


摘要:汽车自动驾驶技术是智能交通的关键组成部分,其中人机切换驾驶技术对于实现安全、高效的驾驶至关重要。通过公开文献和技术报告,分析了汽车自动驾驶中人机切换驾驶技术的发展背景、技术现状,明确了人机协同驾驶在提升驾驶安全性、改善用户体验及推动技术创新方面的重要作用,指出了实现自动驾驶过程中面临的主要挑战,并从人机交互、驾驶模式切换以及座舱智能化等多个视角,探讨了人机切换驾驶技术的未来发展方向。
0前言
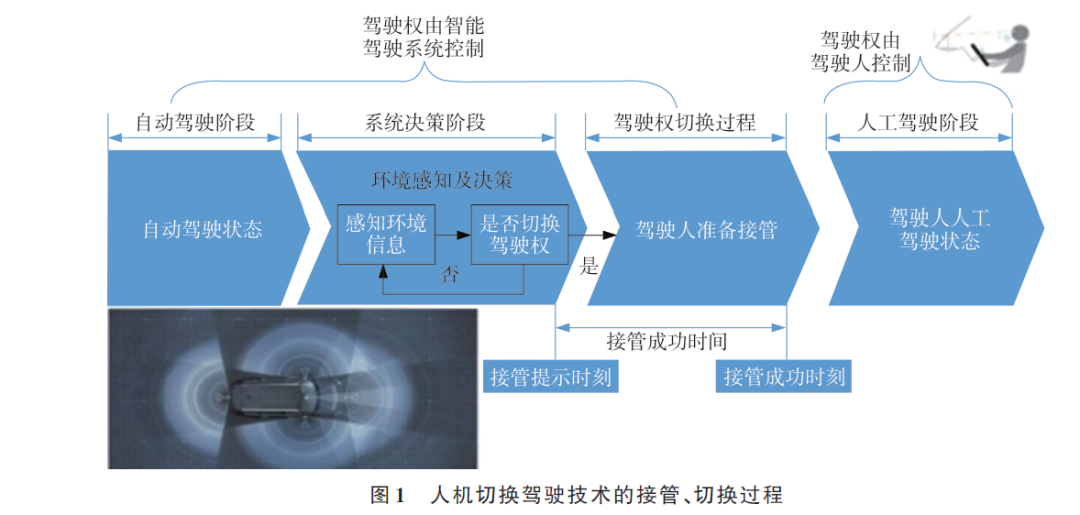
随着智能交通的发展与逐步推进,汽车自动驾驶技术正从最初的辅助驾驶向全自动驾驶演进,而在未来较长的一段时间内,人机共驾的状态将持续存在。在此背景下,保障自动驾驶系统和驾驶员间权限的顺利切换以及人机交互的合理性和流畅度,对于保障车辆的运行安全性和提升驾乘舒适性至关重要[1-3]。人机切换驾驶技术关注的是如何在人与机器之间实现控制权的平滑、安全转移,人机切换驾驶技术所涉及的接管、切换过程如图 1 所示。
1发展现状
1. 1 自动驾驶技术现状
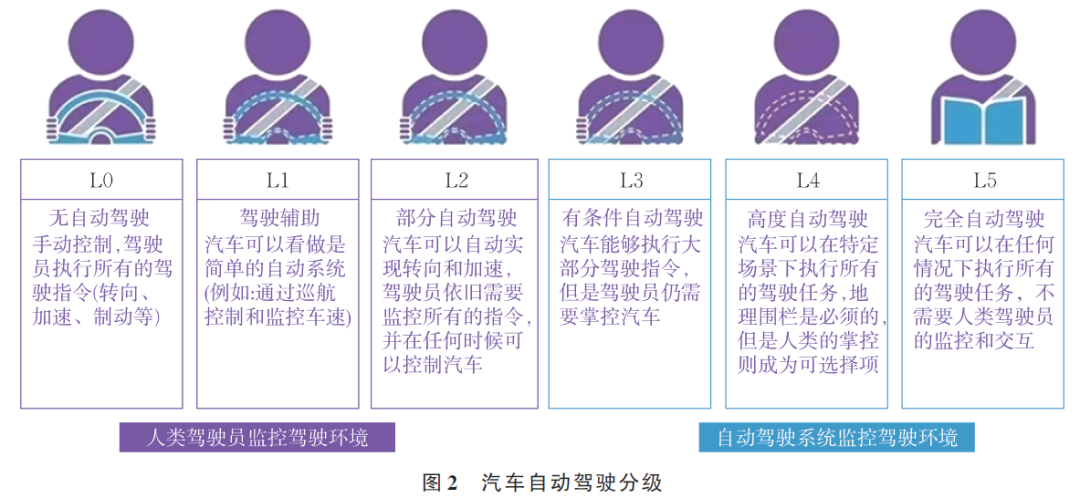
汽车自动驾驶技术根据自动化程度不同一般可 分为 L0~L5 级 ,具 体分级类型如图 2 所 示 。 其中 ,L3 级 及以上的自动驾驶系统涉及人机切换驾驶技术[4]。具体来说,L3 级别的自动驾驶系统可以在特定条件下实现对车辆的完全控制,但遇到紧急情 况或者突发情况时仍需驾驶员接管驾驶权限 。相比之下,L4、L5 级别的自动驾驶系统则能在更广泛场景下实现无人驾驶,甚至全程不需要驾驶员的干预。目前 ,市面上广泛使用的自动驾驶是 L1 和L2 级别的辅助驾驶,这些辅助驾驶已相对成熟,成为很多车型的标配。随着技术进步和政策的放开,部分国家已经开始准许 L3 级别及以上自动驾驶车辆开展上路试点。
得益于国家政策的支持 ,我 国已开始 L3级别及 以上自动驾驶的试点示范运营 ,预 计于 2025 年将实现商业化落地 。 2023 年 ,工业和信息化部与国 家标准化管理委员会共同发布了修订版的《国家车联网产业标准体系建设指南(智能网联汽车)(2023 版)》。 