


《APM32芯得》系列内容为用户使用APM32系列产品的经验总结,均转载自21ic论坛极海半导体专区,全文未作任何修改,未经原文作者授权禁止转载。
最近我开始学习 uC/OS-III 实时操作系统,并着手将其移植到APM32F407 开发板上。在这个过程中,我遇到了许多有趣的挑战和发现,也感受到了操作系统带来的强大功能和灵活性。
在这篇帖子中,我打算分享我的学习经验和移植过程,包括如何开始学习uC/OS-III、配置步骤、移植过程中遇到的问题以及解决方法。我希望通过这篇帖子,能够帮助那些和我一样对操作系统感兴趣的朋友们,一起探索如何在APM32F407 上应用 uC/OS-III。
1. uC/OS-III简介:
uC/OS-III,又称微型C语言编写的操作系统第3版,是一个基于优先级的实时内核,可升级和固化。它无限制地支持任务个数,并且作为第三代内核,拥有现代实时内核所需的基本功能,例如资源管理、同步和任务间通信。值得注意的是,uC/OS-III具有独特的功能,如完整的运行时性能测量、直接向任务发送信号或消息,以及任务可以同时等待多个内核对象。
简单来说,uC/OS-III是一个可扩展和稳固的实时内核,可以管理无限数量的任务。它满足现代实时内核的期望,提供资源管理、同步和任务间通信等功能。它的独特之处在于能够在运行时测量性能、直接向任务发送信号或消息,以及任务可以同时等待多个信号或消息队列。
下面是一个列出了uC/OS-III的功能的简单表格:
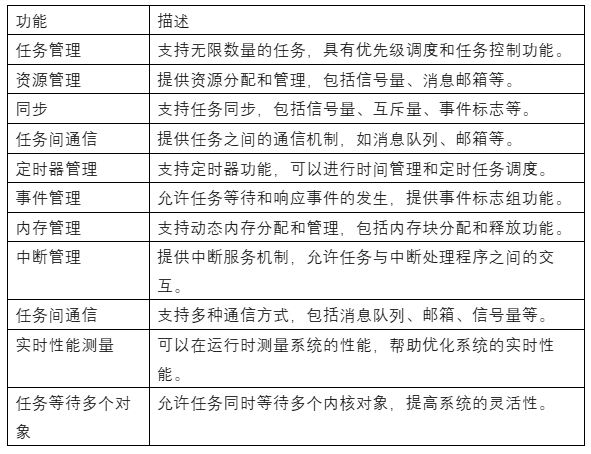
这些功能使得uC/OS-III成为一个强大、灵活且功能丰富的实时操作系统,适用于各种嵌入式系统和实时应用场景。
2.移植流程
一、uCOS-III系统文件获取
我这里提供了两种下载方式,如下。
1.网盘链接下载:https://pan.baidu.com/s/1nHZjj2A40qW_jbbODOXfOw?pwd=762k
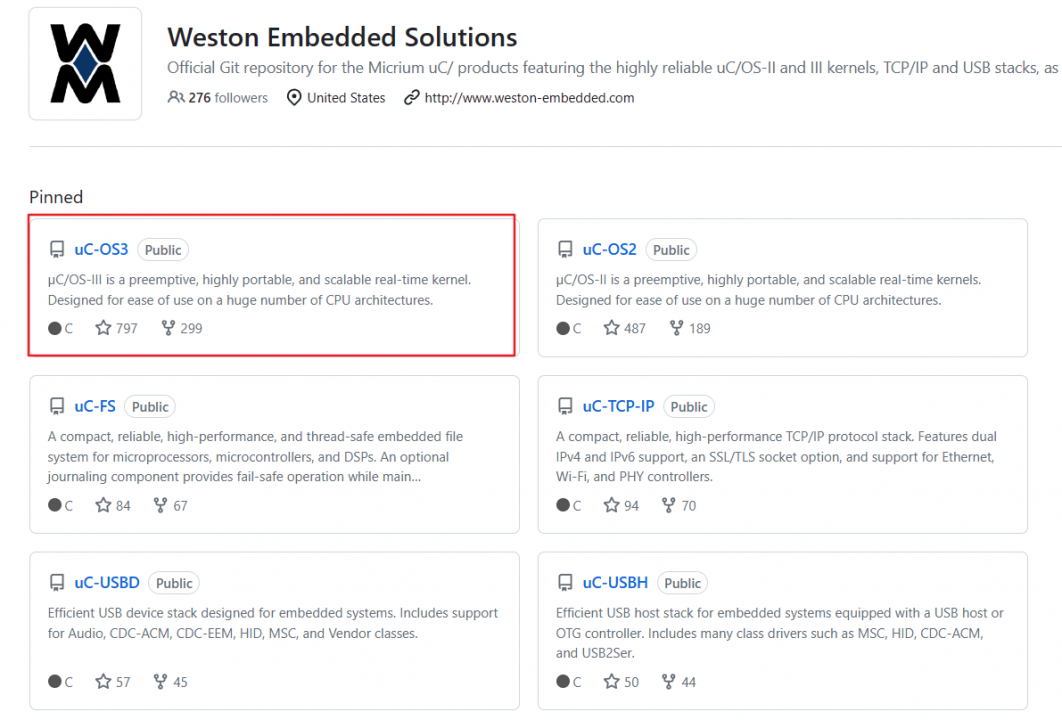
2.官方下载:https://github.com/weston-embedded
以下是点击官方下载的链接后,需要下载的源文件。
① uc-os3源码下载
二、添加ucos-III系统文件
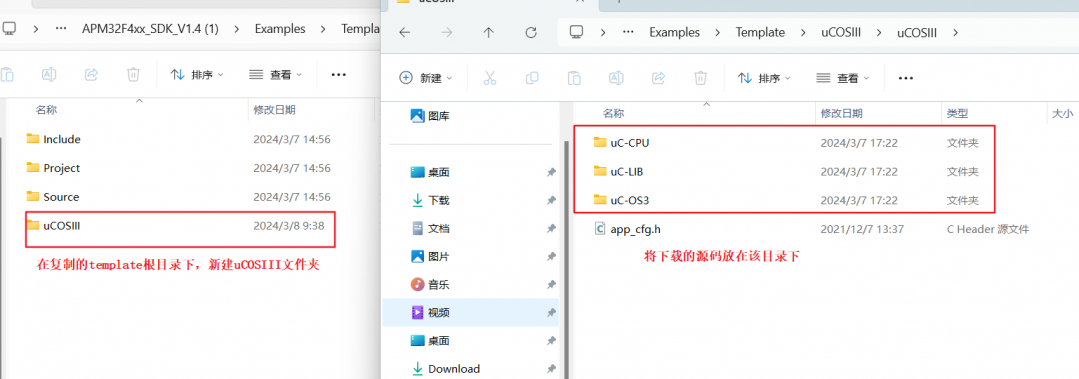
1、去极海官网(https://geehy.com/apm32?id=47)下载APM32F407SDK,打开Examples文件夹,复制一份Template模板,新建ucos-III文件夹,把下载的源码文件全部都复制进去。
