欢迎加入专业技术讨论社区:



荐:GSAuto联盟|三电技术专家委员会,初期仅对主机厂、Tirl1等公司新能源汽车三电研发管理制造方面人员、大学及科研机构等新能源汽车三电研究人员,现已招募2000+人,主要分布在50+主机厂、50+Tire1、大学、科研机构等三电研发管理岗位人员。有意愿分享的个人或者企业请联系小编微信(GSAuto0001)或者邮箱(gearshare@163.com)。
今日推荐
↓↓↓



在2024年春晚中,宇树科技(Unitree Robotics)的人形机器人登台表演,展示了中国在智能机器人领域的技术实力。以下从技术角度分析其可能涉及的核心技术和创新点。
宇树人形机器人通过UnifoLM大模型驱动,支持复杂动作(如后空翻、舞蹈)和自主学习(如G1的算法升级后实现精准射门)。这表明,AI技术正从虚拟走向实体,年轻人需关注跨学科融合,如机械工程、AI算法、材料科学的结合,未来职业方向可向“具身智能”等高增长领域倾斜。
 核心产品矩阵:
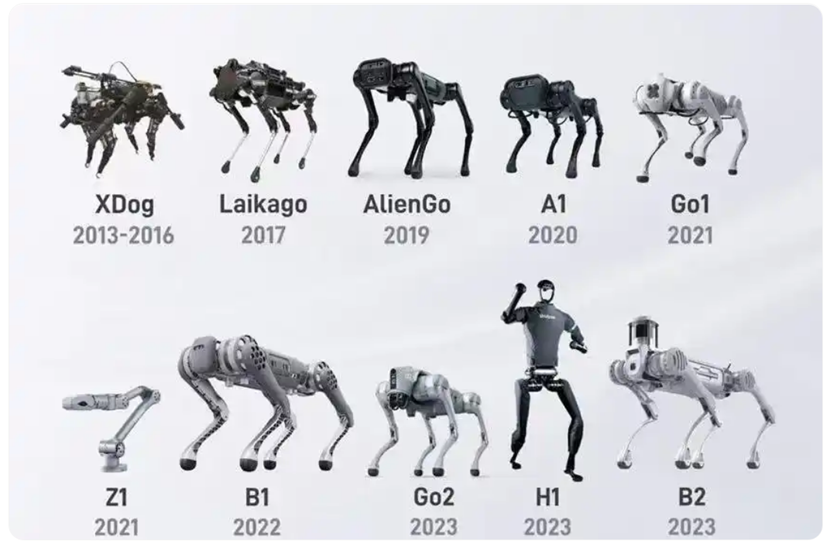
核心产品矩阵:宇树的产品演进遵循“四足→人形→开源生态”的阶梯式路径:
