CANopen 是一种基于CAN的通信协议,已在工业领域得到了广泛应用。
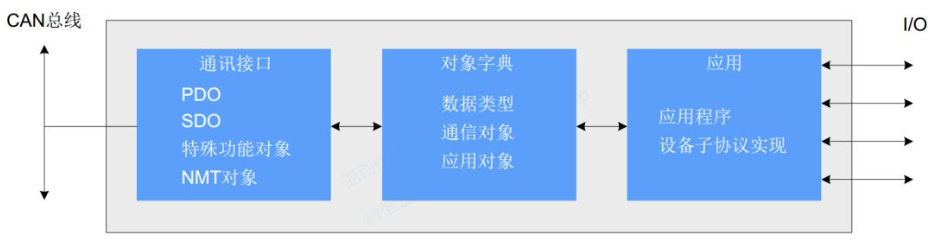
CAN提供可靠的底层数据传输,CANopen提供标准化的应用层协议。在CANopen协议中,每个CANopen设备都有一个对象字典。CANopen设备模型如下图。对象字典描述了CANopen设备的所有行为和参数。
CanFestival是一套开源免费的CANopen协议栈。它功能强大,且提供图像化的对象字典编辑工具。RT-Thread已经将CanFestival制作成软件包。所以只需完善对应驱动就能实现CANopen。
本文将要介绍:在 ES32 平台上,基于 RT-Thread bsp 实现 CANopen 从机的方法。
开启本实验前,读者需要首先了解:
☞本实验基于RT-Thread 4.0.4版本,用户可以从GitHub或Gitee获取:
☆从GitHub下载RT-Thread 4.0.4:https://github.com/RT-Thread/rt-thread/tree/v4.0.4
☆从Gitee下载RT-Thread 4.0.4:https://gitee.com/rtthread/rt-thread/tree/v4.0.4
☞ 基础的软硬件环境配置和ES-CodeMaker使用方法。详细请查看(点击直接打开):工程师笔记 | ES-CodeMaker for RT-Thread (一)快速上手
☞ES-CodeMaker for RT-Thread软件的获取方法,在文本的最后给出。
本实验使用ZLG的USBCAN-E-P作为主站,ES-PDS-ES32F3696LX开发板和ES-PDS-CAN模块作为从机。
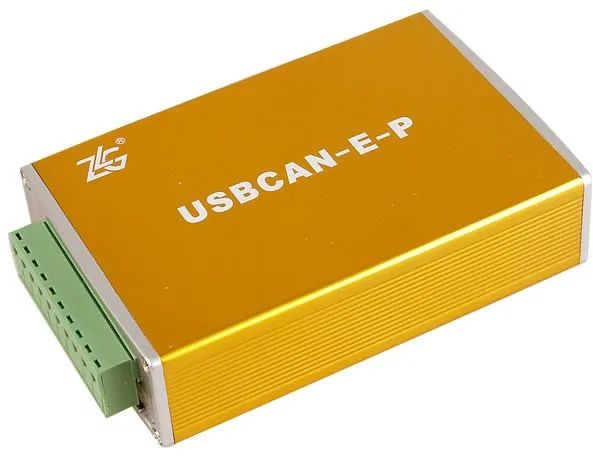
▲CANopen主站卡
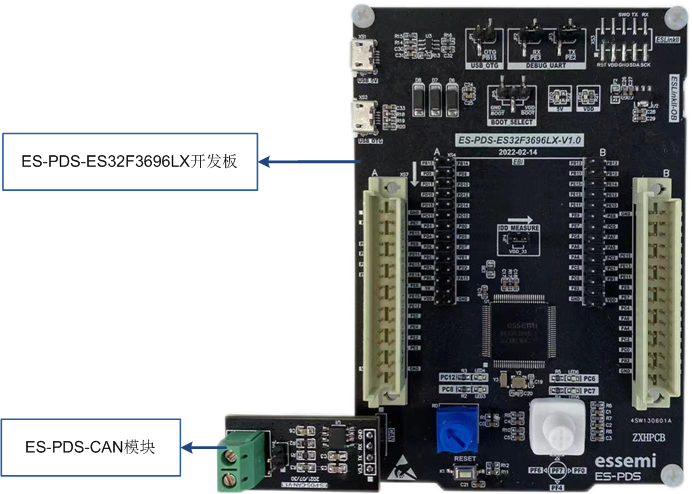