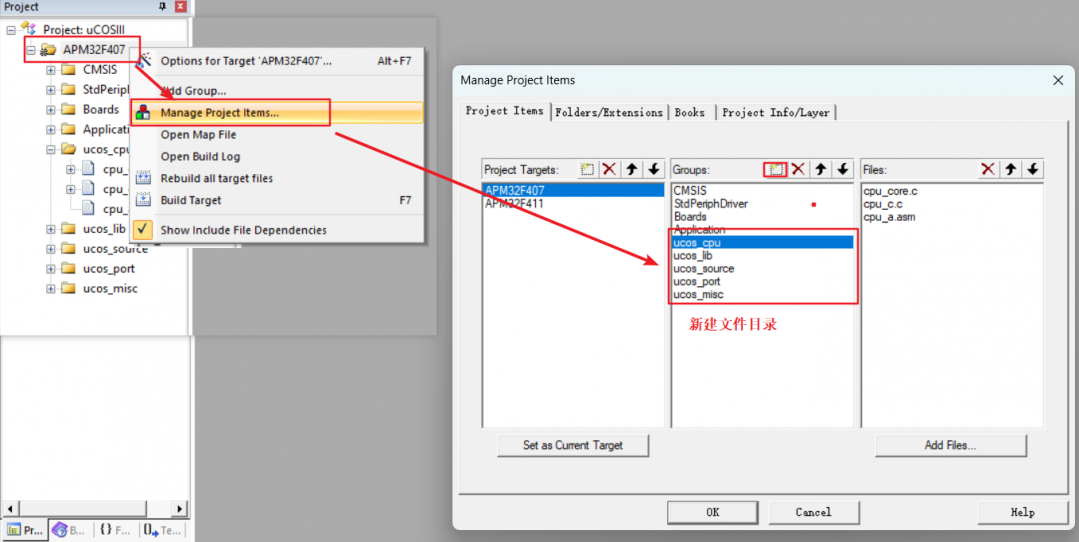
2、打开mdk工程,新建一些文件目录。
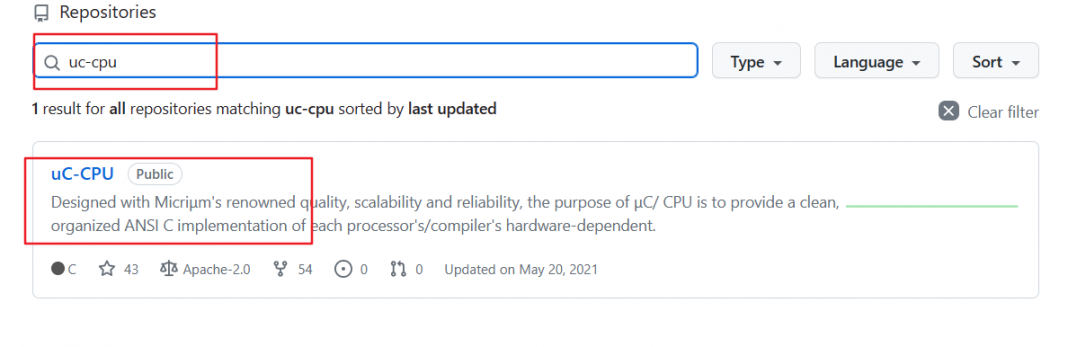
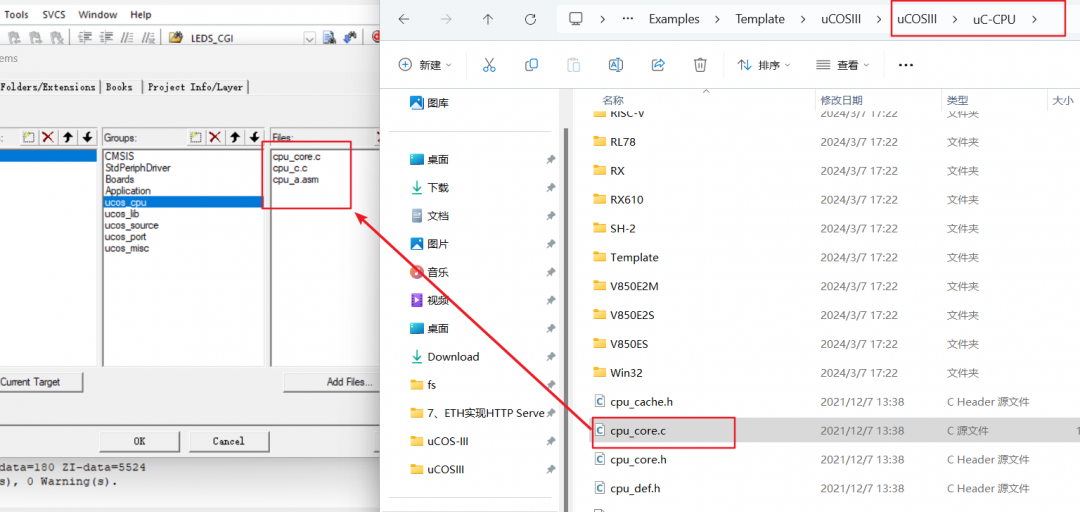
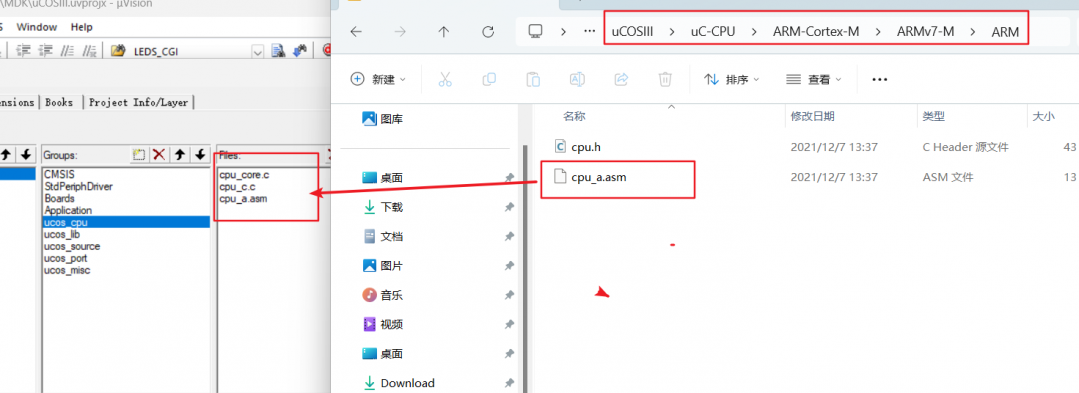
3、向ucos_cpu中添加文件
打开uCOSIII\uC-CPU文件目录,添加cpu_core.c文件。
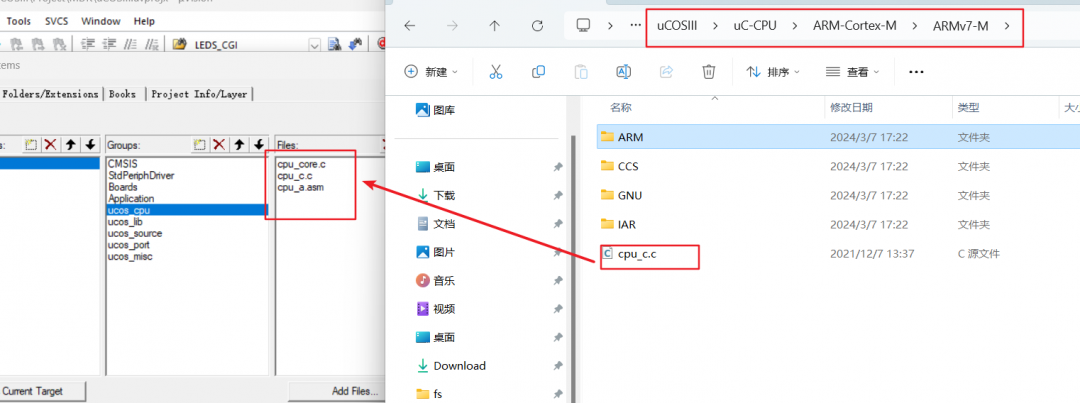
打开uCOSIII\uC-CPU\ARM-Cortex-M\ARMv7-M文件目录,添加cpu_c.c。
打开uCOSIII\uC-CPU\ARM-Cortex-M\ARMv7-M\ARM文件目录,添加cpu_a.asm。
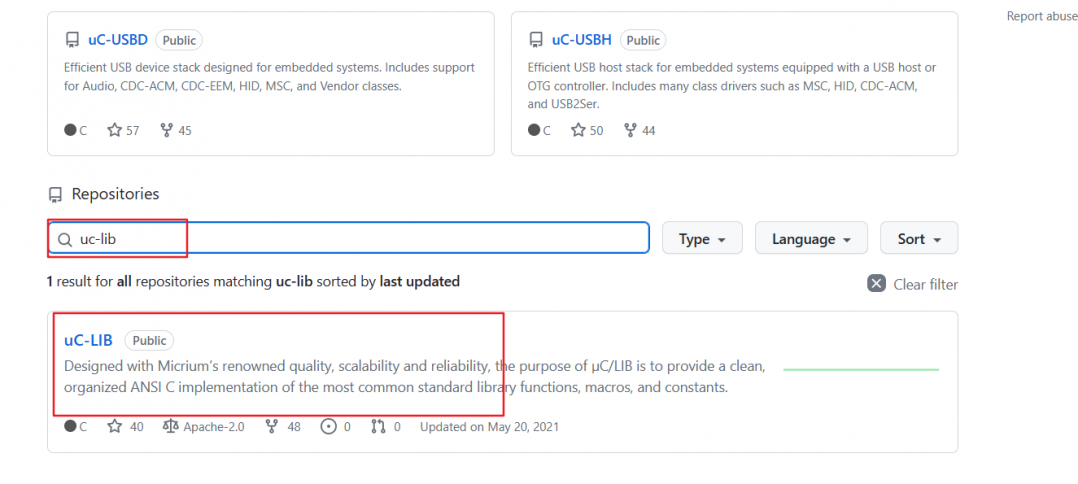
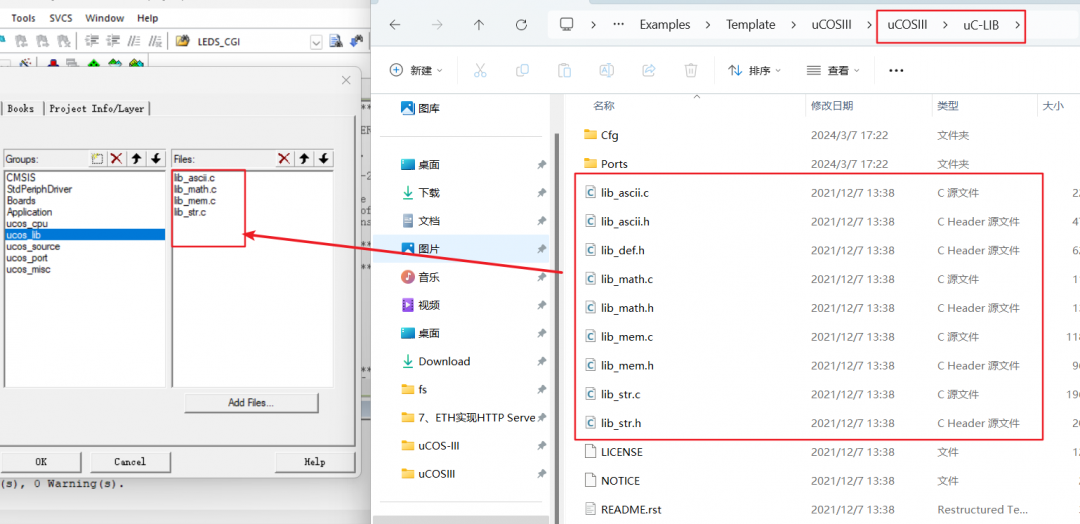
4、向ucos_lib中添加文件。
