


----追光逐电 光引未来----
简介
随着数字摄像设备的广泛应用,相机已经越来越发展成为电子产品的核心竞争力。模组是相机中最核心的组成器件。由于光学特性和各种制作工艺的影响,模组直接获得的原始图像往往会有中心到四周的色彩和亮度不一致的现象,如图1所示,这种现象叫做镜头阴影(Lens Shading)。按照其成因可以分为vignetting和color shading,vignetting是中心亮而四周偏暗的现象,color shading的表现是色彩不一致。相机中的图像信号处理单元(Image Signal Processor,ISP)一般会使用镜头阴影校正模块(Lens Shading Correction, LSC)来补偿这种现象,使图像的中心与四周的色彩和亮度保持一致。

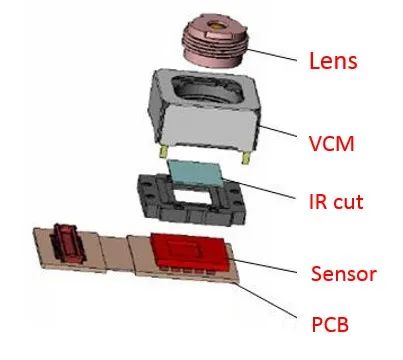
为了便于理解镜头阴影的成因,先简单介绍一些光学模组的基础知识。光学模组包含透镜(Lens)、音圈马达(VCM)、红外截止滤光片(IR cut filter)、图像传感器(Sensor)、印制电路板(PCB)。其中透镜、红外截止滤波片、图像传感器是摄像头的核心器件,也是引起镜头阴影的主要因素。
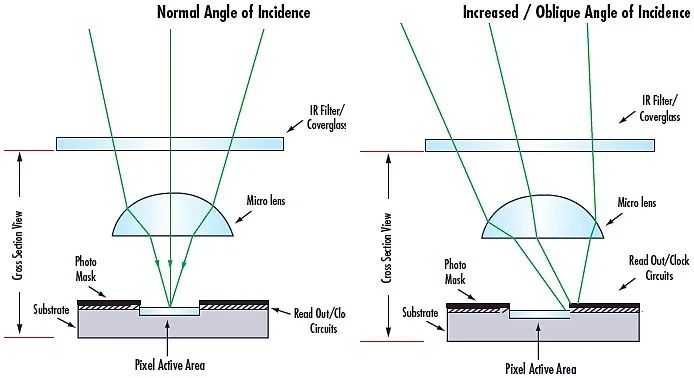
随着镜头的长度做得越来越短,到达图像传感器(sensor)的光线角度变得越来越大,每个像素前面都有一个微镜头(microlens),其功能是将来自不同角度的光线汇聚到该像素上。然而随着像素偏离轴心线的距离变大,一些具有较大入射角的光线将不能够汇聚在像素上,导致边缘像素接收到的部分光线衰减。业内使用CRA(Chief Ray Angle)来定义可以聚焦到像素上的最大角度。透镜和图像传感器(具体来说是microlens)都有CRA参数,要求透镜CRA和传感器CRA曲线基本匹配,相同视场下两者偏差不能超过3度。
镜头阴影的成因
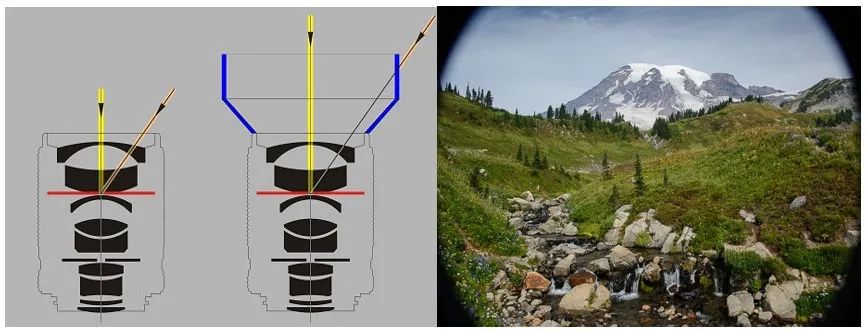
使用了不合适的配件,比如滤镜(filter),遮光罩等,也会导致图像四角出现阴影。图4示意了镜头的遮光罩太窄导致的镜头阴影。
数码相机还存在pixel vignetting,如图5所示。靠近传感器中心的像素能够接收90度入射的光线,而处于传感器边缘的像素接收到的光线大大减少。
Color shading的成因
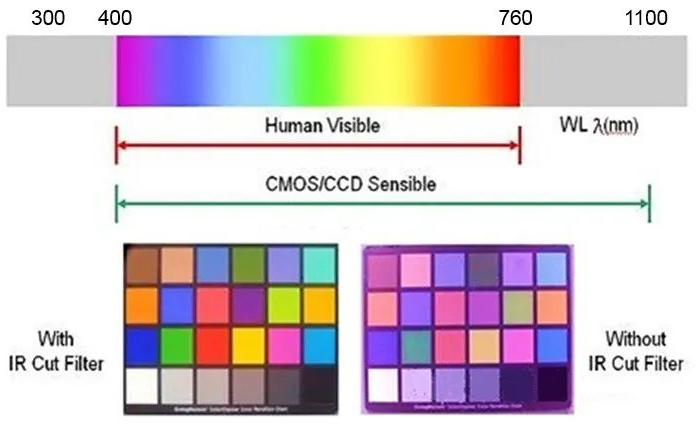
人眼可见光的波长范围约是400nm ~ 760nm,低于400nm或高于760nm的光线人眼不可见,但是成像元器件CCD和CMOS对红外线很敏感,导致相机最终还原出的颜色与人眼所见相比存在颜色差异。所以一般在镜头和图像传感器之间装有红外截止滤波片(IR cut filter),来减少红外光对图像色彩的影响。
普通的IR cur filter在可见光区域有较高透过率,在红外区域透过率较低。但是其允许透过的波长范围会随着光线的入射角发生偏移,比如入射角是30度时偏移达到30nm左右,导致图像中心和四角的光谱不同,形成色彩不一致的现象。
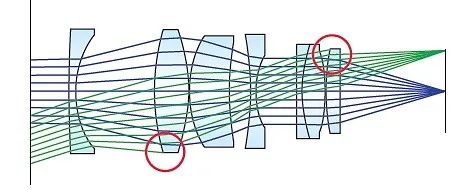
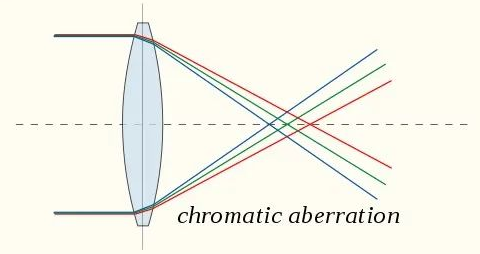
镜头是一个凸透镜,平行光经过凸透镜后会在一段距离后聚焦。然而相比一般的数码相机,手机的空间很有限,镜头很短,焦距也比较短。根据Sellmeier等式,同一传输介质中,不同波长的光有不同的折射率,其经过镜头后的传播方向有差异。因为焦距比较短,有些光线因为聚焦过早所以偏离中心的程度太大,超出了传感器CRA,导致图像传感器无法捕捉到某些波长的光,造成色彩差异。
像素间的串扰,如图8所示,位于传感器边缘且光线入射角较大的像素间更容易出现这种串扰。这意味着感光基元(photosites)间不再是相互独立的,而是会有其他波长的光进入,从而会造成图像色彩异常。所以一般要求透镜CRA小于等于传感器CRA,避免光线折射到周边的像素,减少像素间串扰。
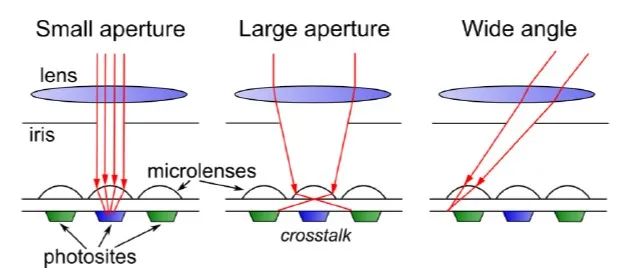
图8 像素间的串扰
镜头阴影校正的常见方法
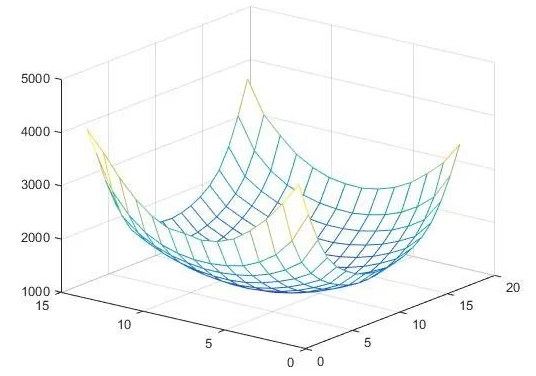
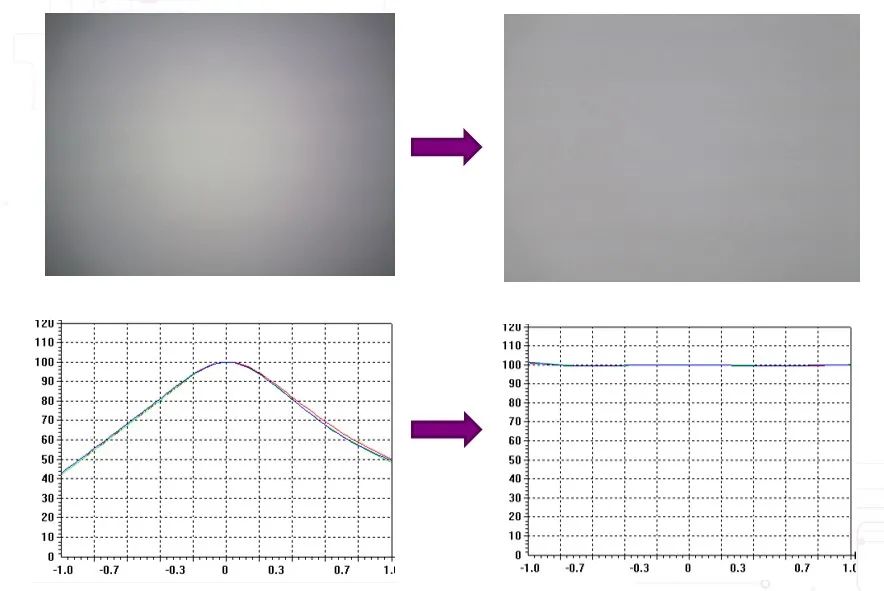
图10 镜头阴影校正的结果
两种常用的镜头阴影校正方法:
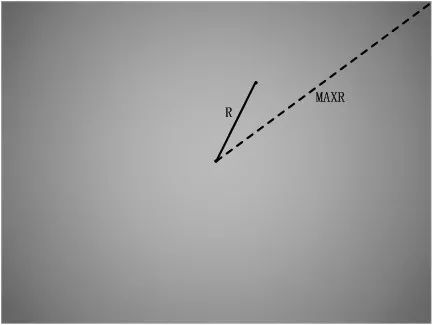
Radial shading correction
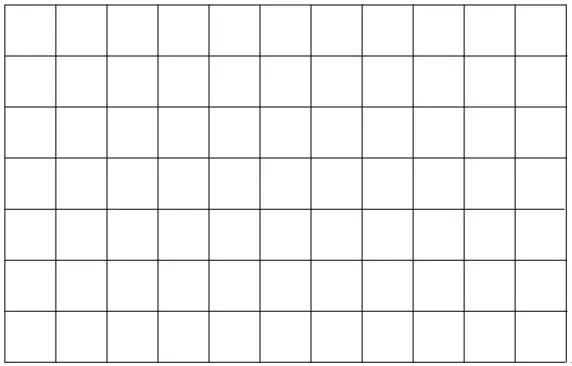
Mesh shading correction

申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


