

随着自动驾驶技术的发展,高速NOA、城市NOA作为智驾系统中的一项重要技术,其设计初衷是利用高精度地图、传感器融合、深度学习算法及实时环境感知等多重技术实现辅助驾驶,防止驾驶员因长时间驾车出现疲劳驾驶。智驾系统也可以在短时间内检测到交通环境的变化,并发出风险提示,其在数据处理与环境感知方面相较于人类驾驶员也具备一定优势,若正确使用智驾系统,无疑会有效改善交通环境,避免事故的发生。
技术落地到现实,其实会出现很多意想不到的问题,现如今的智驾系统,并不能完全处理各种交通路况,尤其是现阶段智驾系统和人类驾驶员的驾驶权责判定相对混淆。有时遇到突发状况,智驾系统无法处理,便需要人类驾驶员立即介入,人不是机器,需要思考和反应的时间,在提示需要介入时,总会存在一定的时间间隙,若驾驶员来不及反应,反而更容易发生事故。

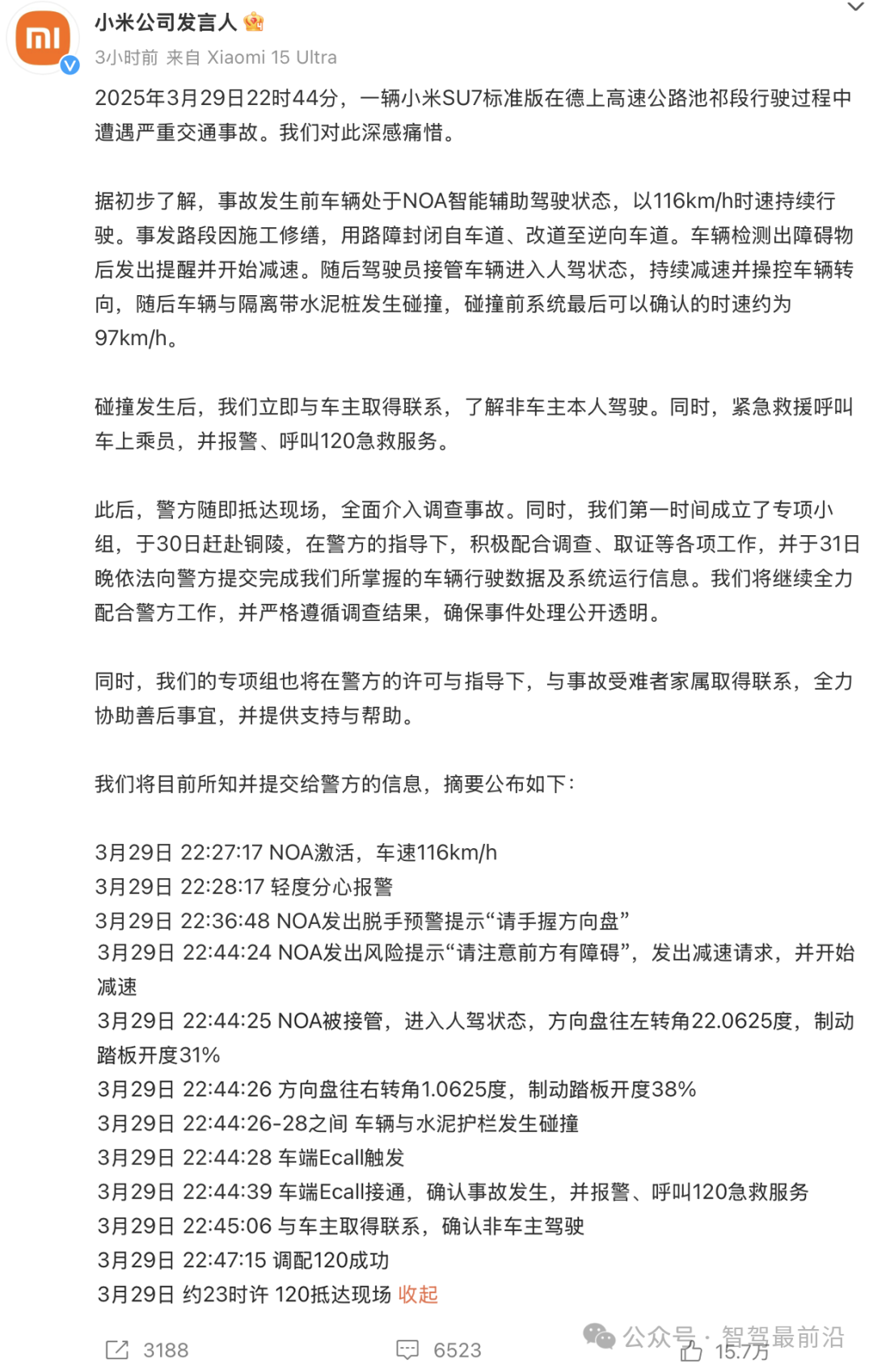
从小米的说明中也可以看到,从系统发出障碍检测提示到驾驶员实际接管操作再到撞上水泥护栏,仅仅经历了短短的几秒钟时间,这对驾驶员的反应速度和操作准确性提出了极高要求。超高的车速、复杂的交通路况和突如其来的接管提示,或给驾驶员带来较大的心理压力,导致操作上出现犹豫或错误,致使事故的发生。智驾最前沿以为,自动驾驶技术的发展方向不仅在于提升系统自身的感知与决策能力,也在于如何更好地协调系统与驾驶员之间的信息传递和操作衔接,使得驾驶员在接管时能够迅速、准确地判断并作出应对措施。
事故发生在施工路段,其实也反映出当前高精度地图和实时数据融合技术在动态路况下的局限性。施工区域及临时封闭的道路环境并非日常常态,地图数据更新速度和系统对临时障碍物的判断能力都存在一定不足,在边缘场景下,自动驾驶系统的环境识别能力可能受到影响,导致在关键时刻无法及时作出最佳反应。
