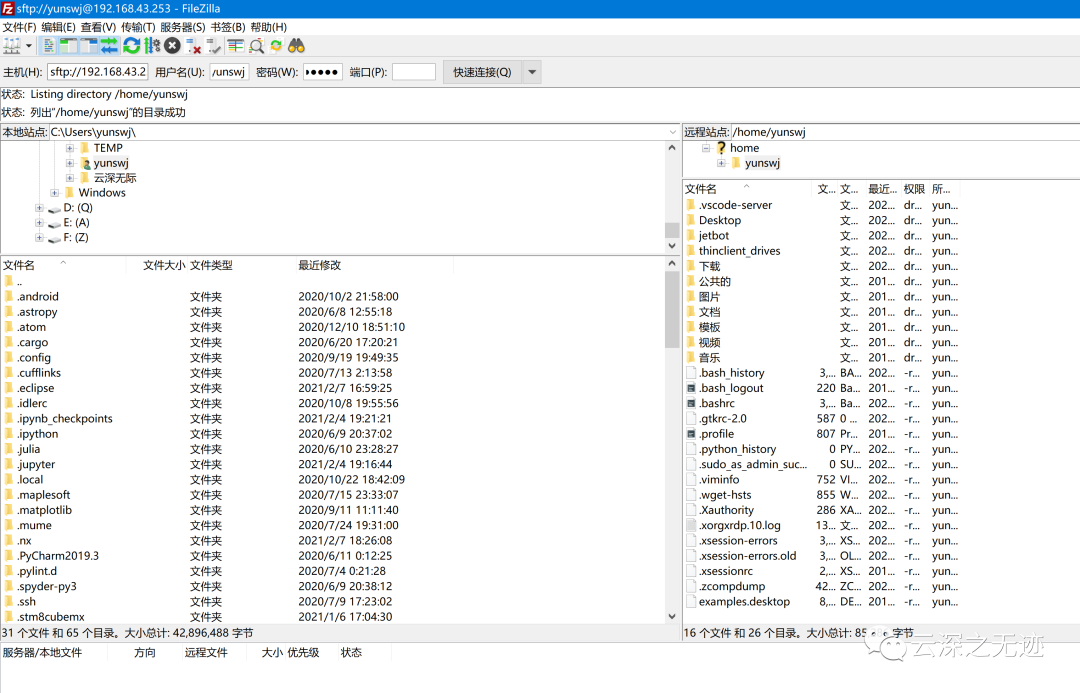
将下载的cudapy文件拉进机器
在这里

验证
解压
tar zxvf pycuda-2019.1.2.tar.gzcd pycuda-2019.1.2/python3 configure.py --cuda-root=/usr/local/cuda-10.2sudo python3 setup.py install
import numpy as npimport pycuda.autoinitimport pycuda.driver as cudafrom pycuda.compiler import SourceModulemod = SourceModule("""#define BLOCK_SIZE 16typedef struct {int width;int height;int stride;int __padding; //为了和64位的elements指针对齐float* elements;} Matrix;// 读取矩阵元素__device__ float GetElement(const Matrix A, int row, int col){return A.elements[row * A.stride + col];}// 赋值矩阵元素__device__ void SetElement(Matrix A, int row, int col, float value){A.elements[row * A.stride + col] = value;}// 获取 16x16 的子矩阵__device__ Matrix GetSubMatrix(Matrix A, int row, int col){Matrix Asub;Asub.width = BLOCK_SIZE;Asub.height = BLOCK_SIZE;Asub.stride = A.stride;Asub.elements = &A.elements[A.stride * BLOCK_SIZE * row + BLOCK_SIZE * col];return Asub;}__global__ void matrix_mul(Matrix *A, Matrix *B, Matrix *C){int blockRow = blockIdx.y;int blockCol = blockIdx.x;int row = threadIdx.y;int col = threadIdx.x;Matrix Csub = GetSubMatrix(*C, blockRow, blockCol);// 每个线程通过累加Cvalue计算Csub的一个值float Cvalue = 0;// 为了计算Csub遍历所有需要的Asub和Bsubfor (int m = 0; m < (A->width / BLOCK_SIZE); ++m){Matrix Asub = GetSubMatrix(*A, blockRow, m);Matrix Bsub = GetSubMatrix(*B, m, blockCol);__shared__ float As[BLOCK_SIZE][BLOCK_SIZE];__shared__ float Bs[BLOCK_SIZE][BLOCK_SIZE];As[row][col] = GetElement(Asub, row, col);Bs[row][col] = GetElement(Bsub, row, col);__syncthreads();for (int e = 0; e < BLOCK_SIZE; ++e)Cvalue += As[row][e] * Bs[e][col];__syncthreads();}SetElement(Csub, row, col, Cvalue);}""")class MatrixStruct(object):def __init__(self, array):self._cptr = Noneself.shape, self.dtype = array.shape, array.dtypeself.width = np.int32(self.shape[1])self.height = np.int32(self.shape[0])self.stride = self.widthself.elements = cuda.to_device(array) # 分配内存并拷贝数组数据至device,返回其地址def send_to_gpu(self):self._cptr = cuda.mem_alloc(self.nbytes()) # 分配一个C结构体所占的内存cuda.memcpy_htod(int(self._cptr), self.width.tobytes()) # 拷贝数据至device,下同cuda.memcpy_htod(int(self._cptr)+4, self.height.tobytes())cuda.memcpy_htod(int(self._cptr)+8, self.stride.tobytes())cuda.memcpy_htod(int(self._cptr)+16, np.intp(int(self.elements)).tobytes())def get_from_gpu(self):return cuda.from_device(self.elements, self.shape, self.dtype) # 从device取回数组数据def nbytes(self):return self.width.nbytes * 4 + np.intp(0).nbytesa = np.random.randn(400,400).astype(np.float32)b = np.random.randn(400,400).astype(np.float32)c = np.zeros_like(a)A = MatrixStruct(a)B = MatrixStruct(b)C = MatrixStruct(c)A.send_to_gpu()B.send_to_gpu()C.send_to_gpu()matrix_mul = mod.get_function("matrix_mul")matrix_mul(A._cptr, B._cptr, C._cptr, block=(16,16,1), grid=(25,25))result = C.get_from_gpu()print(np.dot(a,b))print(result)
最后写一个矩阵程序验证
之后将调试

