


前言:
这篇文章,我将手把手地教你怎么看芯片的数据手册,并根据时序图写出对应的驱动代码。以AT24C02这个模块为例,这款芯片是使用I2C协议通信的一款EEPROM模块。
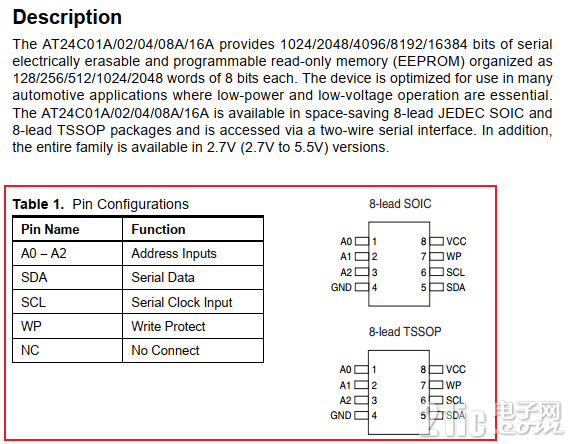
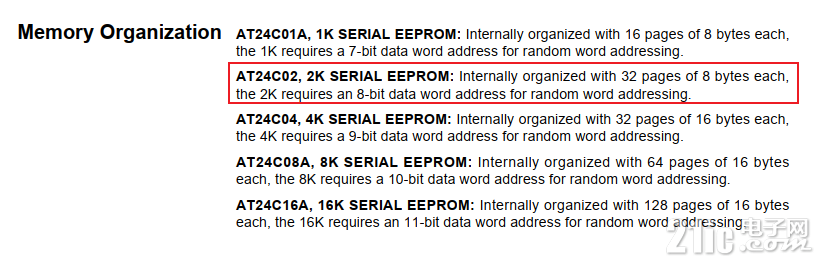
| 型号 | 内部组织 | 随机字地址位 | 设备地址位配置 | 读/写选择位 |
| AT24C01A | 16页,每页8字节 | 7位 | 1 0 1 0 A2 A1 A0 | 第8位 |
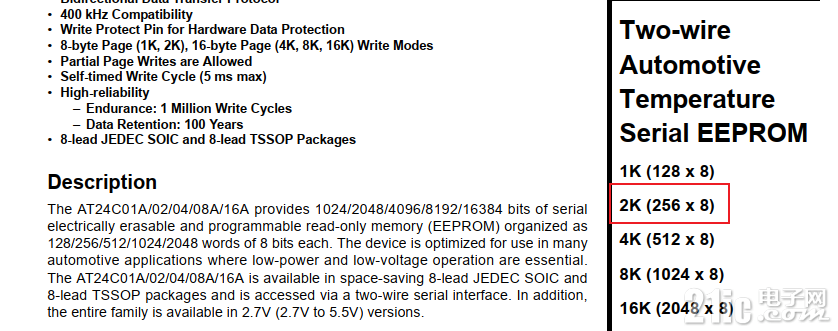
| AT24C02 | 32页,每页8字节 | 8位 | 1 0 1 0 A2 A1 A0 | 第8位 |
| AT24C04 | 32页,每页16字节 | 9位 | 1 0 1 0 A2 A1 - | 第8位 |
| AT24C08A | 64页,每页16字节 | 10位 | 1 0 1 0 A2 - - | 第8位 |
| AT24C16A | 128页,每页16字节 | 11位 | 1 0 1 0 - - - | 第8位 |
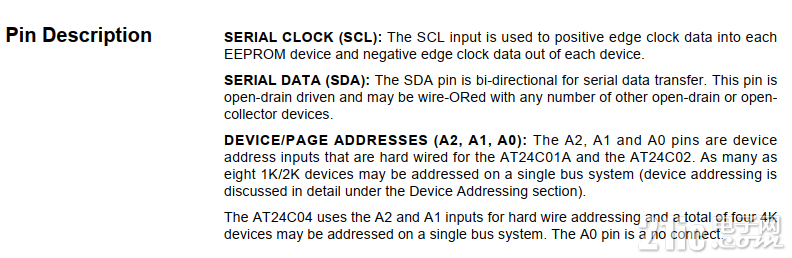
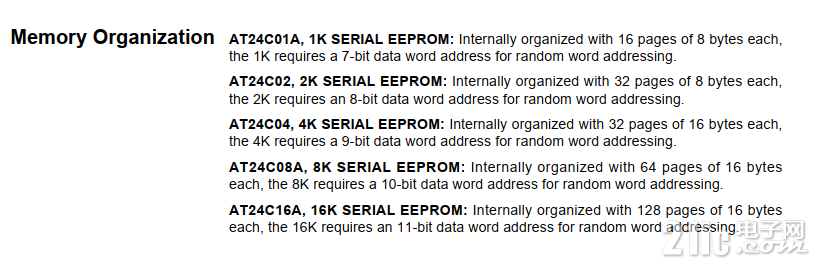
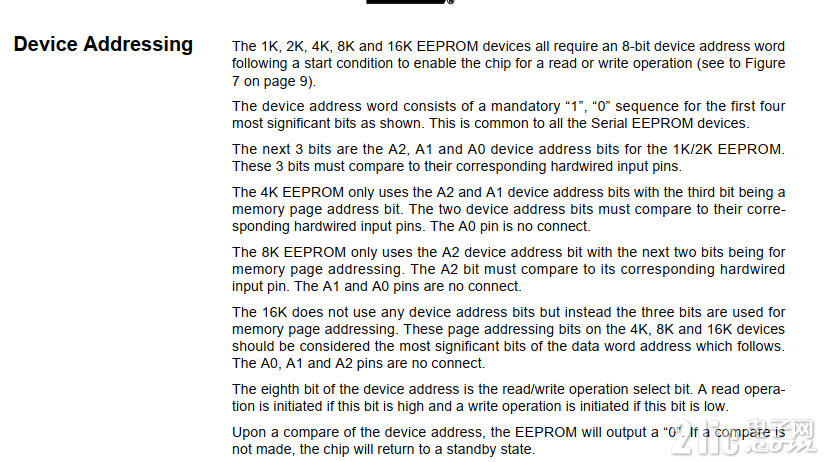
说明:
- 读/写选择位:第8位用于选择读或写操作。如果该位为高,则为读操作;如果为低,则为写操作。
一般来说,AT24CXX系列EEPROM的器件地址取决于具体的型号和配置。通常,AT24CXX的器件地址是由固定部分和可配置部分组成:
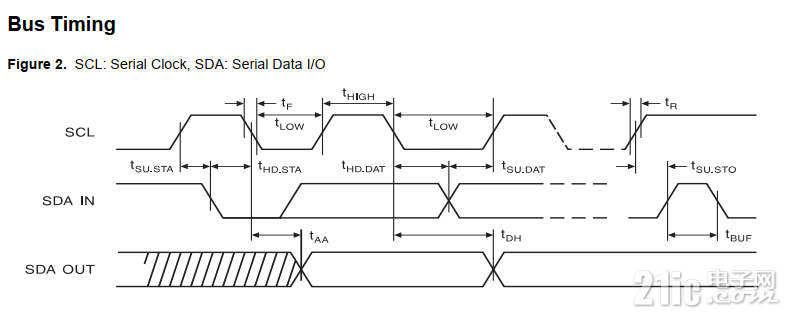
一般我们使用某个模块进行通信,主要就是遵循该芯片的通信协议,根据该协议的时序实现数据接发收。
AT24C02的手册上已经将I2C协议的通信时序列举出来了,下面根据这些时序实现功能。