打开uCOSIII\uC-LIB文件目录,添加该文件目录下的所有.c文件。
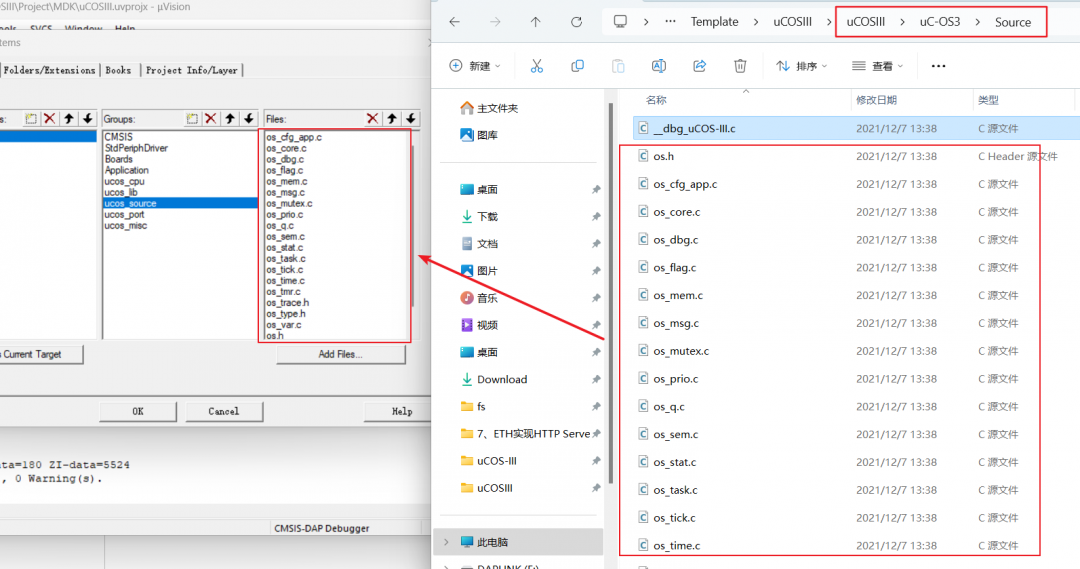
5、向ucos_source中添加文件。
打开uCOSIII\uC-OS3\Source文件目录,添加除了__dbg_uCOS-III.c文件的其余所有文件。
6、向ucos_port中添加文件。
打开uCOSIII\uC-OS3\Ports\ARM-Cortex-M\ARMv7-M\ARM文件目录,添加该目录下所有文件。
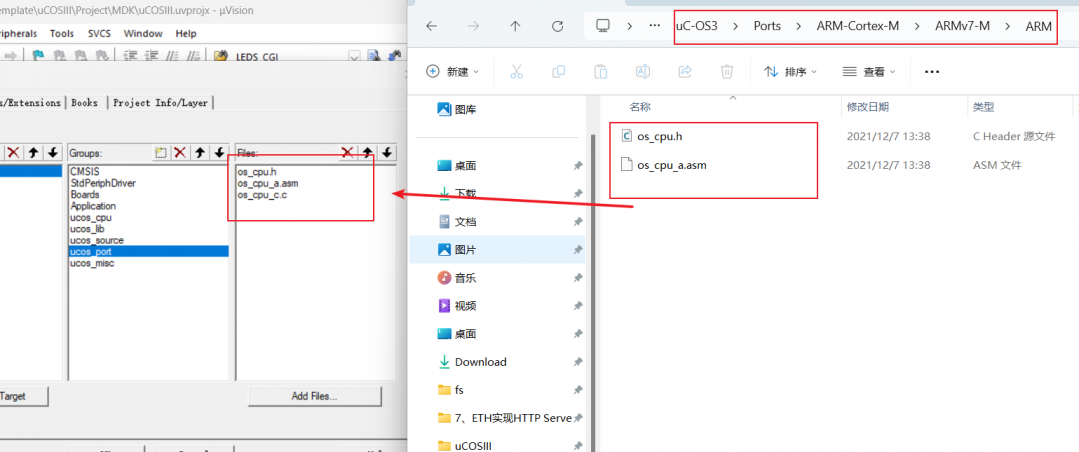
打开uCOSIII\uC-OS3\Ports\ARM-Cortex-M\ARMv7-M文件目录,添加os_cpu_c.c。
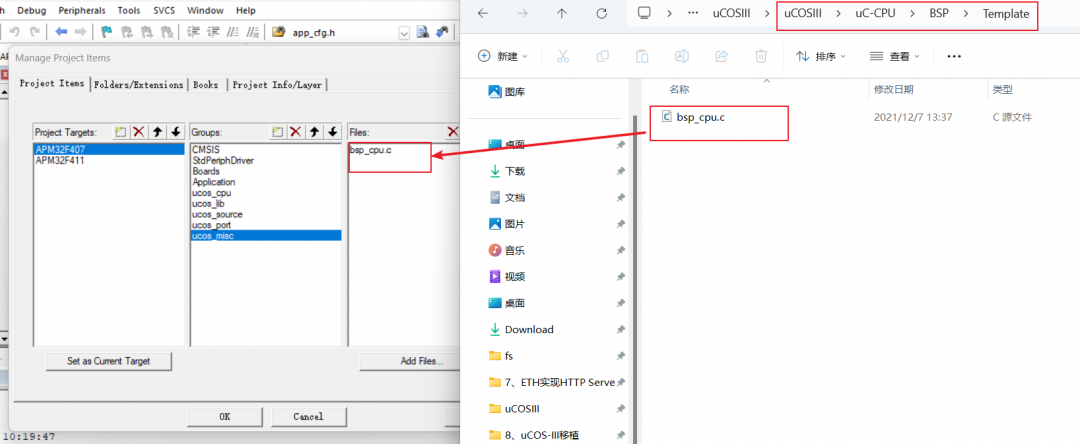
7、向ucos_misc中添加文件。
打开uCOSIII\uC-CPU\BSP\Template文件目录,添加bsp_cpu.c。
三、编写代码
1、编写app_cfg.h文件。
ucos-III是没有提供app_cfg.h这个文件的,我们需要手动编写。在uCOSIII下新建app_cfg.h,添加如下代码。

