

最大功率点追踪(MPPT)算法是光伏(PV)系统中至关重要的技术,它可以最大化太阳能电池阵列的功率输出。MPPT算法通过实时调整太阳能电池阵列的负载,使其工作在最大功率点(MPP)附近。
MPP是太阳能电池阵列在特定条件下(如辐照度和温度)可以输出的最大功率点。由于太阳能电池阵列的输出特性是非线性的,因此MPP会随着环境条件的变化而变化。MPPT算法通过持续监测电池阵列的输出电压和电流,并调整负载,以确保电池阵列始终工作在MPP附近。
太阳能板也叫光伏电池。是通过光电效应,把光能转换为电能的设备。
先介绍太阳能板的特性。太阳能的额定参数是在地面光伏组件标准测试条件(STC)条件下测量得到的。
STC有三个条件:第一、光线通过大气的实际距离为大气垂直厚度的1.5倍。第二、指标准测试太阳电池的光线的辐照度为1000W/m2。第三、在25ºC的温度下工作。
STC条件会影响光伏电池的开路电压和短路电流。有补偿公式。以下是用Matlab或者Octave绘制光伏电池特性曲线的代码。其中额定值可以通过规格书查找得到,这里影响曲线的可以修改的参数有:
1、到达太阳能板表面的太阳辐射为Sref;
2、太阳能板工作温度为25摄氏度。开路电压Uoc,短路电流Isc,最大功率时电压Um,最大功率时电流Im。a、b、c都是经验值,经过补偿后就可得到修正后的开路电压Uoc_comp和短路电流Isc_comp。
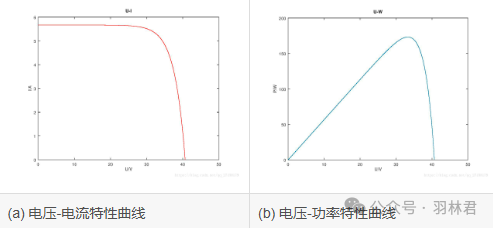
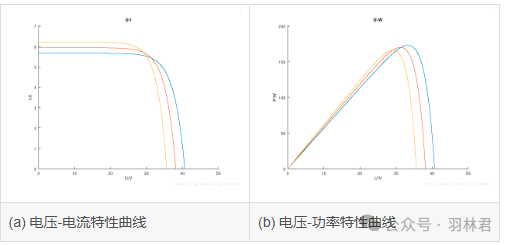
曲线上,每一个点都是光伏电池的工作点。即,光伏电池在正常工作时,假如不是外部因素的改变,得到光伏电池的工作电压,即可在曲线中获得光伏电池的电流、功率。
从电压-功率特性曲线可看出,在当前的环境条件下,太阳能板的最大输出功率为曲线的峰值。这是太阳能板达到最大的能量转换效率。由于能量守恒,太阳能板获得的光能为其输出的电能加上发热量。因此需要通过控制太阳能板的工作电压或者工作电流,让太阳能板工作在最大功率点。这种算法叫最大功率点跟踪(Maximum Power Point Tracking)
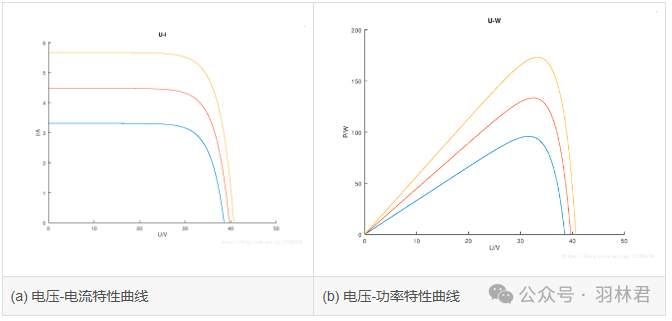
温度升高,光伏电池的开路电压降低,短路电流略有增加。因此,温度升高会导致输出功率下降。
负载阻抗与光伏电池的输出阻抗匹配时,光伏电池输出功率最大。
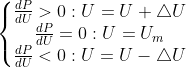
最大功率点追踪(MPPT)算法的目标是寻找光伏电池在特定工作条件下的最大功率点(MPP)。MPP是光伏电池输出功率与输出电压的关系曲线上的一个点,在此点上,光伏电池输出功率最大。
