



多相机图像拼接,可以将多相机分为多个双目相机来拼接,这里记录一下双目相机标定的一些原理。
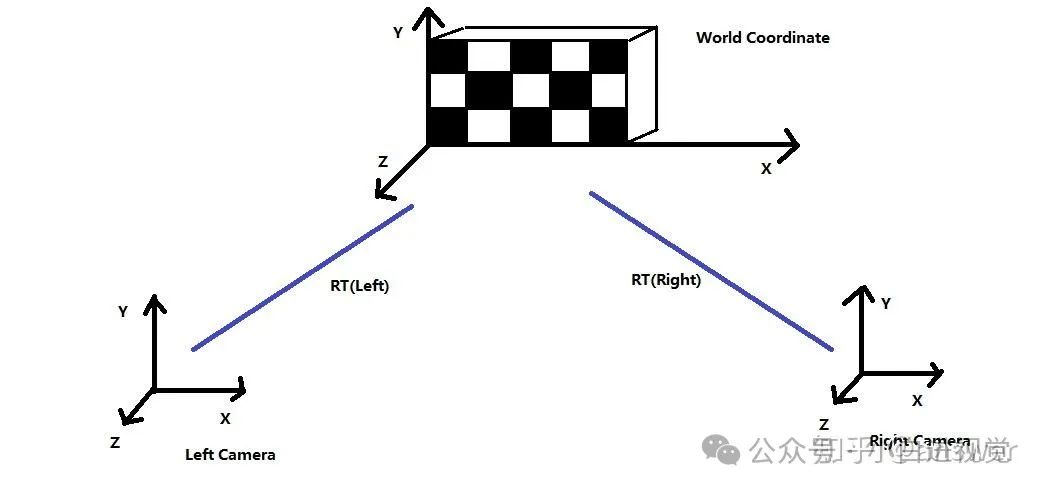
如图为双目相机与标定板之间的关系。
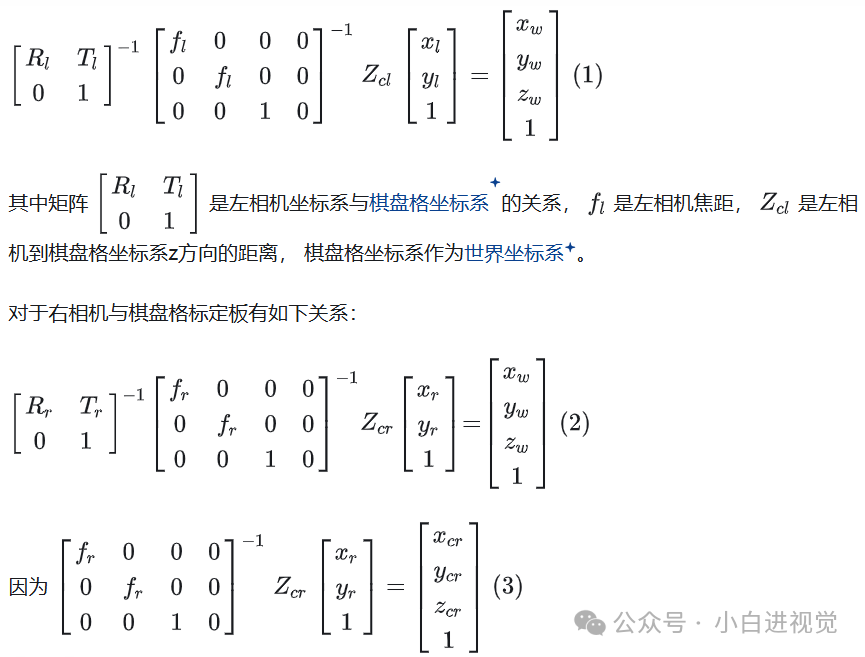
对于左相机与棋盘格标定板有如下关系:
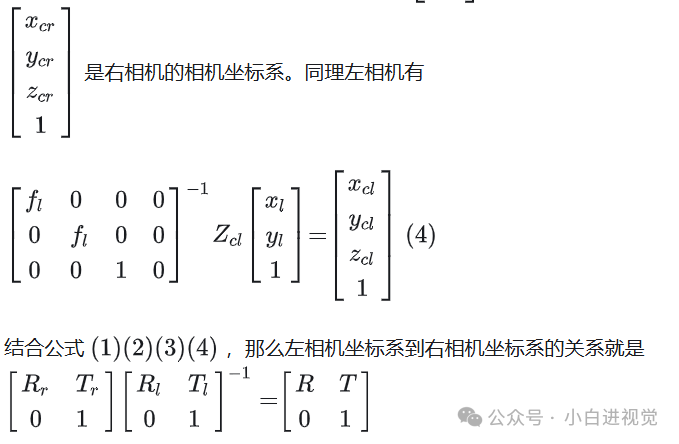
该变换矩阵是一个固定值,是左右两相机的变换关系。
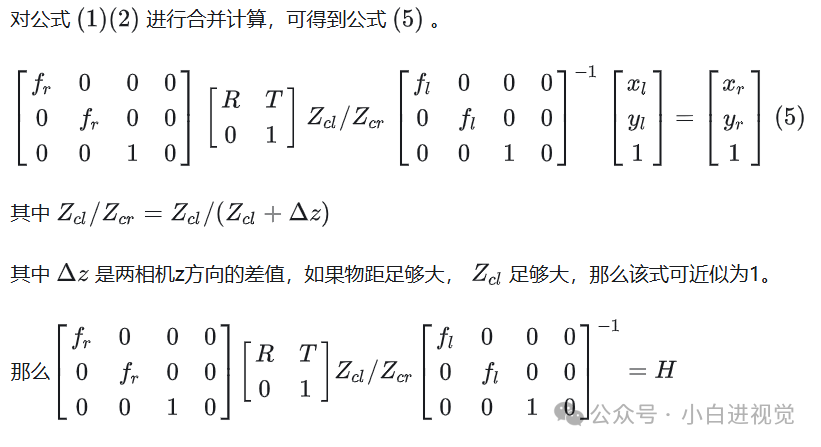
H 是两个相机拍摄图像的单应性矩阵,可用于两图像拼接。
因此,可以得出这样一个结论,影响两幅图像进行配准的变量只有图像中每个像素所对应实际物体到两相机的距离,例如,在一个姿态拍两幅图像计算出H,换一个姿态进行配准,此时两幅图像的H就变化了,实际上影响H变化的是距离,如果配准两幅远景图像,那么这个距离无穷大,即使不同姿态再拍摄两幅图像,那么H几乎没有变化,因此可以使用同一个H进行配准。