四足机器人(2017-2023):以Go1消费级机器狗打开民用市场,B系列工业机器人切入救援、巡检场景,累计销量超万台;
人形机器人(2023-2025):H1聚焦工业搬运,G1瞄准企业级服务,通过模块化设计实现快速场景适配;
生态构建(2024至今):开源强化学习代码库与数据集,降低行业准入门槛,形成技术-市场双轮驱动。

1. 核心硬件技术
高扭矩无刷电机
四足机器人需要快速响应和精准控制,宇树机器人可能采用高功率密度的无刷电机(如Unitree Go2的M107电机),搭配谐波减速器,实现高效能量转换和动态平衡。
轻量化结构设计
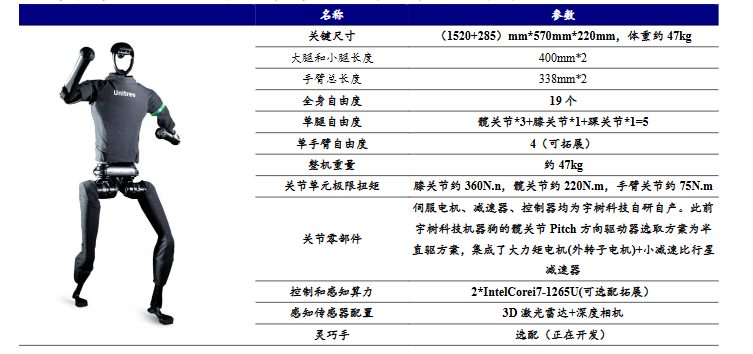
为适应舞台快速运动,机身采用碳纤维、航空铝等轻质材料,结合仿生关节设计(如12-16自由度),在保证强度的同时降低自重,提升运动灵活性。
多传感器融合
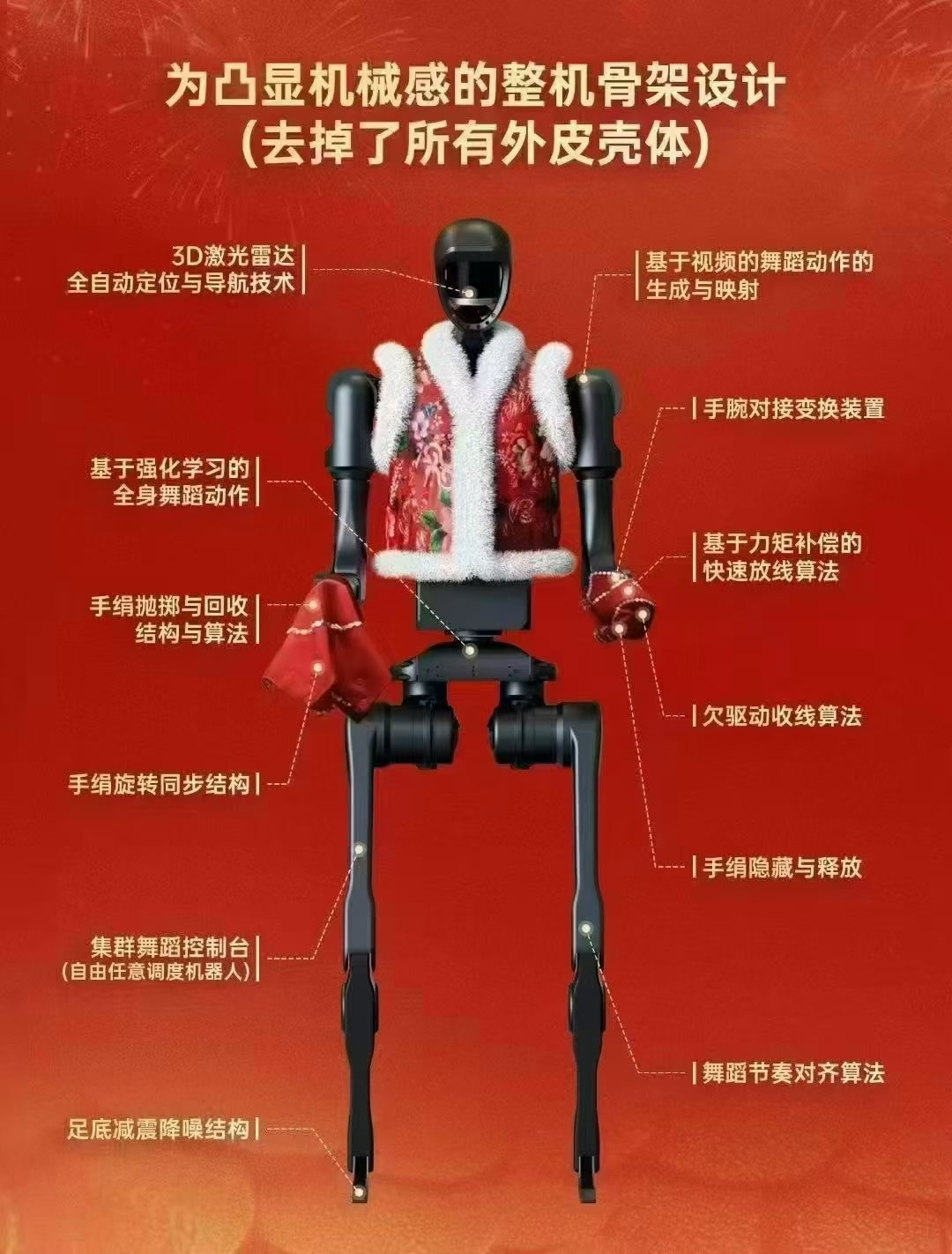
配备深度摄像头(如Intel RealSense)、激光雷达、IMU(惯性测量单元)及力矩传感器,实现环境感知、自平衡和地形适应,确保在复杂舞台灯光下的稳定运行。