驾驶员在接管后的操作轨迹显示出其在紧急情况下试图同时进行方向调整与减速,但在高速行驶中操作的惯性与车辆物理特性使得控制效果受到限制。在自动驾驶加速落地阶段,这类的接管需求只会越来越多,如何确保车辆被接管后操作的稳定性也是汽车行业需要研究的一个课题,正如前文所说,突如其来的接管无疑会让人类驾驶员来不及反应,若在高速行驶的情况下瞬间将车辆的所有控制权都交由驾驶员,这无疑增加了事故发生的概率。
这起事故,也说明现阶段大家对自动驾驶的认知度依然不足。我们在刷短视频时,经常会看到宣传脱手车辆自动驾驶的内容,这无疑是在混淆大家对于自动驾驶系统的认知。我们一定要清晰认识到,现在的自动驾驶只是处于L2级别,在这一阶段,驾驶员仍旧需要对车辆的操作负主要责任。作为企业,在宣传智驾系统时,一定不能过度宣传,更要加强智驾系统使用的相关教育,确保驾驶员对自动驾驶系统的功能和局限有足够清醒地认识,避免因过分依赖系统而忽视对道路环境的实时关注。
这一事故或也说明现阶段自动驾驶行业的系统测试与验证机制存在漏洞。当前许多自动驾驶系统在正式商用前,只是在标准路况下进行大量测试,但对于施工区域、临时封闭等非标准路况的测试较少。随着自动驾驶技术的逐步普及,相关测试标准和验证流程亟待进一步完善,确保系统在各种复杂场景下都能保持稳定安全运行。监管部门和行业组织应当联合建立事故数据库,通过对事故案例的深入分析,总结出共性问题,从而推动技术改进和标准制定,使整个行业能够在事故中不断汲取经验,提升整体安全性。
自动驾驶技术的发展不仅是一项科技进步,更是一场驾驶文化和交通管理模式的变革。驾驶员在享受智能化辅助驾驶带来的便捷时,必须时刻保持对道路情况的关注和对系统局限性的警惕。我们必须明确意识到,现阶段自动驾驶系统并不能全权替代人类驾驶,而是处于一种人机协同的驾驶模式。在这种模式下,驾驶员既要信任技术带来的便利,也不能放松对车辆状态的主动监控。只有当技术、管理和驾驶文化三者实现良性互动,自动驾驶技术才能真正成为提高交通安全和出行效率的重要工具。最后,智驾最前沿还是要强调:现在的自动驾驶并不是无人驾驶,切莫过度相信系统能力,智驾是尝鲜的,生命是自己的!
-- END --