void I2C_Init(void){GPIO_Config_T gpioConfig;RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_GPIOB); //使能GPIOBgpioConfig.pin = I2C_PIN_SCL|I2C_PIN_SDA;gpioConfig.mode = GPIO_MODE_OUT_PP ; //推挽输出gpioConfig.speed = GPIO_SPEED_50MHz;GPIO_Config(GPIOB, &gpioConfig);GPIO_SetBit(GPIOB,I2C_PIN_SCL|I2C_PIN_SDA); //PB6,PB7置高电平}
2.1 start/stop通信时序的实现
对于任一协议来说,时序的改变,无非就是引脚拉高或拉低嘛,我们主要操作GPIO进行引脚电平切换就行了。
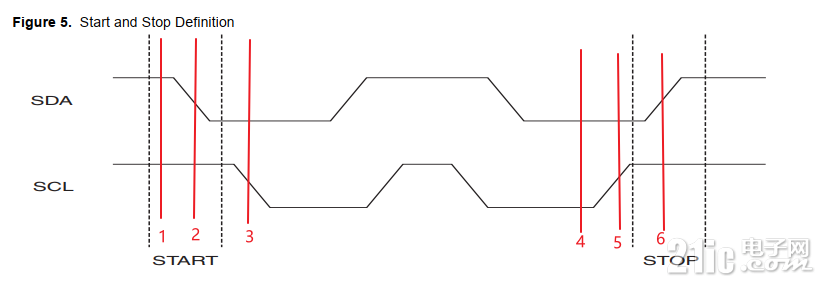
| 状态 | 描述 | 代码 |
| 1 | 初始状态 | I2C_SDA_SET; I2C_SCL_SET; |
| 2 | SDA拉低 | I2C_SDA_RESET; |
| 3 | SCL拉低 | I2C_SCL_RESET; |
| 4 | 初始状态 | I2C_SCL_RESET; I2C_SDA_RESET; |
| 5 | SCL拉高 | I2C_SCL_SET; |
| 6 | SDA拉高 | I2C_SDA_SET; |
实际实现的代码如下:
void I2C_Start(void){SDA_OUT(); //SDA输出,由主机发送start,设置为输出模式I2C_SDA_SET;I2C_SCL_SET;Delay_us(4);I2C_SDA_RESET;Delay_us(4);I2C_SCL_RESET;}
void I2C_Stop(void){SDA_OUT(); //SDA输出,由主机发送stop,设置为输出模式I2C_SCL_RESET;I2C_SDA_RESET;Delay_us(4);I2C_SCL_SET;I2C_SDA_SET;Delay_us(4);}
| 状态 | 描述 | 代码 |