2. 运动控制算法
模型预测控制(MPC)
通过实时预测机器人动力学状态,调整步态和足端轨迹,实现动态平衡。例如,在春晚表演中,机器人可能需应对舞台升降、灯光干扰等突发情况。
强化学习(RL)优化步态
结合仿真训练和真实环境迁移学习,优化步态参数(如步幅、频率),适应不同舞台表面(如光滑地板、斜坡),甚至完成跳跃、翻滚等高难度动作。
多机协同控制
多台机器人需通过中央控制系统(如ROS 2)实现毫秒级同步,可能采用无线通信(Wi-Fi 6/5G)结合时间戳同步技术,确保群体动作一致性。
3. 舞台表演的定制化技术
动态路径规划
在人员密集的舞台上,机器人需实时避障(如演员、道具),可能采用改进的A*算法或RRT*(快速探索随机树)进行局部路径重规划。
声光交互系统
为配合节目效果,机器人可能集成麦克风阵列和LED灯光模组,通过语音识别(如Keyword Spotting)或预设指令触发舞蹈动作,增强观赏性。
抗干扰设计
舞台电磁环境复杂,机器人需具备电磁屏蔽、冗余通信(如双频段切换)和故障自检功能,防止因信号干扰导致失控。
4. 与行业竞品的对比优势
成本控制:
宇树机器人(如Unitree B2)售价约2万美元,仅为波士顿动力Spot的1/5,通过供应链本土化和模块化设计降低硬件成本。
运动性能:
Unitree H1等新型号最高奔跑速度可达5m/s,超越Spot的1.6m/s,且支持3D跳跃(垂直跳高达1.2米),更适合舞台表演的视觉冲击需求。
开发友好性:
提供开放的SDK和ROS接口,允许第三方定制动作库(如春晚舞蹈编程),缩短开发周期。
5. 技术挑战与未来展望
实时性要求:
直播场景下需确保零延迟响应,未来可能引入边缘计算(如机器人端部署NPU)提升本地决策速度。
能源管理:
高动态动作加剧能耗,需优化电源管理算法(如动态电压调节)并探索高密度电池(如固态电池)的应用。
应用场景拓展:
春晚验证了娱乐场景的可行性,未来或向安防巡检、灾难救援等领域延伸,需加强多模态感知(如热成像、气体检测)能力。
总结
宇树机器人在春晚的表现体现了中国在人形机器人运动控制、群体协同和场景适应上的技术突破。其核心在于硬件-算法-场景的深度整合,未来通过AI与具身智能的进一步结合,有望在更多领域实现商业化落地。

宇树科技供应链
核心部件供应商