将ES-PDS-CAN模块插入开发板CAN接口上。CAN模块与开发板的连接:
USBCAN-E-P CANopen主站卡与ES-PDS-CAN模块的连接:
ES-PDS-ES32F3696LX开发板上的跳线接口:
1 . 闭合JP4:使开发板为芯片供电。
2 . 闭合JP2、JP3:通过板载调试器将UART2转为串口,方便调试程序。
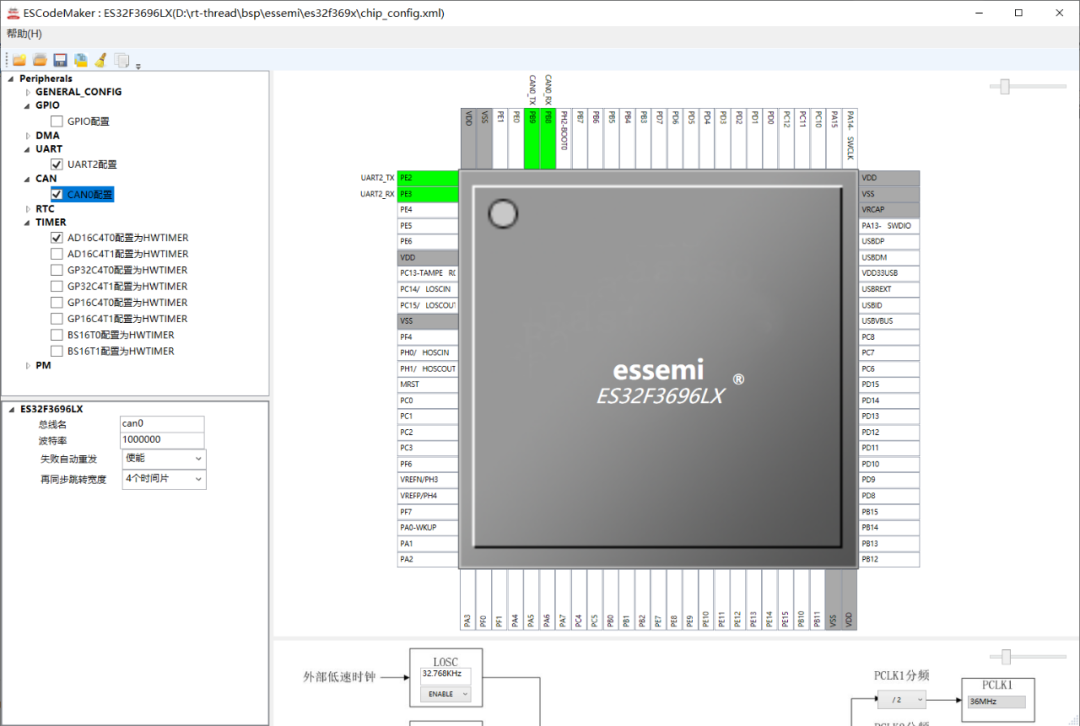
通过ES-CodeMaker可实现可视化的管脚功能配置
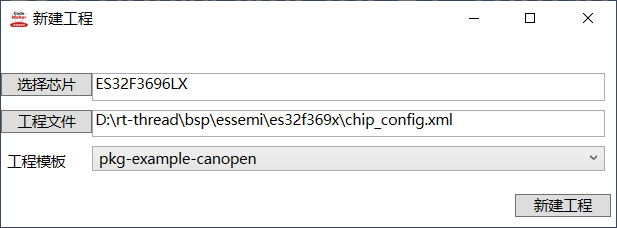
新建工程
选择芯片ES32F3696LX,填写工程名称和路径,选择模板 pkg-example-canopen:
开启 UART2 功能和对应的管脚作为RT-Thread的控制台功能。
开启 CAN0 的管脚: PB8,PB9 ,并选择相应的CAN功能,可以设置can设备的名称。设备配置为:波特率1000000,使能失败自动重发,再同步跳转宽度为4个时间片。
开启 AD16C4T0 作为 HWTIMER ,并选择相应的功能,可以设置hwtimer设备的名称。设备配置为:递增计数模式。
使用RT-Thread env工具配置RT-Thread的内核、组件、软件包和驱动。
1 . 在路径rt-thread-v4.0.4\bsp\essemi\es32f369x中,打开ENV工具
2 . 输入menuconfig配置工程
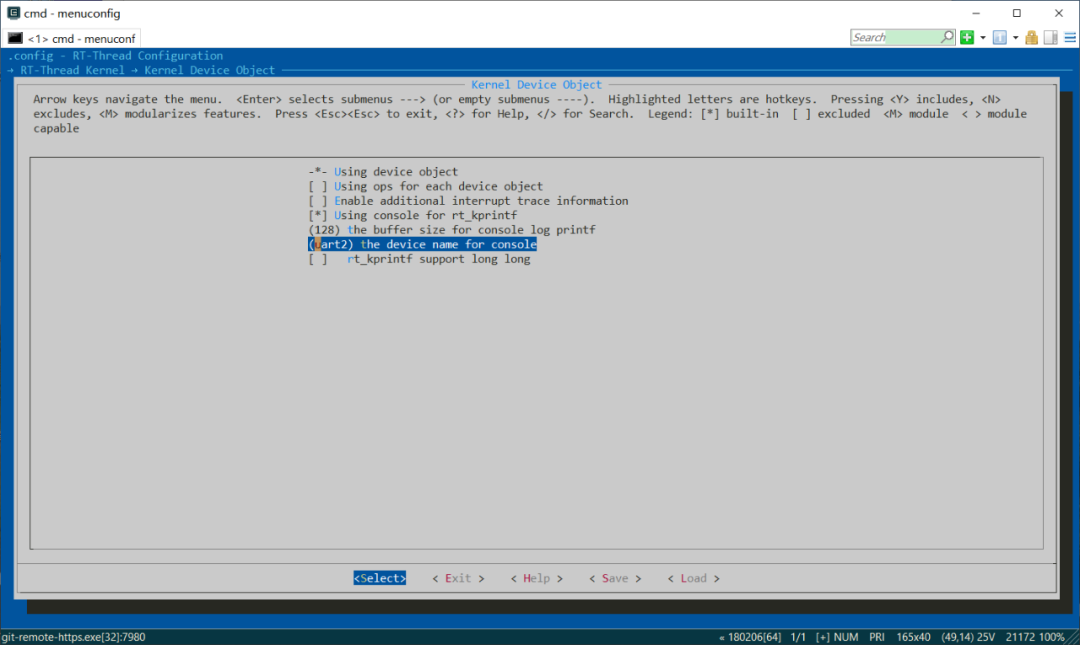
RT-Thread Kernal -> Kernel Device Object 进行内核设备对象设置。将控制台的设备名改为“uart2”。
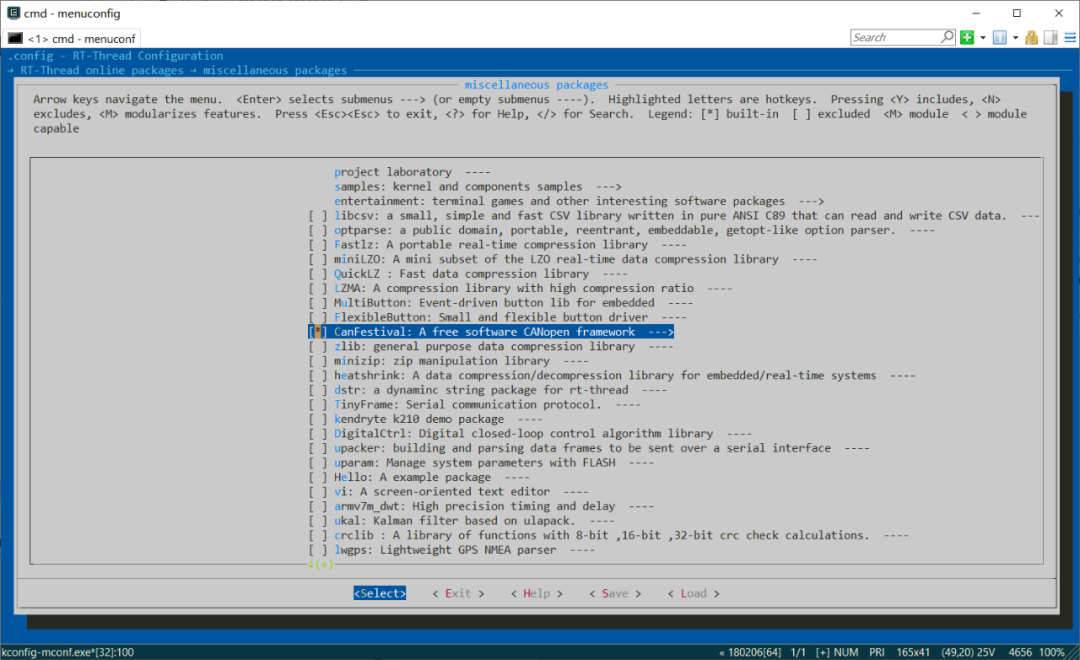