这段代码是uC/OS-III示例程序的配置文件,定义了一些任务优先级、任务堆栈大小以及跟踪/调试配置相关的宏。以下是每个定义的宏的作用:
1. 任务优先级(`APP_CFG_TASK_START_PRIO`, `APP_CFG_TASK_1_PRIO`, `APP_CFG_TASK_2_PRIO`):
- 定义了不同任务的优先级,用于确定任务在多任务系统中的执行顺序。数字越小,优先级越高。
2. 任务堆栈大小(`APP_CFG_TASK_START_STK_SIZE`, `APP_CFG_TASK_BLINKY_STK_SIZE`,`APP_CFG_TASK_1_STK_SIZE`, `APP_CFG_TASK_2_STK_SIZE`):
- 定义了不同任务所使用的堆栈大小。堆栈大小越大,任务能够使用的局部变量和函数调用深度就越大。
3. 跟踪/调试配置:
- `TRACE_LEVEL_OFF`、`TRACE_LEVEL_INFO` 和`TRACE_LEVEL_DBG` 定义了跟踪信息的级别。在这里,`TRACE_LEVEL_OFF` 表示关闭跟踪,`TRACE_LEVEL_INFO` 表示仅输出信息级别的跟踪,`TRACE_LEVEL_DBG`表示输出调试级别的跟踪。