中大力德:提供RV减速器、谐波减速器、驱动器、伺服电机等关键零部件,应用于宇树机器狗关节模组,已实现批量供货;
全志科技:供应智能终端应用处理器芯片,支持四足机器狗智能化升级;
江苏雷利:提供动力传输系统和行星执行器,技术覆盖家电、医疗、机器人等领域;
长盛轴承:供应滑动轴承和丝杆产品,合作研发应用于机器狗关节部位;
速腾聚创:32线激光雷达用于机器人环境感知系统;
奥比中光:提供视觉相机,增强机器人视觉交互能力。
材料与关键结构件供应商
金发科技:提供改性塑料和高分子材料,参与宇树机器人材料研发;
曼恩斯特(蓝方技术):合作开发灵巧手、关节等核心结构件;
贝斯特(宇华精机):研发人形机器人用行星滚柱丝杠,提升运动精度;
金力永磁:供应永磁材料及执行器零部件,支持人形机器人关节设计。
战略合作与参股企业
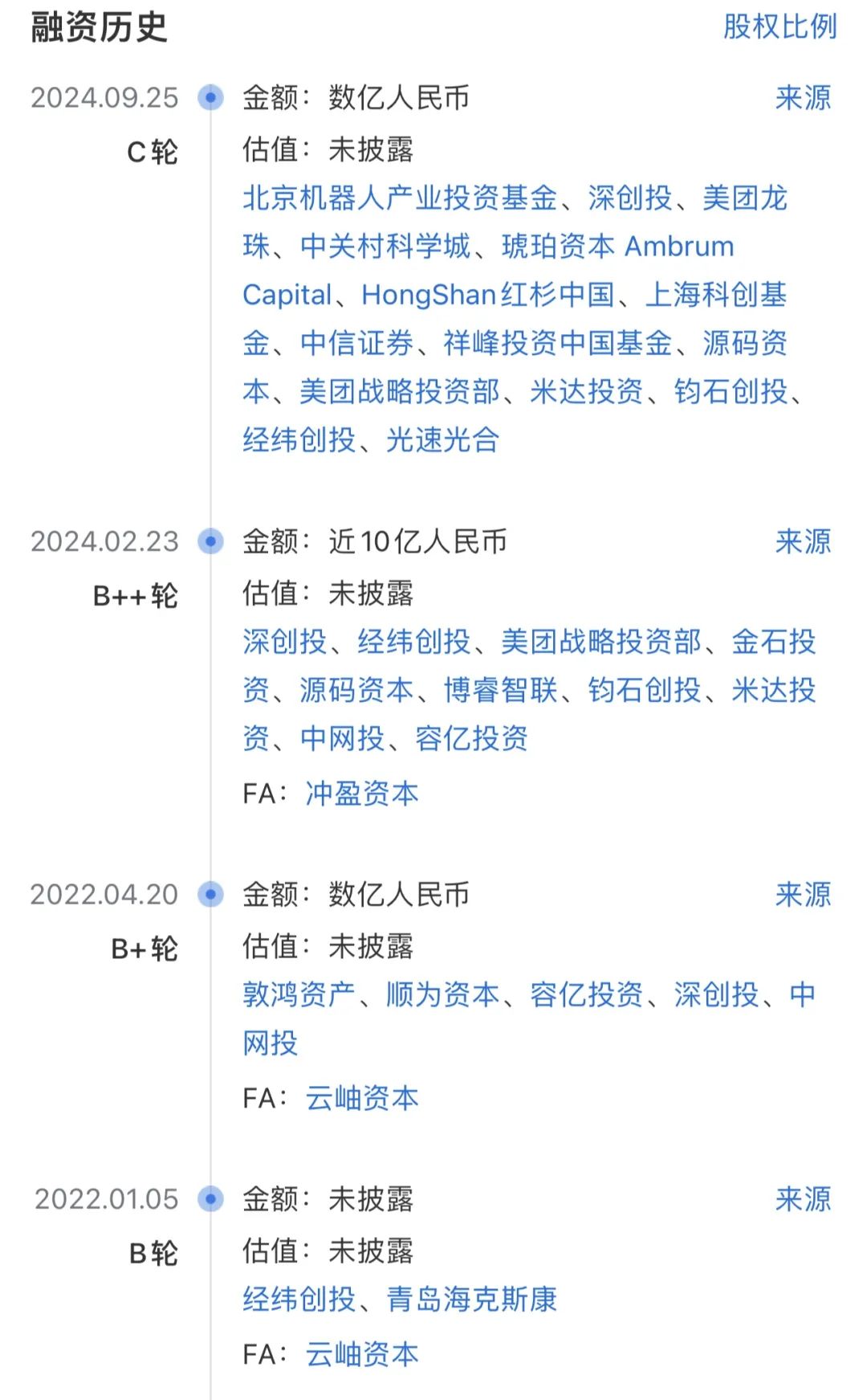
卧龙电驱:通过股权投资间接持股宇树科技,提供电机技术支持;
中科创达:通过安创科技参股,推动AI算法与机器人硬件集成;
盛通股份:合作开发四足机器人教育应用场景。
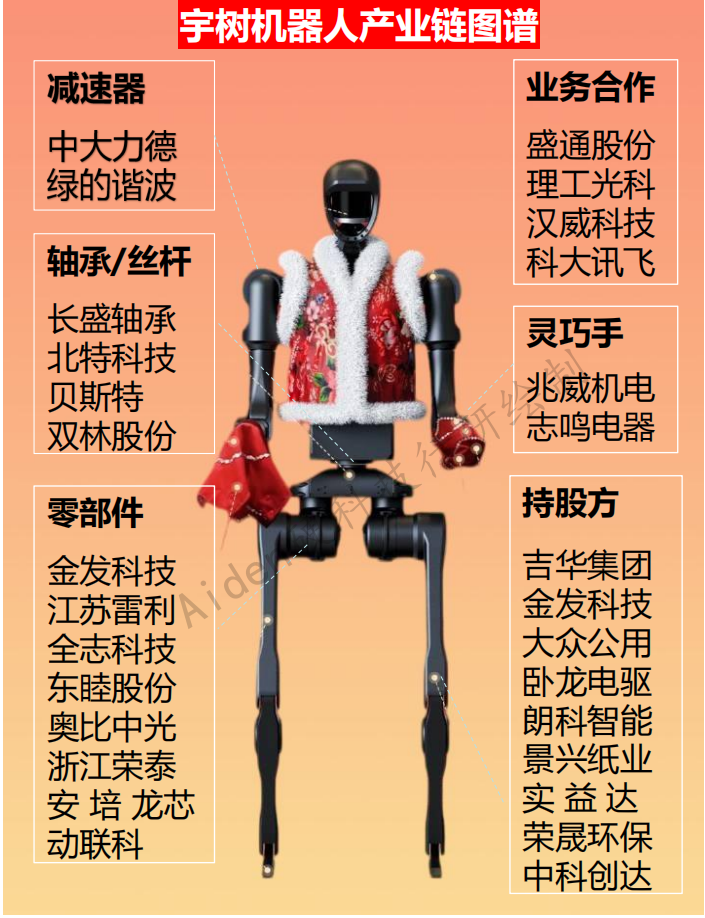