RT-Thread online packages → miscellaneous packages开启CanFestival 软件包,选择版本:v1.0.0。CanFestival是一个开源免费的 CANopen 协议栈。
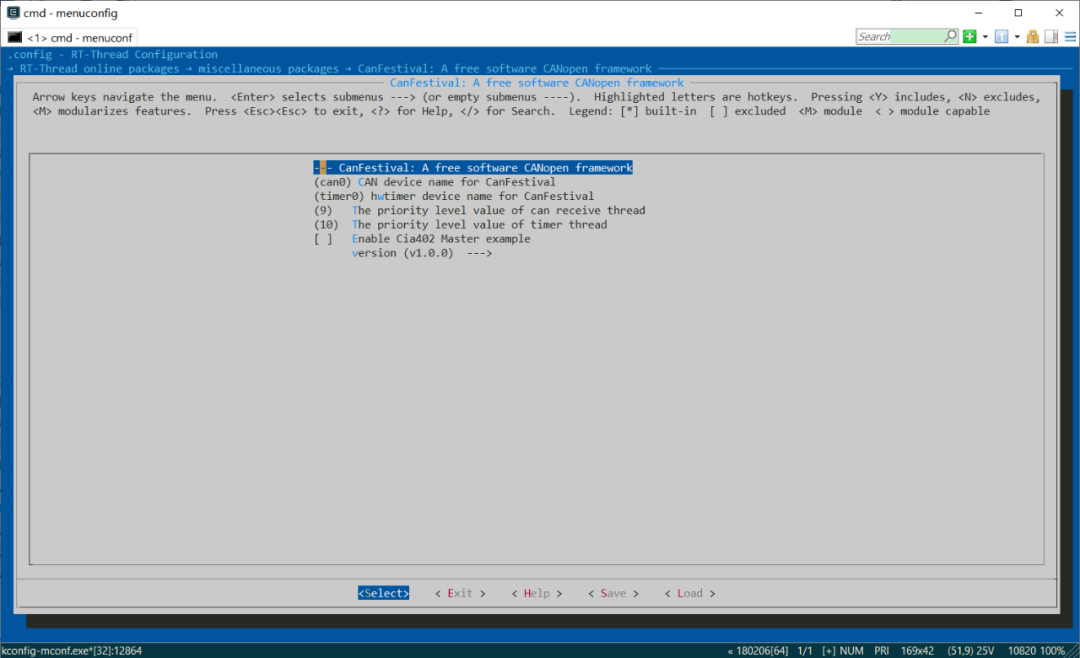
RT-Thread online packages → miscellaneous packages → CanFestival: A free software CANopen framework 打开配置界面。选择can和hwtimer的设备名,及线程的优先级。
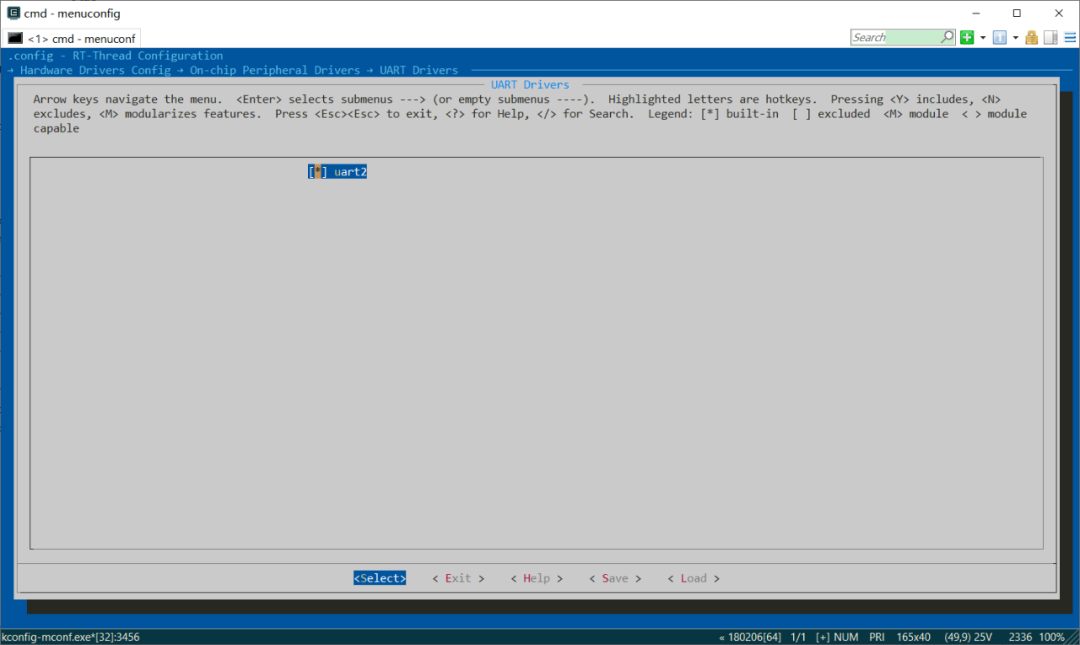
Hardware Drivers Config -> On-chip Peripheral Drivers -> UART Drivers 开启uart2,与RT-Thread控制台通信。
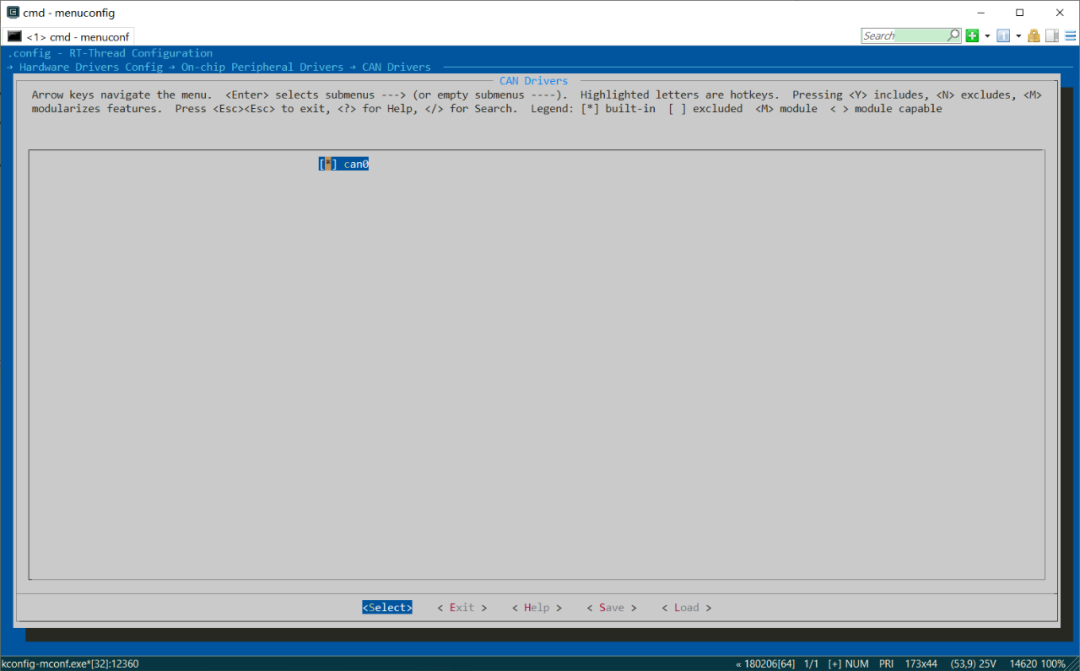
Hardware Drivers Config -> On-chip Peripheral Drivers -> CAN Drivers 开启can0,为CanFestival提供CAN驱动。
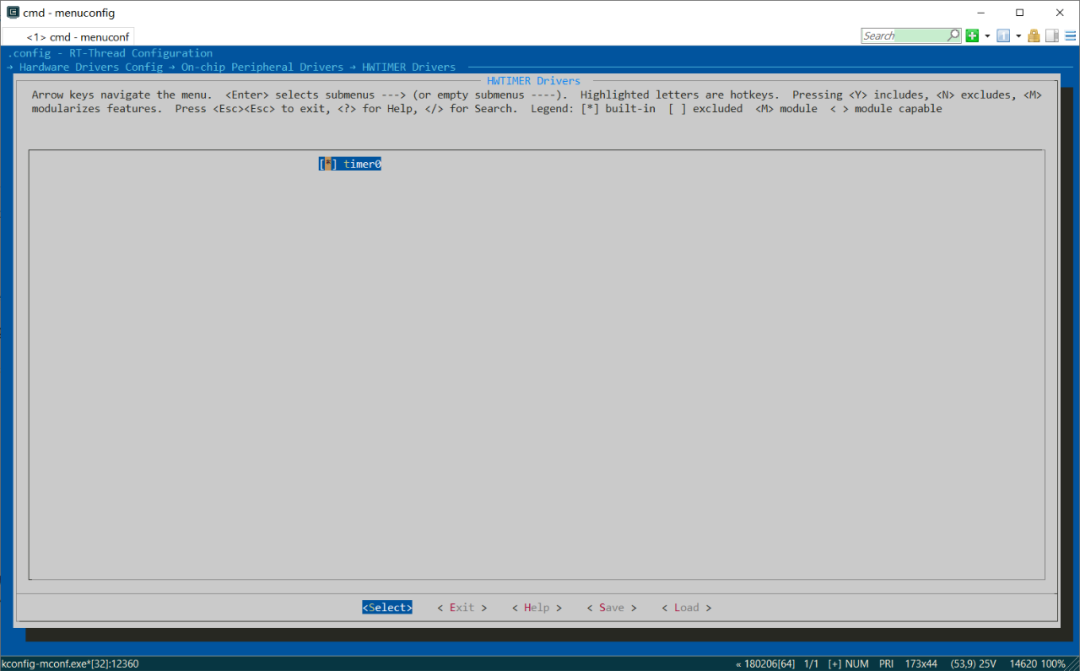
Hardware Drivers Config -> On-chip Peripheral Drivers -> HWTIMER Drivers 开启timer0,为CanFestival提供timer驱动。
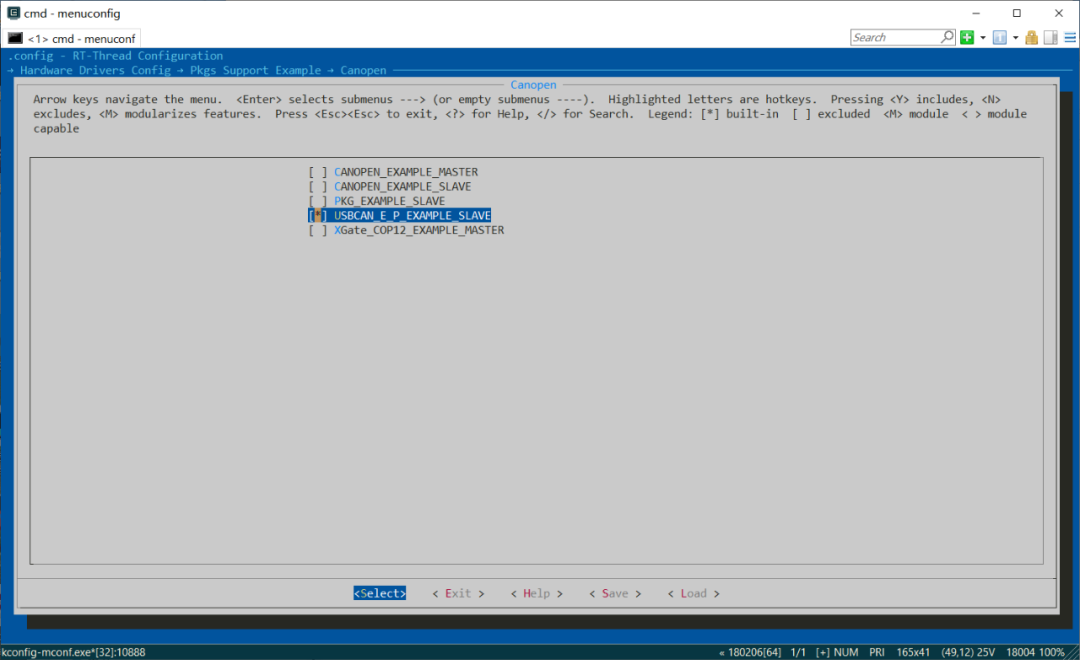
Hardware Drivers Config -> Pkgs Support Example -> Canopen -> USBCAN_E_P_EXAMPLE_SLAVE开启CANopen从机例程。