| 1 | 初始状态 | I2C_SCL_RESET; I2C_SDA_RESET; |
| 2 | 拉高SCL | I2C_SCL_SET; |
| 3 | 拉低SCL | I2C_SCL_RESET; |
| 4 | 准备下一次数据传输 |
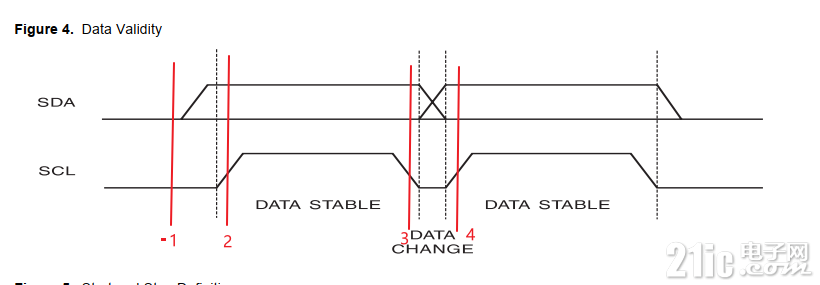
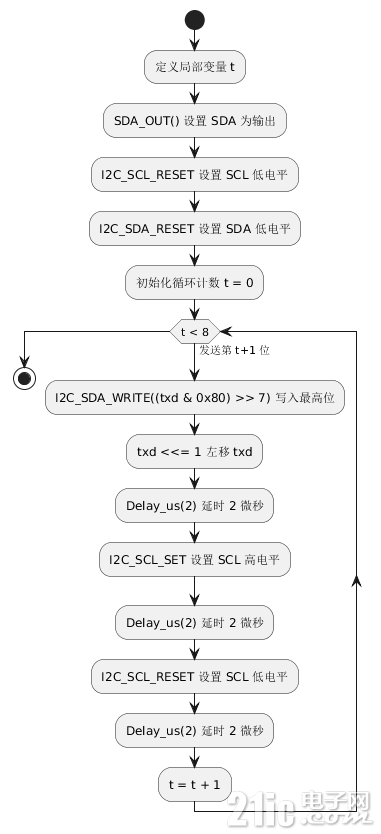
void I2C_Send_Byte(uint8_t txd){uint8_t t;SDA_OUT();I2C_SCL_RESET;I2C_SDA_RESET;// 发送8次for (t = 0; t < 8; t++){I2C_SDA_WRITE((txd & 0x80)>>7);txd <<= 1;Delay_us(2);I2C_SCL_SET;Delay_us(2);I2C_SCL_RESET;Delay_us(2);}}
上面的表格只列举出了实现的时序,并没有加入SDA数据发送的操作,其实,时序图上已经很明确了。
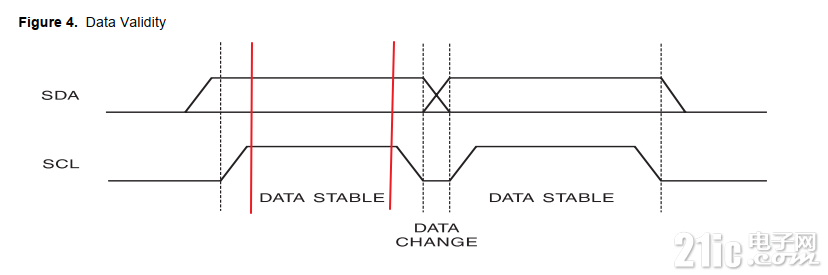
当SCL线处于高电平时,这时SDA当前的电平状态就是SDA发送的数据。我们代码已经实现了这个功能,也就是在SCL拉高之前,先设置SDA引脚的电平状态,当SCL拉高之后,当前SDA的电平就是发送的数据。这里只发送了一位,所以还需要进行7次的操作,这样从高位到低位一位一位地发送,就实现了I2C发送一个字节的功能。
2.3 ACK通信时序实现
| 状态 | 描述 | 代码 |
| 1 | 初始状态 | I2C_SCL_RESET; I2C_SDA_RESET; |
| 2 | SCL拉高 | I2C_SCL_SET; |
| 3 | SCL拉低 | I2C_SCL_RESET; |
实现代码如下:
void I2C_Ack(void){SDA_OUT();I2C_SCL_RESET;I2C_SDA_RESET;Delay_us(2);I2C_SCL_SET;Delay_us(2);I2C_SCL_RESET;}
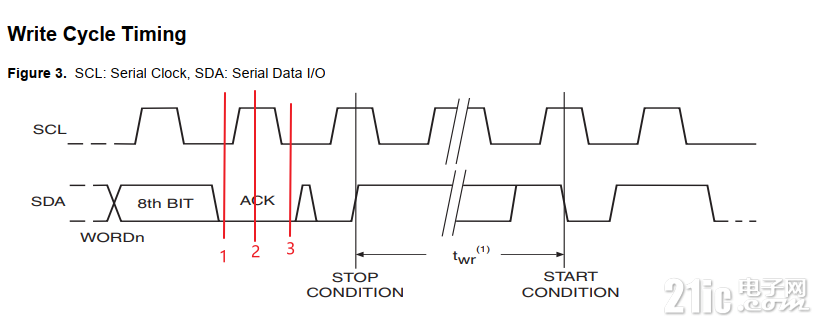