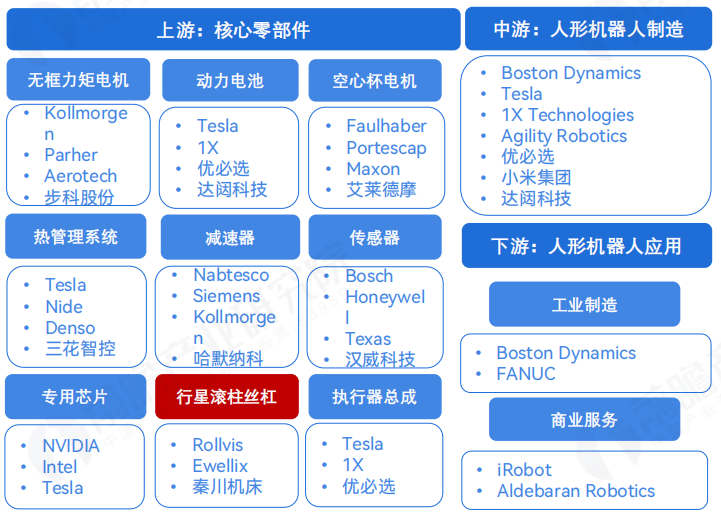
人形机器人产业链图谱
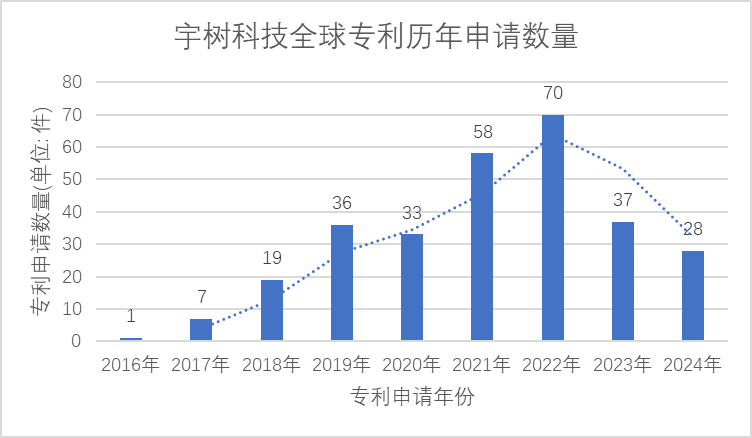
全球市场规模
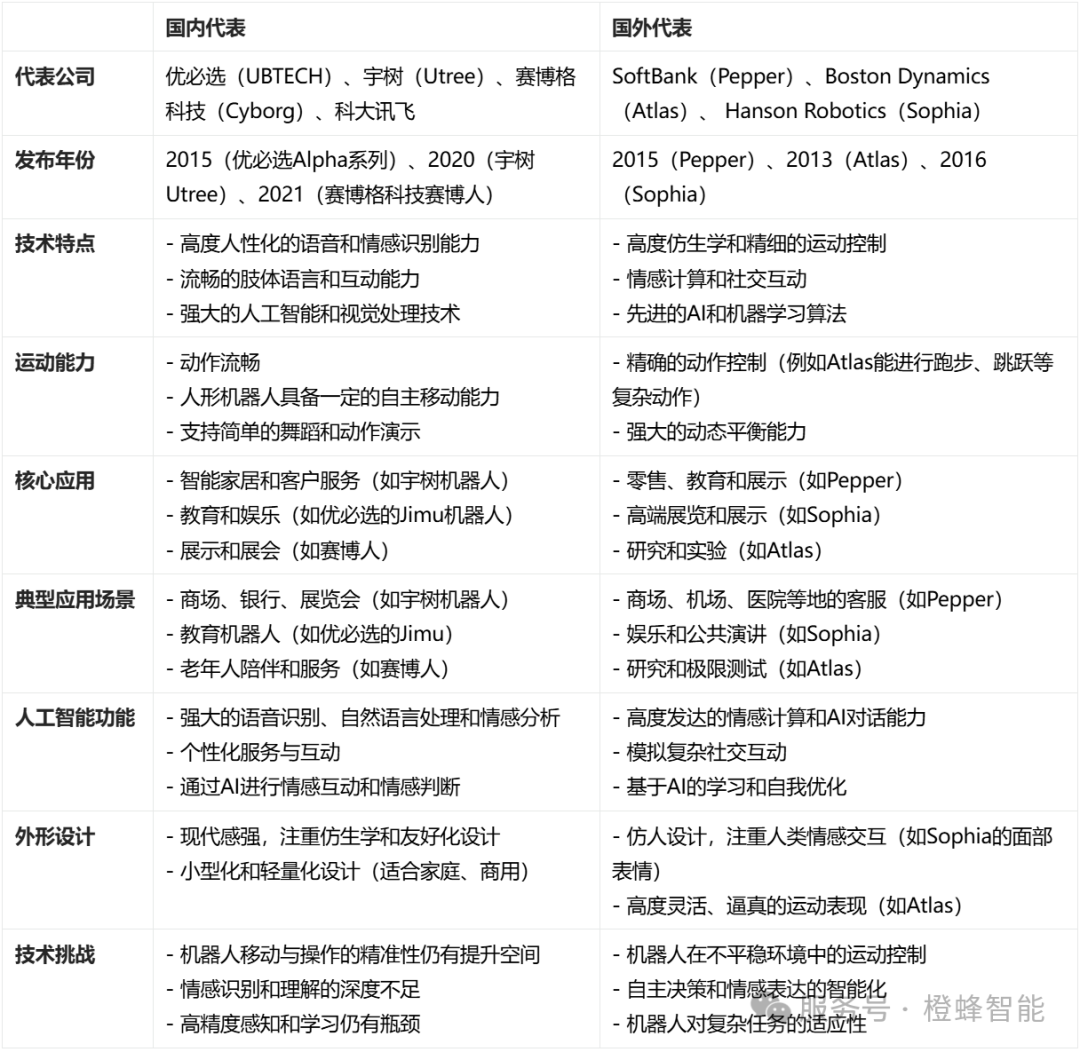
国内和国外人形机器人的代表性发展情况、技术特点和应用场景:
2023年全球人形机器人市场规模约21.6亿美元。随着技术的进步和C端商业化应用,到2029年,全球人形机器人产业规模预期达324亿美元。
全球四足机器人市场处于快速增长阶段,2023年市场规模约15亿美元,预计到2028年将突破50亿美元(CAGR 25%+)。驱动因素包括工业自动化需求、危险环境替代人工、消费级市场渗透率提升。
全球四足机器人市场前三的企业分别是宇树科技、波士顿动力和云深处科技。2023 年其营收占比分别是 40.65%、12.67%和 11.11%。宇树科技以较大领先优势位居规模份额第一。
如需加入中国具身智能微信社群请添加管理员微信GSAuto0001,发送名片后邀请入群,备注人形机器人。
-end-
▼点击阅读原文加入三电专家委员会知识星球