配置好之后保存退出。
3 . 输入pkgs --update命令更新软件包。然后根据 6. 软件包程序修改说明 优化软件包的部分接口。
4 . 输入scons --target=mdk5命令生成keil5工程。(使用IAR等其他平台指定--target=xxx即可)
5 . 使用Keil5打开工程,编译并下载。
1 . 安装CANopen对象字典编辑工具
CANopen协议的核心是对象字典。由于CANopen的对象字典较为复杂,不建议手写对象字典。CANopen对象字典编辑工具安装方法如下:
☞ 首先获取资源:
☆从官方获取python2.7:
https://www.python.org/downloads/release/python-2715/
☆从官方获取wxPython2.8:
https://sourceforge.net/projects/wxpython/files/wxPython/2.8.12.1/
☆2种获取CANopen源码的方式:
https://bitbucket.org/Mongo/canfestival-3-asc
https://pan.baidu.com/s/1b9K0vIzu_EVWK1BLURJEPQ 提取码为:j2w2
资源获取成功后:
a . 安装python2.7。
b . 安装wxPython2.8。
c . 解压CANopen源码,获得Mongo-canfestival-3-asc-1a25f5151a8d文件夹。
d . 解压Mongo-canfestival-3-asc-1a25f5151a8d\objdictgen\Gnosis_Utils-current.tar.gz,获得Gnosis_Utils-1.2.2.tar。
解压Gnosis_Utils-1.2.2.tar后,获得Gnosis_Utils-1.2.2文件夹。
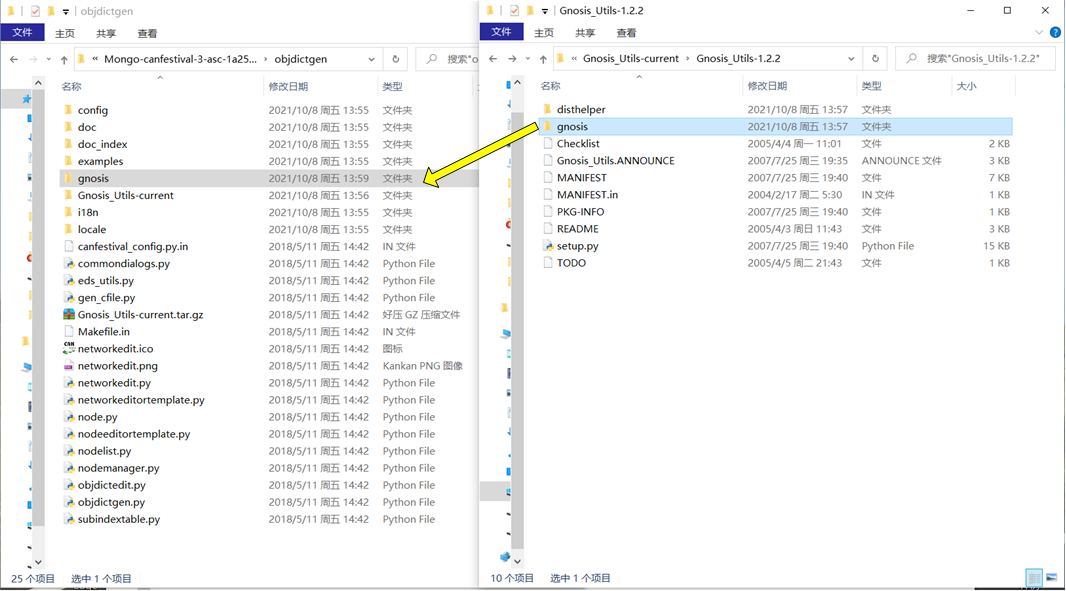
e . 将 Gnosis_Utils-1.2.2\gnosis文件夹,复制到 Mongo-canfestival-3-asc-1a25f5151a8d\objdictgen路径下。如下图所示:
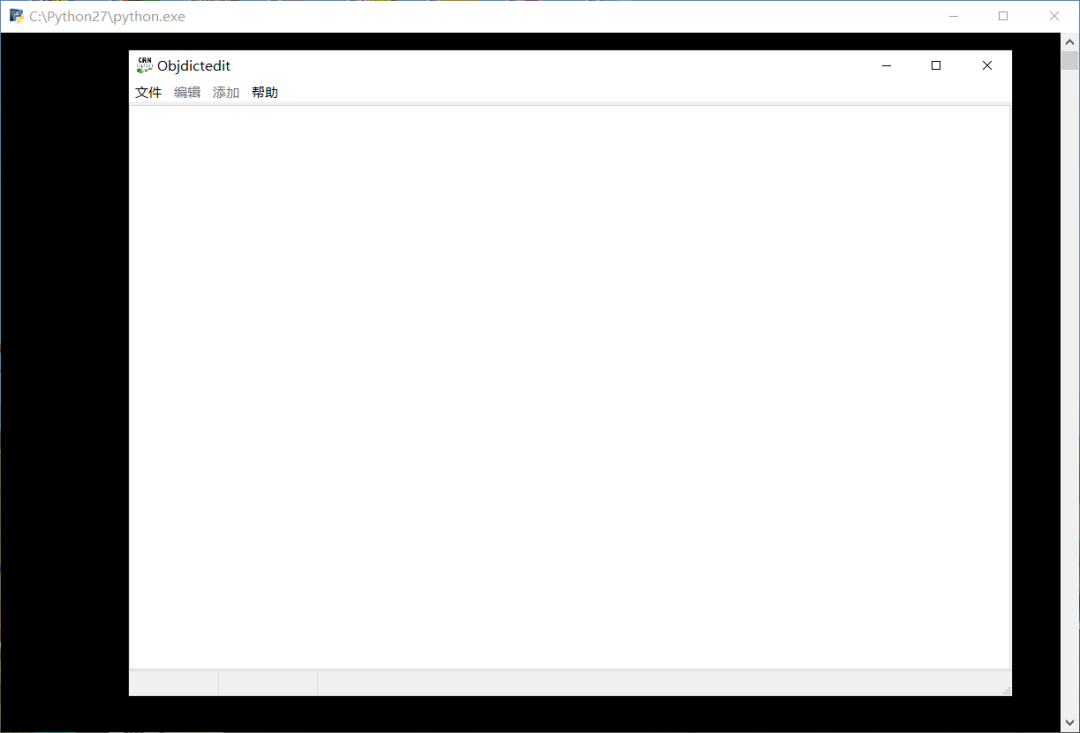
f . 双击 Mongo-canfestival-...\objdictgen\objdictedit.py。
如果安装正常,则会出现以下的界面:
2 . CANopen对象字典编辑工具的使用方法如下:
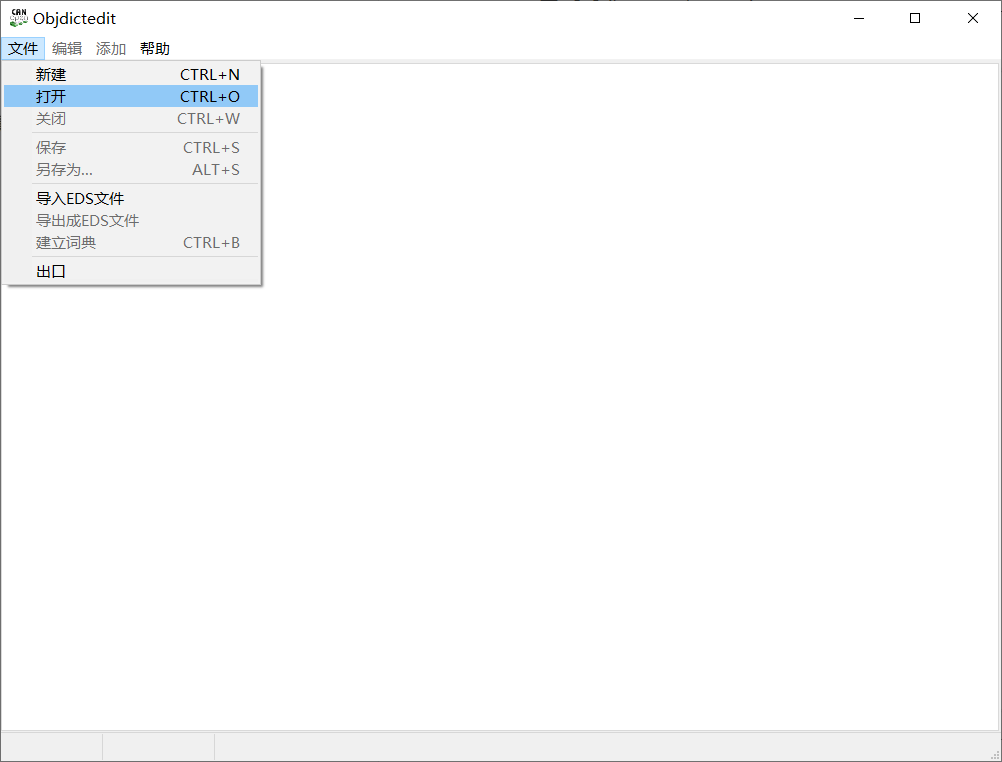
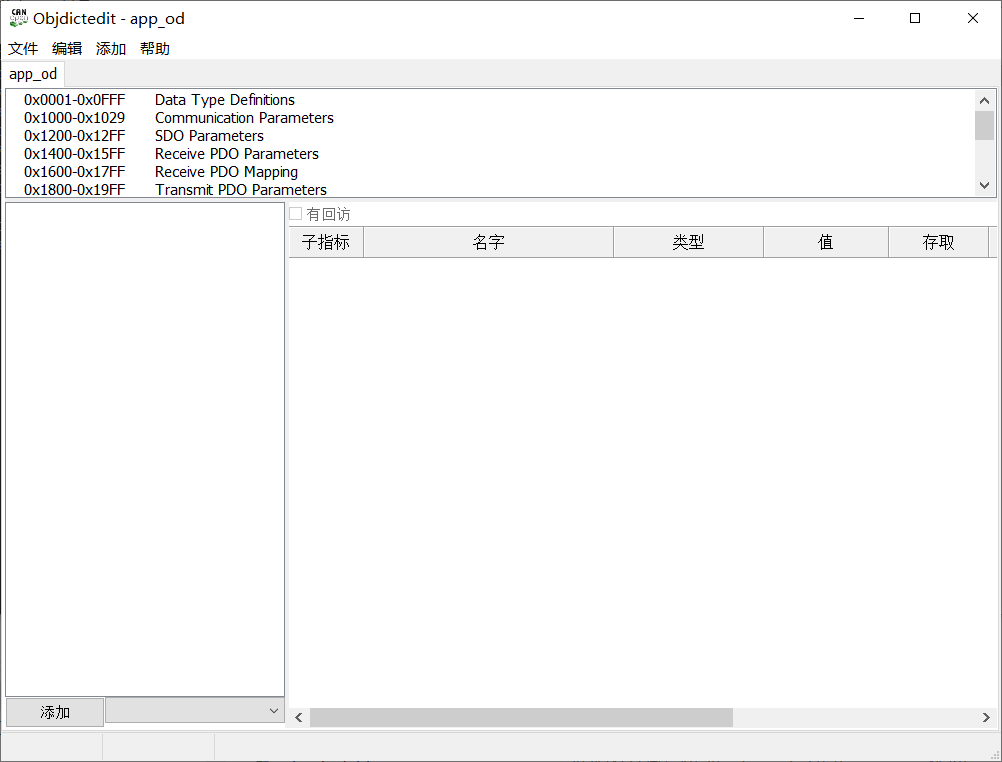
打开bsp中的对象字典。
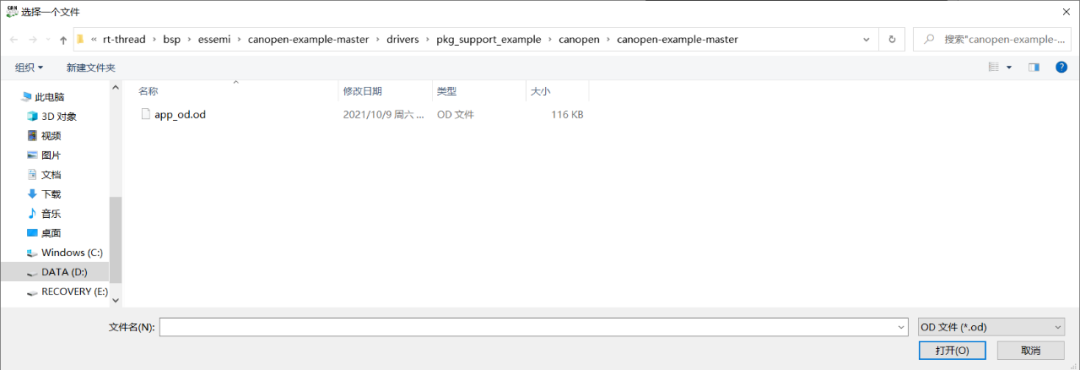
打开对象字典成功后,如下图所示:
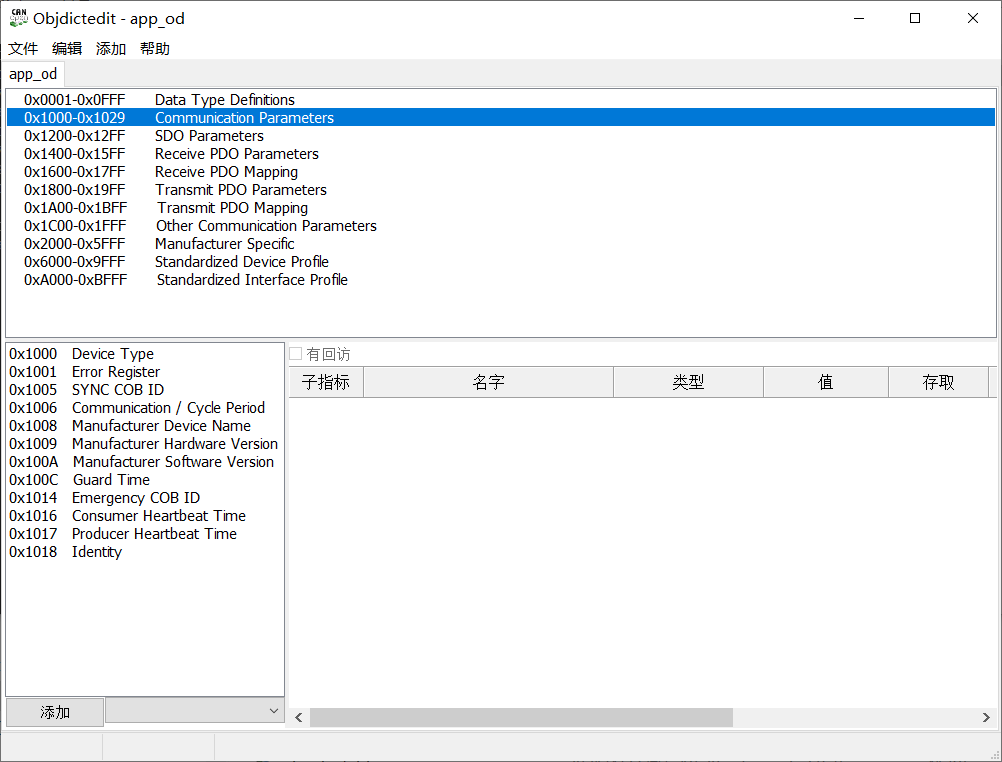
CANopen对象字典各索引范围的描述如下图。
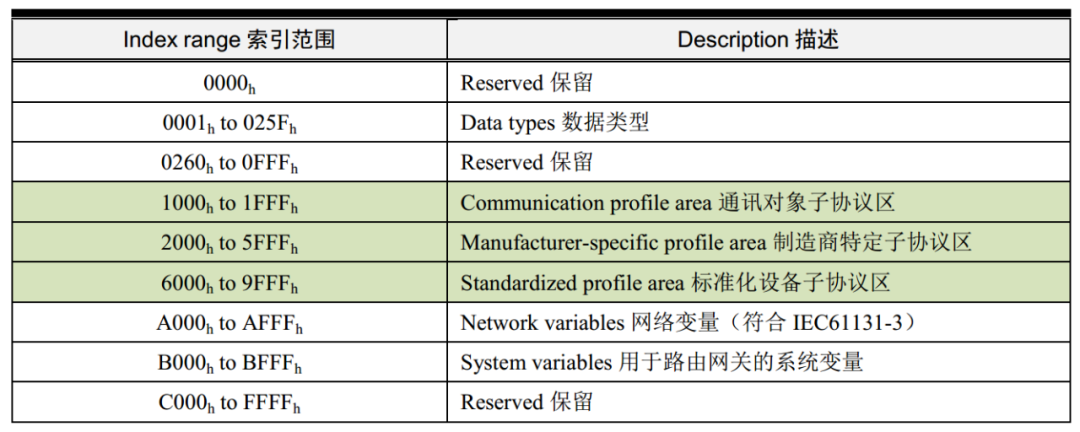
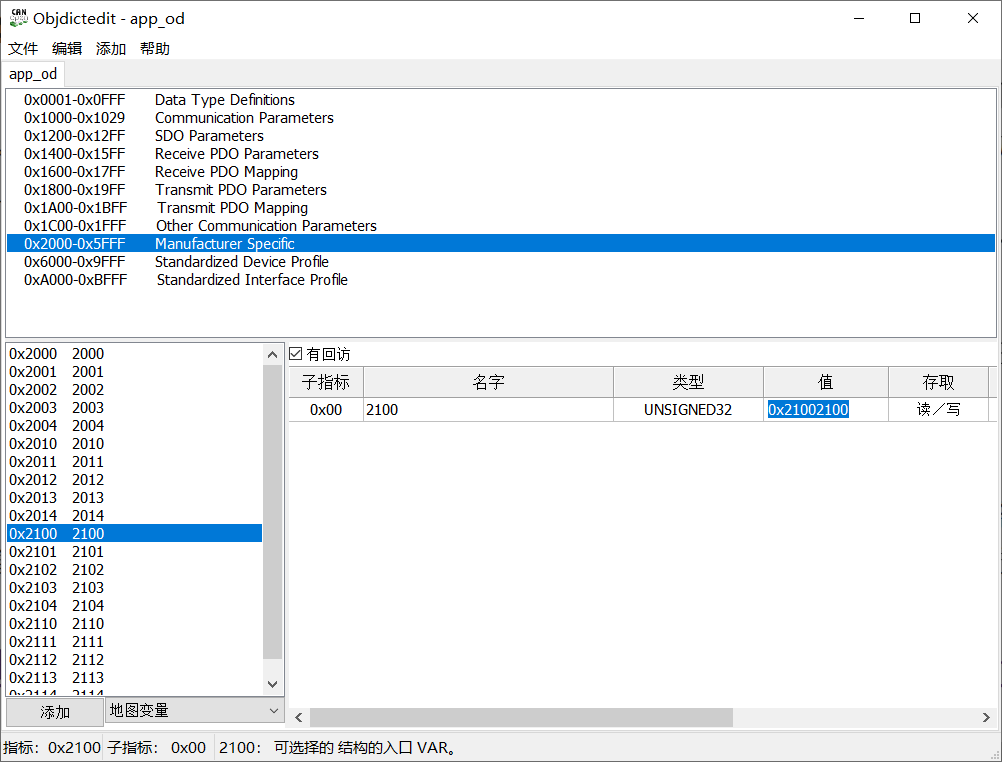
对象字典索引0x2000~0x5FFF的制造商特定自协议区,常被用于存放应用数据。
如下图所示:可以直接通过编辑工具修改对象字典索引0x2100的数据。
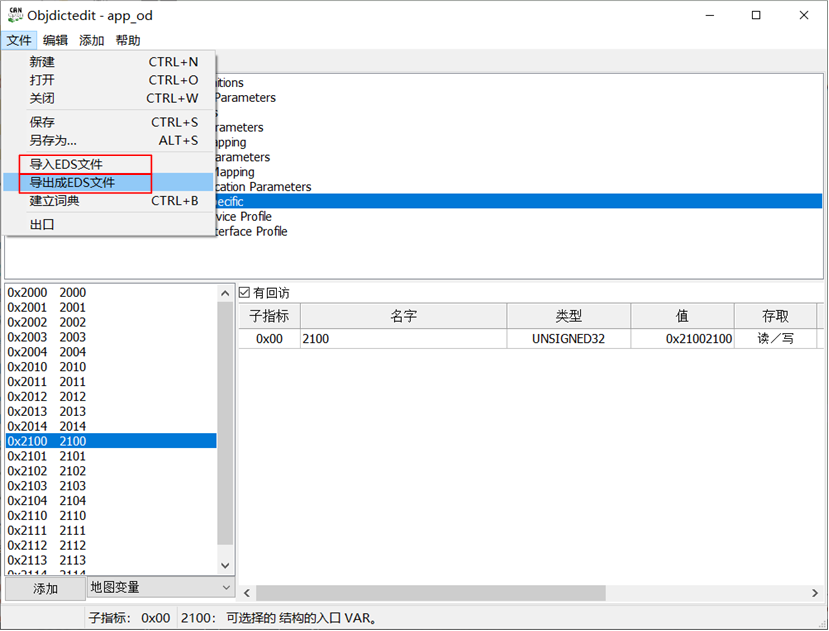
点击【建立字典】后,会生成.c和.h对象字典文件。如果当前打开的是工程内的.od文件,则会更新工程中的对象字典。
点击【导出成EDS文件】后,会生成eds文件。CANopen主机需要用eds文件解析从机。
4 . CANopen从机程序流程。
在CANopen中,PDO为过程数据对象协议,可用于在多节点之间交换即时数据。PDO被分为RPDO和TPDO。RPDO为从机接收数据。TPDO为从机发送数据。
在用例从机对象字典中,有4个RPDO,4个TPDO。在下图中N的取值为1~4。
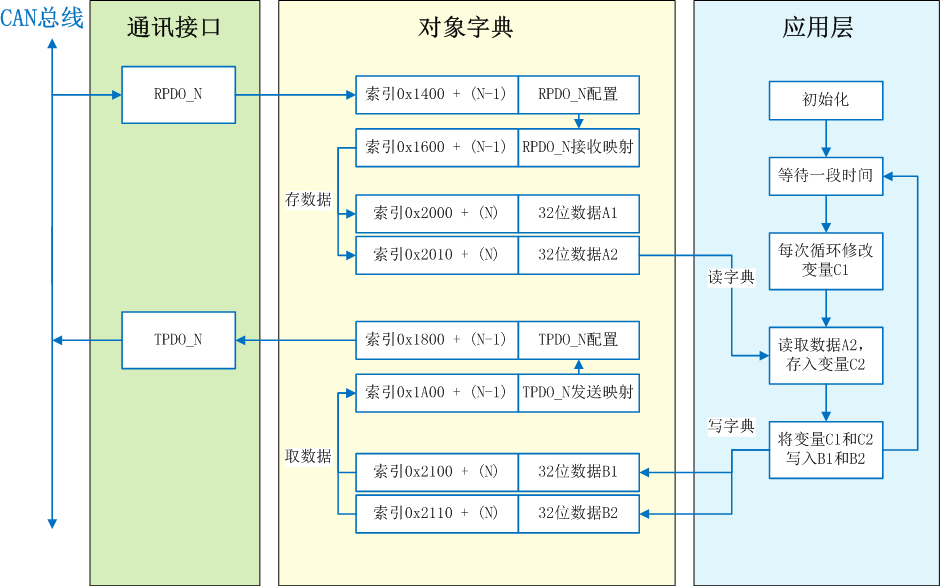
如上图所示,应用层CANopen从机程序流程为:
注意:因为双方的时钟相互独立,存在误差。所以加速了当前使用的硬件定时器,使从机能及时响应主机。
5 . CANopen主站卡环境安装。
本实验用 USBCAN-E-P CANopen主站卡作为CANopen主机,开发板作为CANopen从机。
☞ 从官网获取 USBCAN-E-P 资料:
☆ 获取USBCAN-E-P 的PC端上位机软件安装包:
☆ 获取USBCAN-E-P用户手册:
https://www.zlg.cn/data/upload/software/Can/USBCAN_E_P_CANOpen_um.pdf
☆获取USBCAN-E-P驱动:
https://www.zlg.cn/data/upload/software/Can/USBCAN_E_P_drive.zip
PC端上位机软件安装完成后,获得软件 CANManager for CANopen :

然后根据用户手册,安装USBCAN-E-P驱动。
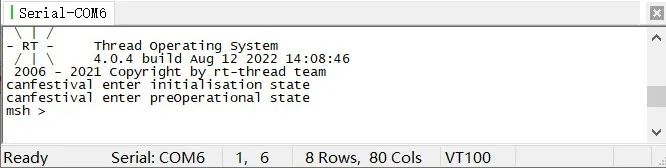
1 .将CANopen从机程序下载后,RT-Thead控制台输出如下信息:
2 . 然后打开CANManager for CANopen。
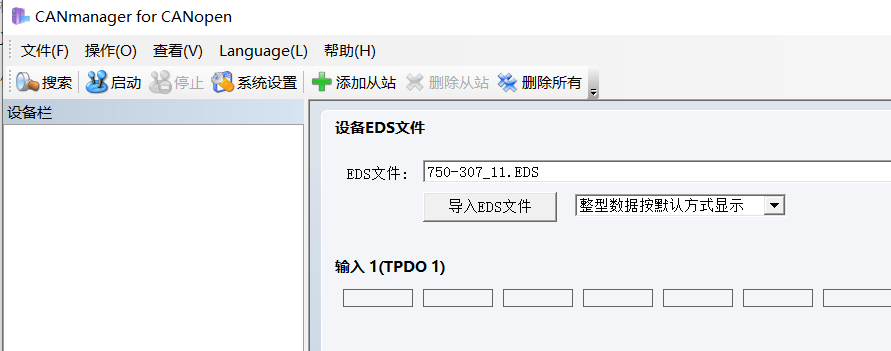
导入CANopen从机的eds。
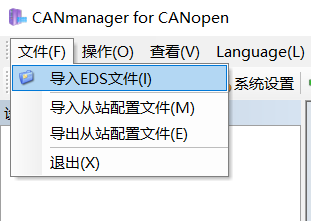
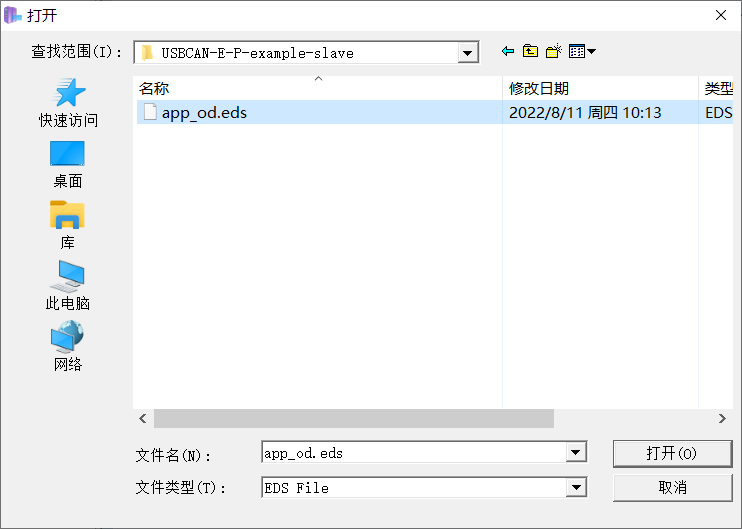
选择从机用例的eds文件。文件路径为:drivers\pkg_support_example\canopen\USBCAN-E-P-example-slave\app_od.eds
点击搜索,开始搜索从机,如下图所示:
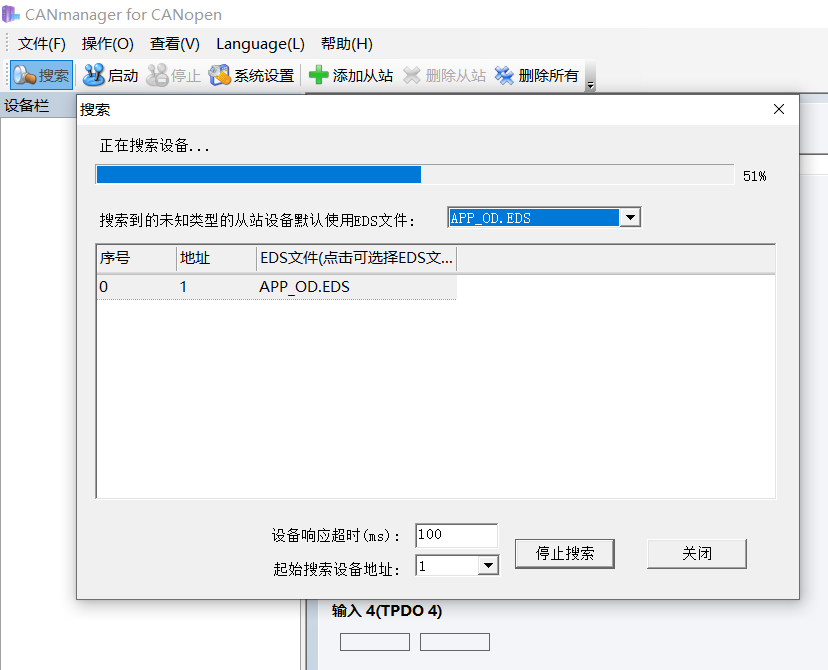
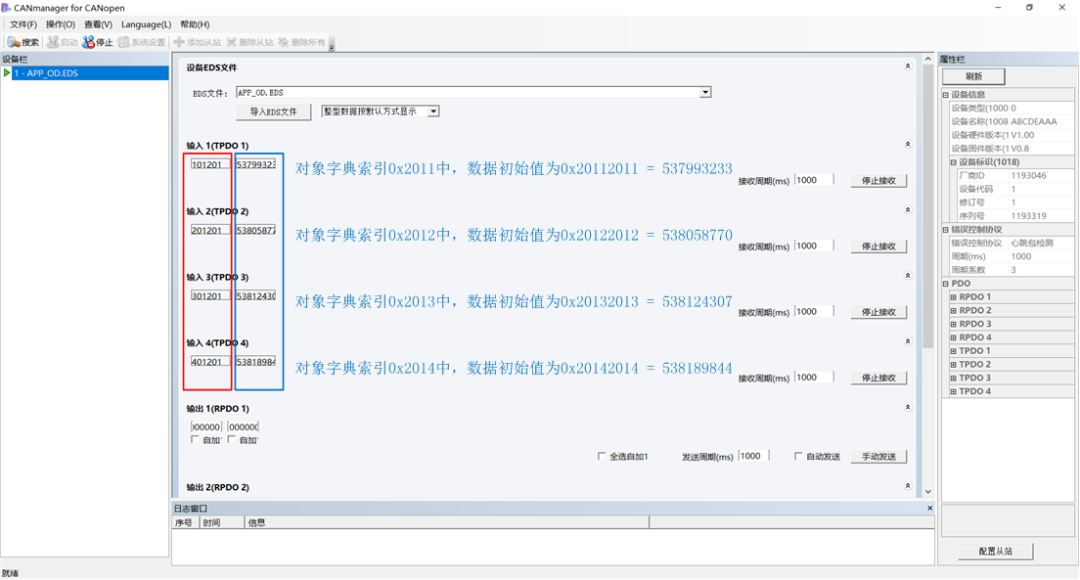
搜索到从机后,点击右下角的关闭按钮后,如下图所示:
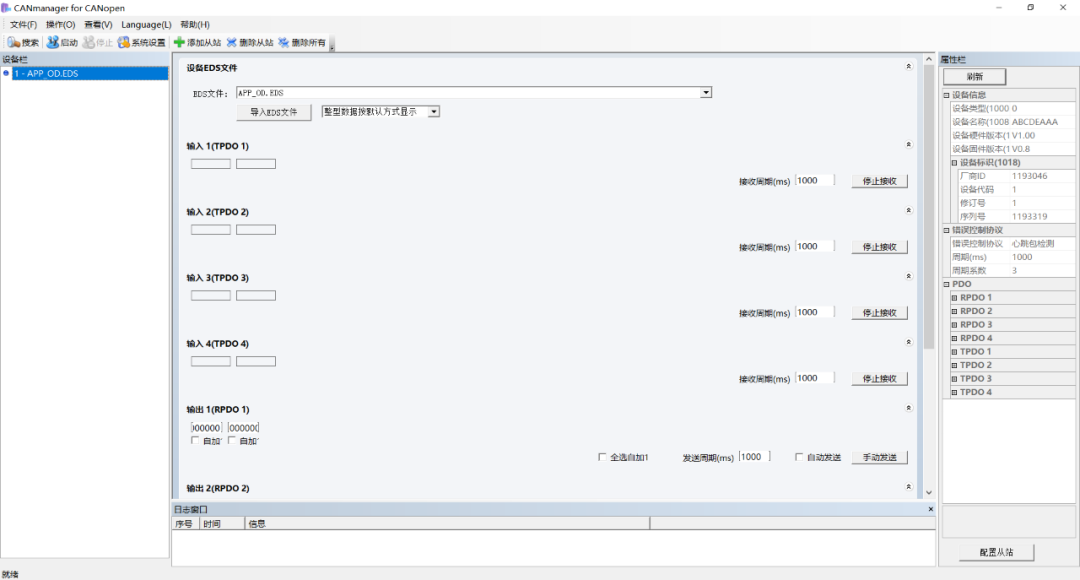
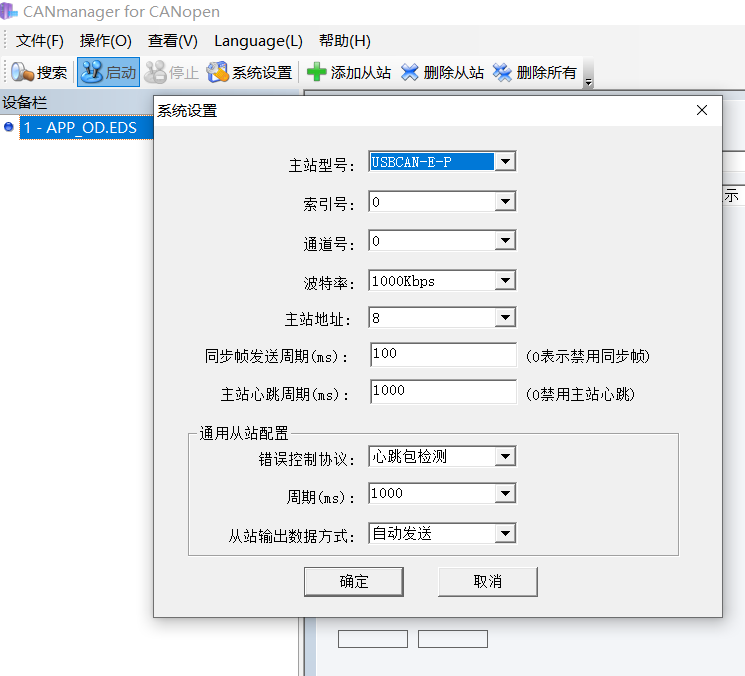
3 . 点击左上角的启动后,设置如图:
启动后,可观察到现象:主机收到从机的TPDO中,红色框中的数据在不断循环。蓝色框中的数据不变,为字典中的初始值。与程序流程图逻辑一致。
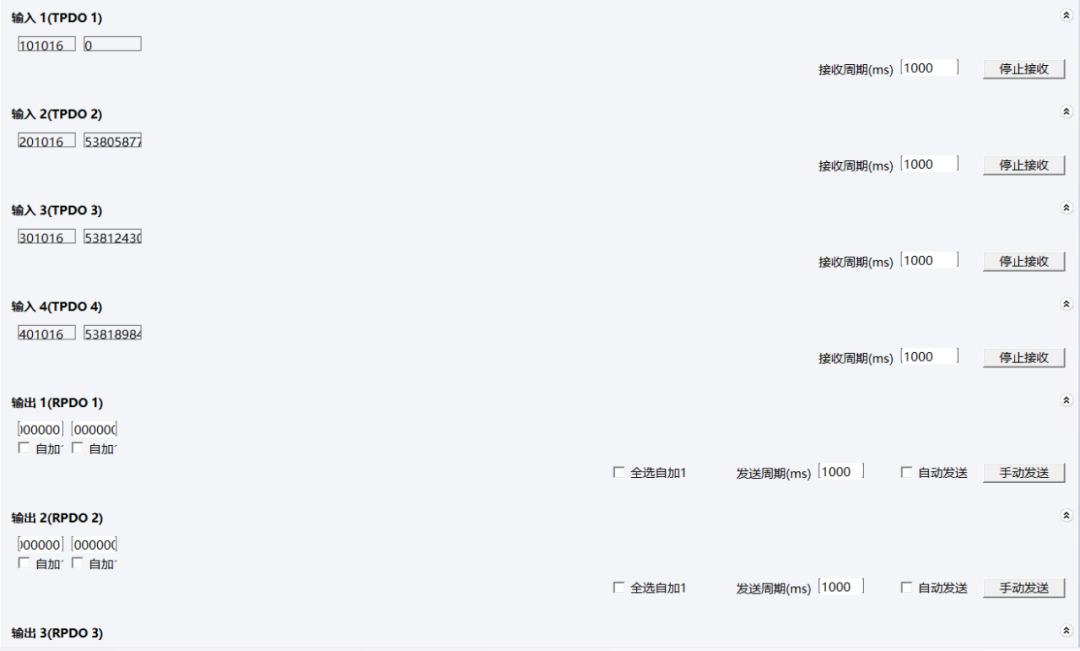
点击RPDO1的手动发送后。TPDO1的后4字节数据与RPDO1的后4字节数据一致。
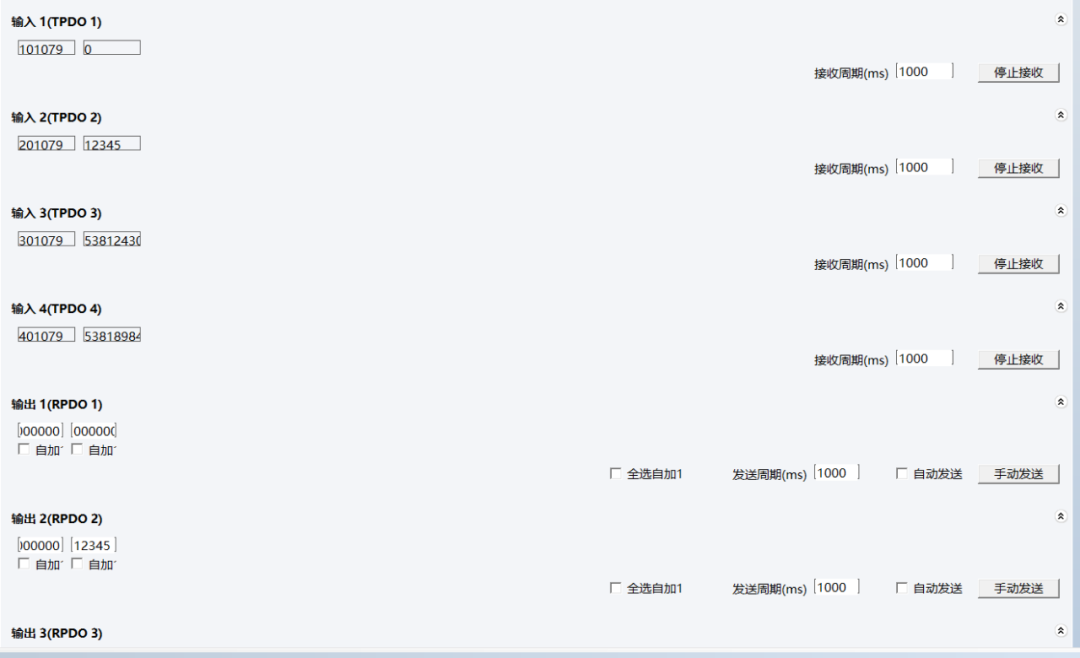
修改RPDO2后4字节数据后,点击RPDO2的手动发送后。TPDO2的后4字节数据与RPDO2的后4字节数据一致。
4 . 实验完成后,RT-Thread控制台输出如下信息:
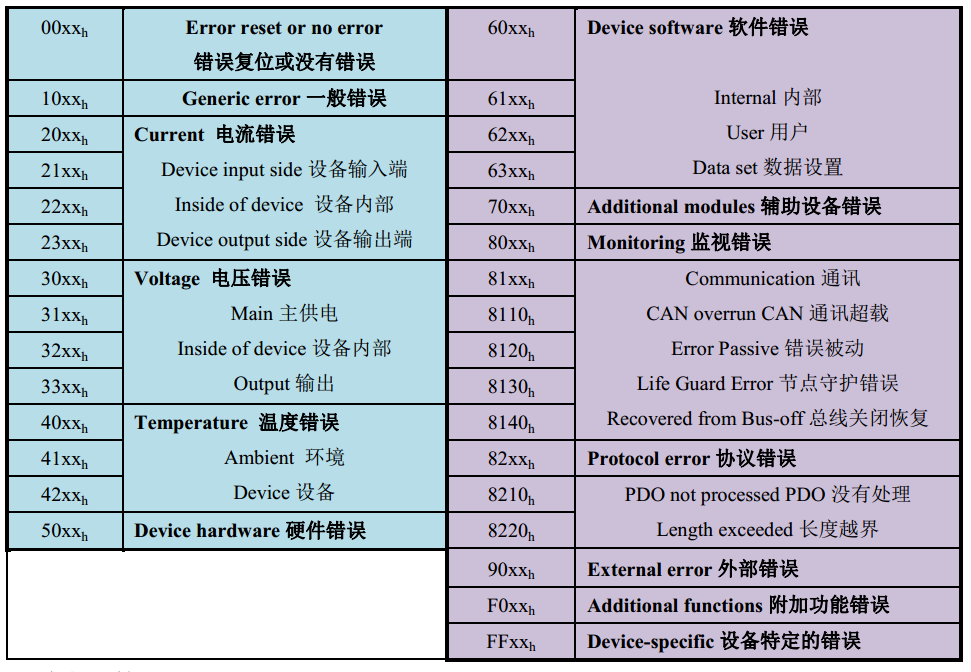
如果主机和从机几乎同时往CAN总线发送数据,就会有 CAN通讯超载 的紧急报文。
received EMCY message. Node: 08 ErrorCode: 8110 ErrorRegister: 11
CANopen紧急报文错误代码说明如下:
1 . CanFestival 软件包修改(版本:v1.0.0)
该软件包有3处需要修改:
软件包第1处修改
修改原因:can过滤器控制块配置不正确。
a . 宏RT_CAN_FILTER_ITEM_INIT,会将过滤表号设置为-1。如果过滤表号为-1,则表示:不指定过滤表号,该过滤器控制块不会被初始化。这会导致回调函数无效。所以需要修改过滤表号:将过滤表号修改为 0。
b . 适配rt-thread的驱动框架。将过滤表模式修改为0。
具体修改如下:(修改前的代码 + 修改后的代码)
将 packages\CanFestival-v1.0.0\src\can_rtthread.c 进行更改。can_rtthread.c的部分内容如下:
修改前:
struct rt_can_filter_item filter1item[1] =
{
RT_CAN_FILTER_ITEM_INIT(0x180, 0, 0, 1, 0, can1ind, &can_data.event)
};
修改后:
struct rt_can_filter_item filter1item[1] =
{
{
.id = 0x180,
.ide = 0,
.rtr = 0,
.mode = 0,/*过滤表模式*/
.mask = 0,
.hdr = 0, /*过滤表号*/
.ind = can1ind,
.args = &can_data.event
}
};
软件包第2处修改
修改原因:部分符号定义冲突。在ES32底层库中,TRUE 和 FALSE会被定义为枚举。在软件包中,TRUE 和 FALSE会被定义为宏。
具体修改如下:
在 packages\CanFestival-v1.0.0\inc\def.h 的#define __def_h__的下方加入头文件:
#include "type.h"
软件包第3处修改
修改原因:删除非必要的文件。
具体修改如下:
packages\CanFestival-v1.0.0\src\timer_rtthread.c
#include 申请了解CANopen

——————End——————