| 描述 | 代码 | |
| 1 | 初始状态 | I2C_SCL_RESET; I2C_SDA_RESET; |
| 2 | 拉高SCL | I2C_SCL_SET; |
| 3 | 拉低SCL | I2C_SCL_RESET; |
| 4 | 准备下一次数据读取 |
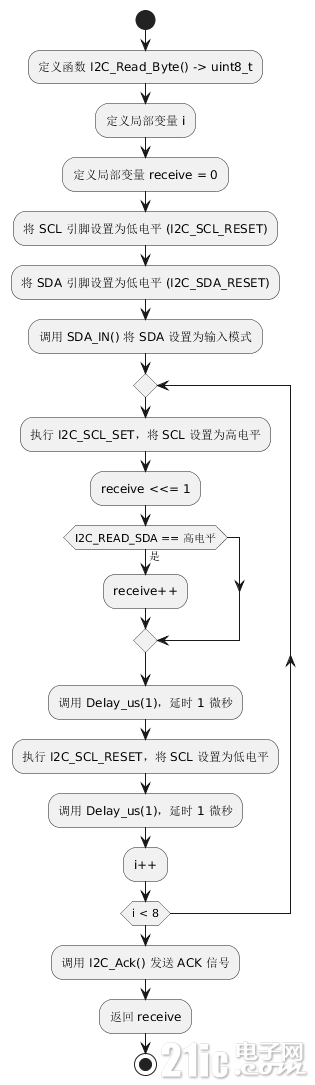
uint8_t I2C_Read_Byte(void){unsigned char i,receive=0; // receive 默认值为0I2C_SCL_RESET;I2C_SDA_RESET;SDA_IN(); //SDA设置为输入for (i = 0; i < 8; i++ ){I2C_SCL_SET;receive <<= 1;if(I2C_READ_SDA){receive++;}Delay_us(1);I2C_SCL_RESET;Delay_us(1);}I2C_Ack(); //发送ACKreturn receive;}
上面我们注意到,时序都是同一个,只不过实现的代码不一样,一个是发送,一个是接收。
这里的操作,是因为读取的SDA引脚如果是高电平(也就是“1”),这里也同步加1(默认是0),这样就确保了数据接收的一致性。
2.5 WaitAck通信时序实现
手册上只有Ack时序,并没有关于WaitAck相关的部分,我们可以设计一下,怎么实现WaitAck这部分。首先分析一下,Ack信号,其实就是在一个I2C的时钟周期内,SDA电平一直稳定为低电平,在了解这部分后,我们就可以实现这部分的代码了。
代码实现如下:
uint8_t I2C_Wait_Ack(void){SDA_IN(); //SDA设置为输入I2C_SDA_SET;Delay_us(1);I2C_SCL_SET;Delay_us(1);while(I2C_READ_SDA){}I2C_SCL_RESET; //时钟输出0return 0;}
等待Ack响应,就是由另一个I2C模块发送Ack信号嘛,所以我们这里将SDA引脚设置为输入状态,一直监听SDA引脚,等待它拉低。