MPPT算法通过不断调整光伏电池的输出电压或电流,使光伏电池工作在MPP附近,从而获得最大功率输出。
MPPT算法主要分为几大类:
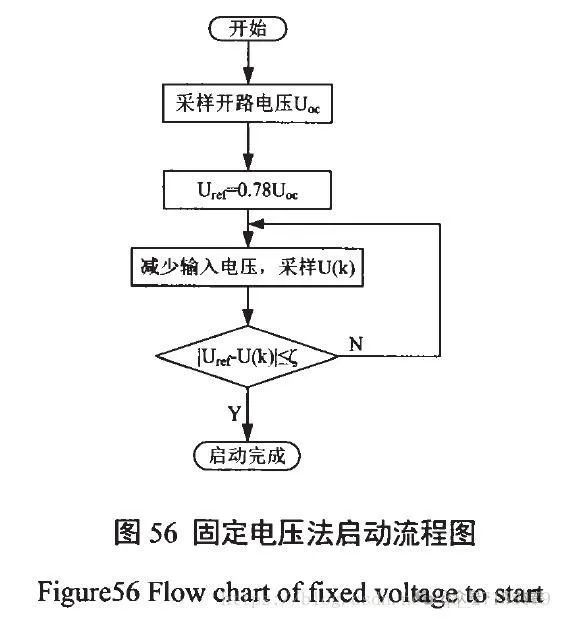
固定电压法
根据经验,单节太阳能板的最大功率点,都在开路电压Uoc的0.78倍附近,所以使用固定输入电压来达到最大功率。
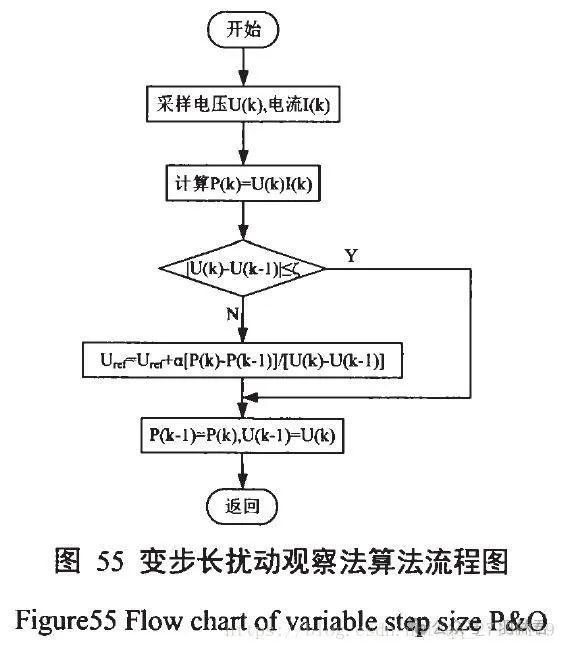
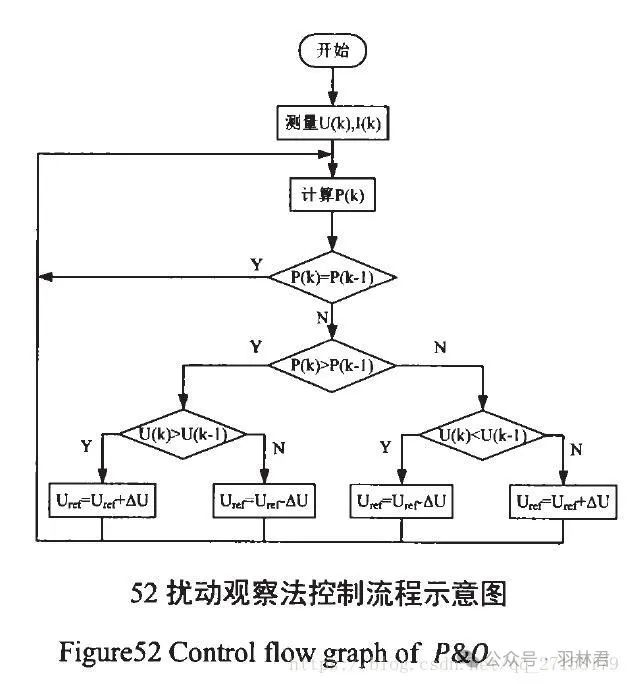
扰动观测法通过不断扰动光伏电池的输出电压或电流,观察输出功率的变化,从而确定MPP所在的方向。
导数法通过计算光伏电池输出功率对输出电压或电流的导数,确定MPP所在的方向。
智能化方法利用模糊逻辑、神经网络等技术,通过学习光伏电池的特性和环境参数,预测MPP所在的方向。
3.2 固定电压法
扰动观测法是一种基于试错的MPPT算法,其原理是通过对光伏电池的输出功率进行扰动,并观测扰动后的功率变化,从而找到最大功率点。扰动观测法主要包括两种方法:增量扰动法和微分扰动法。
增量扰动法是一种最简单的扰动观测法,其原理是:
//*********** Structure Definition ********//typedef struct {float32 Ipv;float32 Vpv;float32 DeltaPmin;float32 MaxVolt;float32 MinVolt;float32 Stepsize;float32 VmppOut;float32 DeltaP;float32 PanelPower;float32 PanelPower_Prev;int16 mppt_enable;int16 mppt_first;} MPPT_PNO_F;//*********** Structure Init Function ****//void MPPT_PNO_F_init(MPPT_PNO_F *v){Ipv=0;Vpv=0;DeltaPmin=(0.00001);MaxVolt=(0.9);MinVolt=0;Stepsize=(0.002);VmppOut=0;DeltaP=0;PanelPower=0;PanelPower_Prev=0;mppt_enable=1;mppt_first=1;}//*********** Function Definition ********//void MPPT_PNO_F_FUNC(MPPT_PNO_F *v){if (v->mppt_enable==1){if (v->mppt_first == 1){VmppOut= v->Vpv - (0.02);mppt_first=0;PanelPower_Prev=v->PanelPower;}else{PanelPower=(v->Vpv*v->Ipv);DeltaP=v->PanelPower-v->PanelPower_Prev;if (v->DeltaP > v->DeltaPmin){v->VmppOut=v->Vpv+v->Stepsize;}else{if (v->DeltaP < -v->DeltaPmin){v->Stepsize=-v->Stepsize;v->VmppOut=v->Vpv+v->Stepsize;}}PanelPower_Prev = v->PanelPower;}VmppOut < v->MinVolt) v->VmppOut = v->MinVolt;VmppOut > v->MaxVolt) v->VmppOut = v->MaxVolt;}}
增量扰动法的优点是简单易实现,但缺点是收敛速度慢,而且容易受到噪声干扰。
微分扰动法是一种改进的扰动观测法,其原理是:
微分扰动法的优点是收敛速度快,而且不容易受到噪声干扰,但缺点是实现复杂度较高。
最大功率点跟踪实质上就是搜索满足条件的工作点,由于数字控制中检测及控制精度的限制,以近似代替,影响了MPPT算法的精确性。一般而言,由步长决定,当最小步长一定时,MPPT算法的精度就由对的近似程度决定。扰动观测法用两点功率差近似代替微分,即从出发,推演出以功率增量为搜索判据的MPPT算法。
实际上,为了进一步提高MPPT算法对最大功率点的跟踪精度,可以考虑用功率全微分近似代替的MPPT算法,即从出发,推演出以电导和电导变化率之间的关系为搜索判据的MPPT算法,即电导增量法:
导数法是一种基于导数的MPPT算法:


电导数法的优点是收敛速度快,而且精度高,但缺点是实现复杂度较高,而且容易受到噪声干扰。
斜率法是一种最简单的导数法,其原理是:
斜率法的优点是简单易实现,但缺点是收敛速度慢,而且容易受到噪声干扰。
曲线拟合法是一种改进的导数法,其原理是:
曲线拟合法的优点是收敛速度快,而且精度高,但缺点是实现复杂度较高,而且容易受到噪声干扰。
跟踪效率是衡量MPPT算法跟踪最大功率点能力的指标。它表示算法在给定时间内跟踪最大功率点的准确程度。跟踪效率通常使用以下公式计算:
其中:
跟踪效率越高,表明算法跟踪最大功率点的能力越强。
稳定性是衡量MPPT算法保持最大功率点稳定的能力。当光伏阵列的辐照度或温度发生变化时,算法应该能够快速稳定地调整输出功率,以确保系统稳定运行。稳定性通常使用以下指标来衡量:
响应速度是衡量MPPT算法对光伏阵列辐照度或温度变化的响应速度。当光伏阵列的辐照度或温度发生变化时,算法应该能够快速调整输出功率,以最大限度地利用光伏阵列的输出功率。响应速度通常使用以下指标来衡量:
下表总结了MPPT算法性能评估的指标及其含义:
MPPT控制器的性能通常通过以下指标来评估:
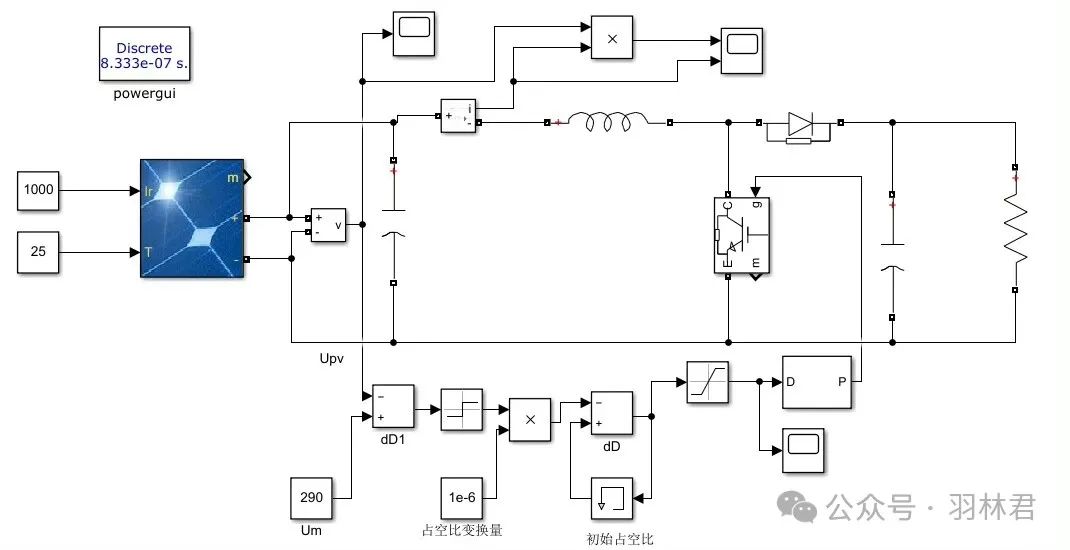
MPPT控制器是光伏系统的重要组成部分,负责从光伏电池中提取最大功率。在光伏系统集成中,MPPT控制器通常与以下组件连接:
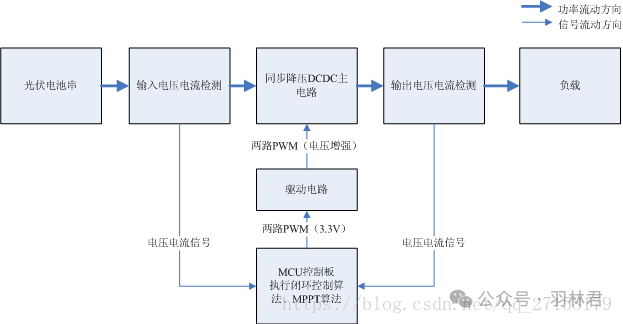
光伏电池通过降压DCDC主电路为负载供电。DCDC的作用是可以精确控制输出电压。直流系统的负载一般都是阻性负载。有时候可能是电阻串电池的形式。那么负载电流是和负载电压密切相关的,即电压越大、电流越大。而开关电源DCDC的转换效率较高,一般大于70%。因此可通过控制输出电压,改变输出功率,也同时改变了输入功率,即改变了光伏电池的输出功率。
MPPT控制器与光伏电池阵列的连接方式有串联和并联两种。
MPPT控制器与负载的连接方式有直接连接和通过逆变器连接两种。
MPPT控制器与逆变器的连接方式有直流连接和交流连接两种。
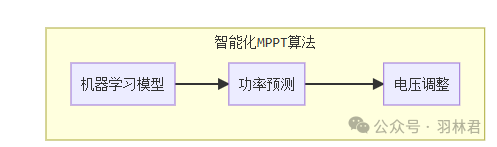
6.1 智能化MPPT算法
随着人工智能技术的发展,智能化MPPT算法应运而生。该算法利用机器学习、神经网络等技术,能够根据光伏系统历史数据和实时运行情况,动态调整MPPT参数,实现更高效的功率追踪。
6.2 混合MPPT算法
混合MPPT算法将多种传统MPPT算法结合起来,取长补短。例如,可以将扰动观测法与导数法结合,在快速跟踪和稳定性之间取得平衡。
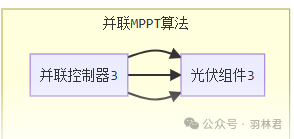
6.3 并联MPPT算法
并联MPPT算法适用于多路光伏组件并联连接的系统。该算法将每路组件的MPPT控制器并联起来,实现独立的功率追踪。这样可以减少系统损耗,提高整体发电效率。
表格示例:
流程图示例:
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读
【1】jetson nano开发使用的基础详细分享
【2】Linux开发coredump文件分析实战分享
【3】CPU中的程序是怎么运行起来的 必读
【4】cartographer环境建立以及建图测试
【5】设计模式之简单工厂模式、工厂模式、抽象工厂模式的对比
 ,对U求导,可得到:
,对U求导,可得到: