在黑夜暴雨中的驾驶舱内,后视镜上密布的雨珠模糊了后方潜在的危险——这是传统汽车后视镜在极端天气下的典型困境。然而,在不久的未来,驾驶员只需切换至电子后视镜模式,后方的车流、车道便会瞬间清晰可见,仿佛暴雨被“计算”成了透明。这种突破物理极限的视觉革命,正是得益于香港中文大学(深圳)孙启霖教授团队攻坚的“端到端计算摄像”技术。
孙启霖教授长期深耕于端到端计算摄像相机设计、计算光学等领域。他凭借卓越的技术创新,荣获2022年度深圳市人工智能奖和春申金字塔杰出人才称号。作为一位兼具学术深度与产业敏锐度的科学家,他积极探索产学研双轨实践,创立了点昀技术(Point Spread Technology),致力于打造人与机器、环境之间的感知交互入口,将前沿技术转化为实际应用,让科技真正普惠生活。
汽车工业革新:
将电子后视镜延时缩短10倍
传统后视镜在雨雾天气、复杂光线或强光炫目的环境下往往失灵,给行车安全带来巨大隐患。电子后视镜的出现为这一问题提供了理想的解决方案。与传统后视镜相比,电子后视镜具有风阻小、盲区小、雨雾天气清晰度高等优势。然而,另一个技术难题随之而来——摄像延时问题。
孙启霖教授在阿卜杜拉国王科技大学读博期间所创立的点昀技术攻克了超低延时的无内存ISP架构,在国标要求200毫秒、市面主流产品延时35-60毫秒的大环境下,点昀技术实现了20毫秒的超低延时电子后视镜技术,做到了业界最短的端到端延时。以120km/h高速行驶的车辆为例,点昀技术的超低延时后视镜能够将延时的距离差由超过3.33米缩小到0.66米以内,大大提升驾驶员对后方环境的实时判断能力。
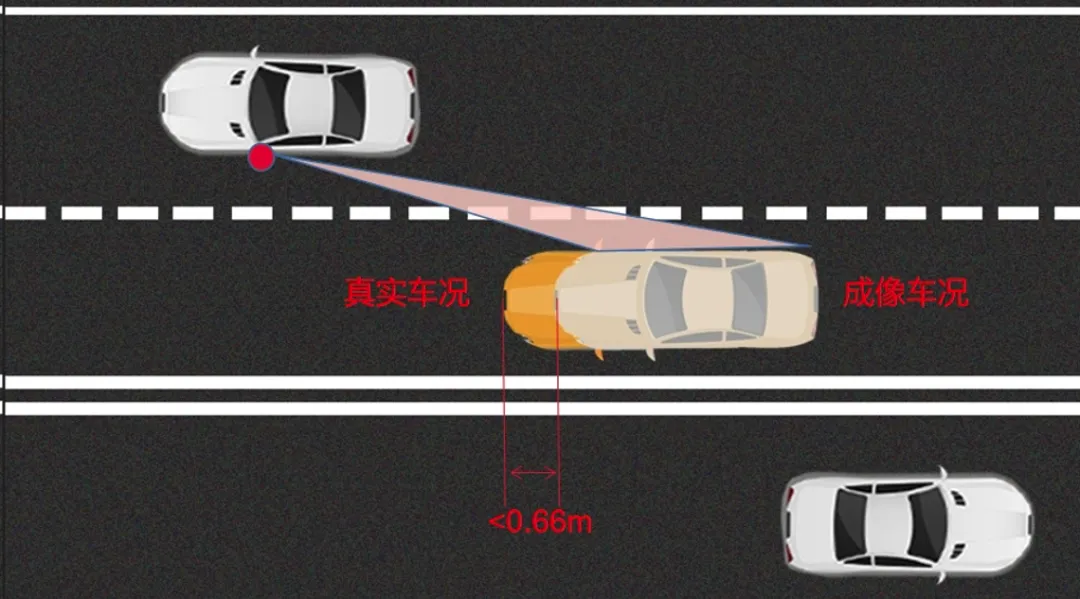
延时距离差示意图
该技术通过无缓存流式处理架构、自研ISP架构等核心技术,突破传统架构需缓存导致的延时瓶颈,实现从传感器曝光到屏幕显示的“零延迟”。在关键器件的生产上,点昀技术已经能够实现全国产化,以保障供应链稳定,摆脱国际环境带来的卡脖子限制,给汽车装上看得更清、反应更快、判断更准的“中国智造超级眼睛”。同时,其自研的ISP架构具有低功耗、支持高级去噪和局部色调映射等特点,不仅可赋能电子后视镜产品,对国产手机、车载SoC芯片提供了新的ISP的IP选择。
随着2023年7月1日电子后视镜新国标的正式实施,允许仅配备电子后视镜的汽车合法上路行驶,电子后视镜市场呈现明显的上升趋势。目前孙启霖教授团队技术已获得多家车企定点合作,据他预测,未来两年半至三年内将在全国市场达到百万级年销量,拥有广阔的市场前景。
最年轻的AI黑马:
构建人本位的万物交互生态
由孙启霖教授领航的点昀技术是国际领先的端到端智能视觉系统方案商,专注于打造端到端感知与交互新入口,致力于推动下一代计算摄像革命。在2022年第二届“深圳人工智能奖”的评选中,孙启霖教授团队研发的“端到端可微计算光学平台”获得“深圳人工智能行业应用奖”,成为了入选的14项成果中最年轻的初创企业。
荣获2022年度深圳市人工智能奖
孙启霖教授表示,所有技术都是服务于人,人是一切的核心。他希望能够构建人与环境、机器与环境之间的信息桥梁,通过通用感知与交互技术,让机器更懂人类世界,真正做到科技普惠每个人的生活。
重新定义计算摄像:
打破硬件与算法的传统壁垒
如果将手机摄影的发展进程比作一场“光学革命”,过去十年的技术跃迁早已颠覆了人们的认知——从10万像素的模糊画面,到如今动辄亿万级像素的清晰度,动态镜头、长焦画面的捕捉游刃有余,手机镜头似乎已经无所不能。但孙启霖教授指出,这场“革命”仍存在一个隐形天花板:传统计算摄影多基于经验驱动,其硬件和算法始终各自为政,光学系统与后处理算法无法做到联合优化,难以达到最佳效果。
孙启霖教授团队创新性地引入可微分光线追踪技术,从应用需求出发,将硬件、软件、算法以及配套部件融合为一个完整的系统,最终呈现给终端用户。“我们打破了传统光学硬件与算法之间的壁垒,通过构建可微分的系统,实现硬件参数与后续算法参数的联合优化。”孙教授表示,这种方法不仅提升了系统效率,还能在功耗、算法复杂度和成本之间找到最佳平衡点。
从手机拍照到低延时车载图像处理,从三维摄像到智能B柱的应用,从工业自动化到自动驾驶——端到端计算摄像正在重塑计算摄像的定义和范式。它的应用之广泛,与每个人的日常生活息息相关。孙教授团队引领的这一技术创新未来将有望在多个领域克服传统技术的不足,突破成本、功耗和性能的隐形天花板,带来质的飞跃。
布局未来:
架起机器与世界的感知桥梁
研究者与创业者的双重身份赋予了孙启霖教授更广阔的视野——既要知道现在能做什么,也要预见未来。在未来10-15年内,机器人产业将迎来大规模爆发,孙教授早已瞄准机器人产业,积极布局,专注于高精度环境感知系统的研发。他指出,汽车与机器人的架构会逐渐趋同,两者均由一个核心的决策控制器配合终端的感知来实现具体的功能。因此,汽车的部件与机器人的部件有望可以通用,通过复用汽车产业的规模化硬件生态,机器人核心部件成本有望断崖式下降,这将间接地推动机器人产业的降本与扩张。
而在另一片战略高地,孙教授正突破水下光学极限,通过解决水下浑浊环境中的高远距离信息摄像问题,为海洋资源勘探构筑“深蓝之眼”,有望应用在海洋探测、潜艇监测、港口监测、渔业监测等众多水下应用场景,为国家战略资源的开发与监测提供支持。
面对当下人工智能领域“短平快”的创新竞逐,孙启霖教授却更像一名深海勘探者——他笃信长周期、大资源投入的价值,专注于具有长远价值的研究与应用,他相信只有扎实的基础与持续的努力,并组织一帮天才做好一件事才能在时代浪潮中脱颖而出。这种长期主义也投射到他对人才培养的理念中:“竞争力来自系统级能力,我希望学生能够避免‘短平快’的刷论文心态,每个人能够沉下心来在读书期间从软件、硬件到算法搭建一个完整系统,成为能够独当一面的架构者和领导者。”
CUHK-Shenzhen
青年教授简介

孙启霖
香港中文大学(深圳)助理教授
孙启霖,香港中文大学(深圳)助理教授,点昀技术创始人。获得2022年度深圳市人工智能奖、春申金字塔杰出人才。研究领域集中于端到端计算摄像相机设计、计算摄像、光学、SPAD阵列摄像、水下摄像与散射介质激光雷达,博士期间发表多篇一作ACM TOG、SIGGRAPH、Siggraph Aisa、CVPR(oral)等并长期担任审稿人。担任CAAI青工委委员、3DV专委、智能无人系统建模与仿真专委、GAMES执行委员、FOE青年编委等。所创办的点昀技术致力于打造端到端计算光学平台,提供摄像一体化解决方案。主持量产了面向实时三维重建的高速、高精度车规、工业级RGBD相机(100FPS软时钟多机对齐),实现了小面积低功耗全并行异构4KRAW域BM3D视频与超低延时ISP。