这里也存在一个问题,也就是如果接收不到Ack信号,整个I2C就会一直占用总线,造成总线繁忙,所以,我们可以改一下代码,在里面加一些定时操作,如果在某段时间内,还没有接收到Ack响应,就停止此次数据传输。
uint8_t I2C_Wait_Ack(void){uint8_t uTime = 0;SDA_IN(); //SDA设置为输入I2C_SDA_SET;Delay_us(1);I2C_SCL_SET;Delay_us(1);while(I2C_READ_SDA){uTime++;if(uTime > 250){I2C_Stop();return 1;}}I2C_SCL_RESET; //时钟输出0return 0;}
| A0 | A1 | A2 | 范围 |
| 0 | 0 | 0 | 第1页(0~255) |
| 0 | 0 | 1 | 第2页(256~511) |
| 0 | 1 | 0 | 第3页(512~767) |
| 0 | 1 | 1 | 第4页(768~1023) |
| 1 | 0 | 0 | 第5页(1024~1279) |
| 1 | 0 | 1 | 第6页(1280~1535) |
| 1 | 1 | 0 | 第7页(1536~1791) |
| 1 | 1 | 1 | 第8页(1792~2047) |
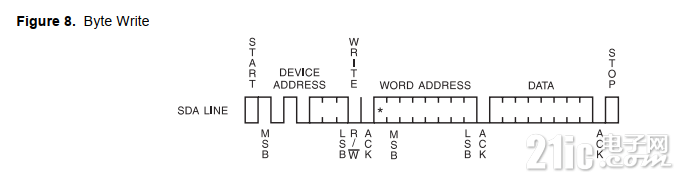
void AT24C02_WriteOneByte(uint16_t WriteAddr,uint8_t DataToWrite){I2C_Start();/*AT24C02 的设备地址为 0XA0,后面的页地址和具体地址的处理是为了正确定位要写入的数据位置。*/I2C_Send_Byte(0XA0+((WriteAddr/256)<<1)); // 发送高地址I2C_Wait_Ack();I2C_Send_Byte(WriteAddr%256); //发送低地址I2C_Wait_Ack();I2C_Send_Byte(DataToWrite); //发送字节I2C_Wait_Ack();I2C_Stop();//产生一个停止条件Delay_ms(10);}