-`APP_CFG_TRACE_LEVEL` 和 `BSP_CFG_TRACE_LEVEL` 分别定义了应用程序和 BSP (Board Support Package) 的跟踪级别。
- `APP_CFG_TRACE` 和 `BSP_CFG_TRACE` 是跟踪输出函数的宏定义。在这里,它们被定义为`printf`,表示将跟踪信息输出到标准输出设备(通常是串口)。
4. 跟踪输出宏 (`APP_TRACE_INFO`,`APP_TRACE_DBG`, `BSP_TRACE_INFO`, `BSP_TRACE_DBG`):
- 这些宏用于根据跟踪级别输出相应级别的跟踪信息。当跟踪级别高于宏定义的级别时,才会输出相应级别的跟踪信息,否则会被忽略。
2、编写main函数。
我已经编写了一个使用ucos-iii的简单的示例代码,代码如下。
/*!
我们可以简单分析一下这段代码,这段代码实现了两个任务:LED任务 (`ledTask`) 和串行打印任务(`serialPrintTask`)。以下是代码的主要功能和实现细节:
1. 任务优先级和堆栈大小定义:
- 定义了LED任务和串行打印任务的优先级 (`LED_TASK_PRIO` 和`SERIAL_TASK_PRIO`),以及任务堆栈大小 (`STACK_SIZE`)。
- 定义了LED任务和串行打印任务的任务控制块 (TCB) 和堆栈数组。
2. uC/OS-III初始化:
- 使用`OSInit()` 函数初始化uC/OS-III。
3. 串口和LED初始化:
- 配置了USART1作为调试串口,并初始化LED2和LED3。
4. 任务创建:
- 使用`OSTaskCreate()` 函数创建LED任务和串行打印任务。
- `ledTask` 函数用于定期切换LED状态,并通过设置事件标志组通知串行打印任务。
- `serialPrintTask`函数等待事件标志组的设置,然后通过串口打印消息。
5. 事件标志组创建:
- 使用`OSFlagCreate()` 函数创建了一个名为 "LED Flags" 的事件标志组 (`ledFlagGrp`)。
6. 多任务启动:
- 使用`OSStart()` 函数启动uC/OS-III多任务调度。
7. 主循环:
- 在`main` 函数的无限循环中,没有具体的操作,只是用来保持程序运行。
8. LED控制和定时延迟:
- `ledTask` 定期切换LED2和LED3的状态,然后通过设置事件标志组通知串行打印任务。
- `serialPrintTask`等待事件标志组的设置,并在收到通知后通过USART串口打印消息。
9. 系统时钟设置:
- 使用`SysTick_Config()` 函数配置系统时钟,用于提供定时功能。
总体来说,这份代码展示了如何使用uC/OS-III创建并管理多个任务,通过事件标志组实现任务之间的同步,以及使用USART进行串行通信。
四、编译与下载

初次编译时会报错,原因是ucos-iii系统文件中已经实现了这两个中断服务函数。
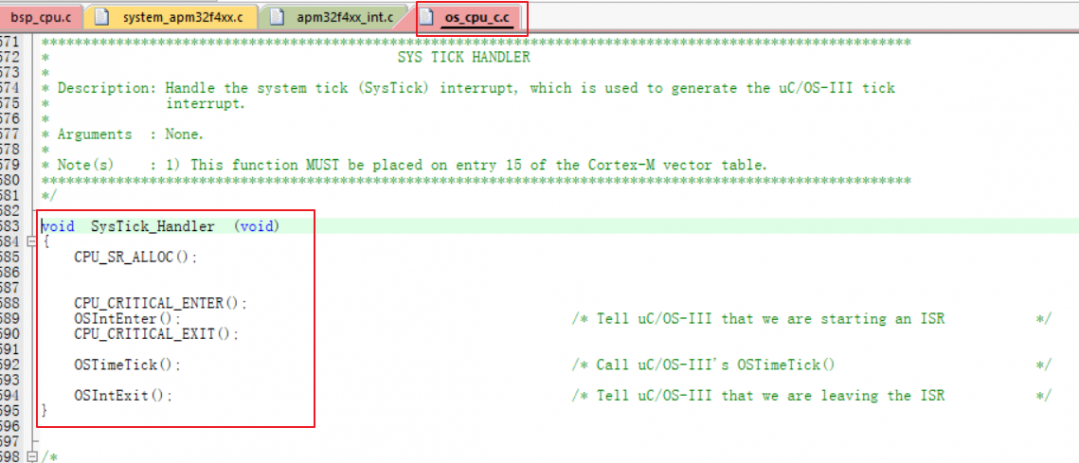
注释apm32f4xx_int.c中这两个中断服务函数的实现,再次编译。
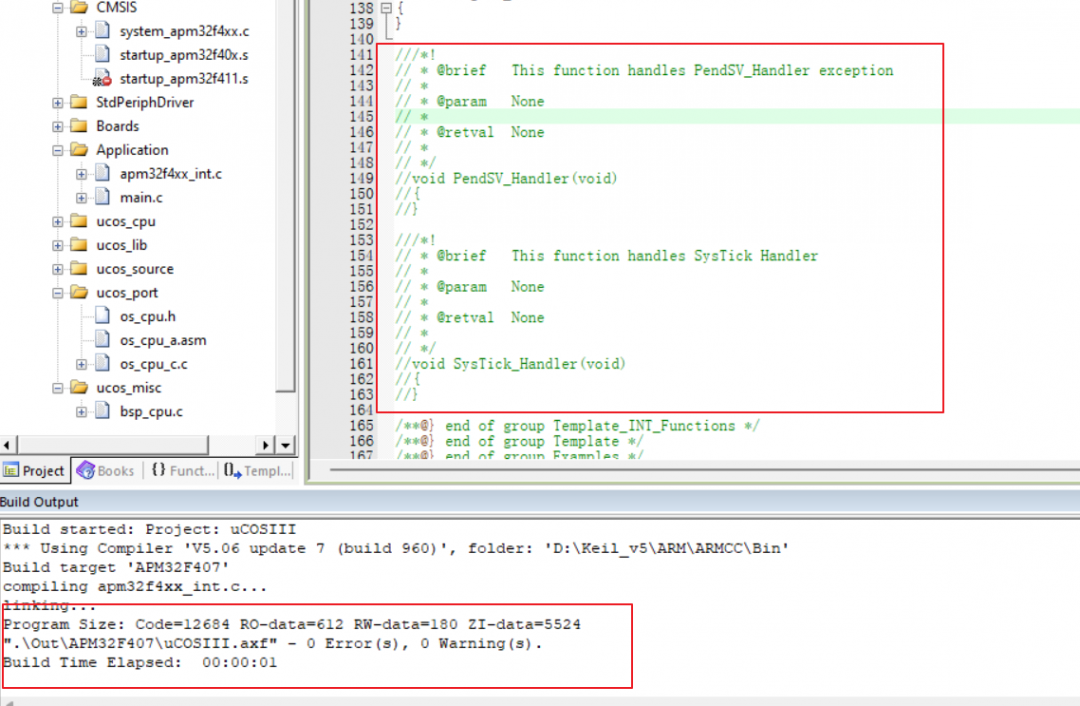
编译无误,下载代码。
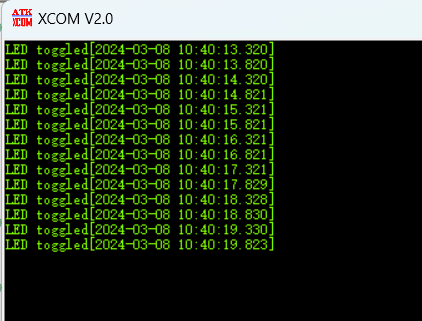
可以看到LED每隔0.5s翻转一次,当 LED的状态变化时,串口都会打印一串信息。(这里LED翻转的现象就不上传了)
注:文章作者在原帖中提供了例程文件,有需要请至原文21ic论坛下载
原文地址:https://bbs.21ic.com/icview-3364670-1-1.html
或点击下方 阅读原文 跳转
↑↑↑ 点击上方卡片关注极海 ↑↑↑