void AT24C02_Write(uint16_t WriteAddr,uint8_t *pBuffer,uint16_t NumToWrite){while(NumToWrite--){AT24C02_WriteOneByte(WriteAddr,*pBuffer);WriteAddr++;pBuffer++;}}
3.2 读实现(Read)
我们已经实现了写(Write)的代码,读也是类似的。同样我们看这个模块的读时序。
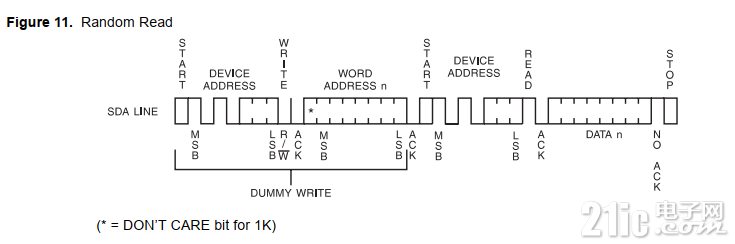
先分析一下,我们可以看到在进行读操作之前,需要先发送设备地址与要读取数据的地址,再进行读操作,下面我们编写代码。
uint8_t AT24C02_ReadOneByte(uint16_t ReadAddr){uint8_t temp=0;I2C_Start();I2C_Send_Byte(0XA0+((ReadAddr/256)<<1)); //发送器件地址0XA0,写数据I2C_Wait_Ack();I2C_Send_Byte(ReadAddr%256); //发送低地址I2C_Wait_Ack();I2C_Start();I2C_Send_Byte(0XA1); //进入接收模式I2C_Wait_Ack();temp=I2C_Read_Byte();I2C_Stop(); //产生一个停止条件return temp;}
同样,我们可以进一步扩展,实现Read操作。
void AT24C02_Read(uint16_t ReadAddr,uint8_t *pBuffer,uint16_t NumToRead){while(NumToRead){*pBuffer++=AT24C02_ReadOneByte(ReadAddr++);NumToRead--;}}
到这里,我们的读写通信时序已经完全实现了。
4、总结
其实,不管是这篇文章的标准I2C通信协议,还是SPI、UART、1-WIRE协议,其本质都是通过一定的物理连接和协议规则,实现设备之间的数据传输和通信。
以上就是今天的分享,如果有需要查看代码、手册的小伙伴,请点击底部“阅读原文”进行下载。

END