该 指南旨在进一步规范车联网产业的标准建设 ,对 智能汽车 、网 联汽车的通用配置 、核心技术以及关键产品应用等提供指导 ,从而构筑全面覆盖智能网联汽车产品、技术、试验标准等各方面的保障体系 。 尽 管如此 ,要 达到真正的全自动驾驶状态(即 L5 级别),目前仍面临许多技术性和非技术性障碍 。 因此 ,人 机协同控制的驾驶模式仍将作为重要的过渡阶段驾驶模式继续存在,这既为技术创新提供了广阔的空间,也带来了一系列的技术挑战。
1. 2 人机协同控制技术现状
在智能汽车自动驾驶领域,业内技术人员普遍认为,在实现完全无人驾驶之前,未来一定时间内将处于驾驶员与自动驾驶系统或辅助驾驶系统的协同控制阶段。鉴于相关政策尚未完全落地,以及可靠性与安全性仍需验证,自动驾驶汽车人机协同控制的定义及其协同控制的形式还没有达成统一共识。目前,自动驾驶汽车的人机协同控制主要分为人机切换型和人机共驾型两种方式。理想的自动驾驶人机协同驾驶方案是让车辆自动驾驶系统和驾驶员共同作为驾驶参与主体,通过两者间的互补合作,实现更优的控制效果。自动驾驶系统能够利用其精准的数字控制能力和感知能力等优势,在驾驶员感到疲劳、失去知觉、走神或突发疾病无法操作时提供及时有效的处理,减少事故发生的可能性。驾驶员可以凭借自身的思考和应变能力,弥补自动驾驶系统在面对突发场景和未知状况处理能力的不足,提升对突发状况的应对水平。然而,有研究指出,当车辆处于自动驾驶模式时,人类驾驶员更容易出现注意力分散的情况,这可能会影响他们 在必要时接管车辆控制权的准确性和及时性 。相比人机共驾型驾驶方式,人机切换型驾驶方式因其技术稳定性高、安全性好被视为更有前景的发展方向。人机切换型驾驶方式的优点在于自然人和机器之间没有直接的交互和耦合,车辆的控制过程更加清晰明确。同时,这种驾驶方式的变化相对较小,使得人类更容易适应,因此这也是目前最常用的人机协同驾驶方式。切换型人机协同控制的缺点主要在于驾驶权从自动驾驶系统切换到人类驾驶员的过程中,难以确保后者处于良好的工作状态。长时间不参与驾驶活动可能导致驾驶员的注意力分散,当驾驶员接手控制权时,需要重新集中注意力并适应周围的驾驶环境。这一过程充满了不确定性,限制了控制权的自由切换。因此,该模式的主要设计难点在于如何评估驾驶员和自动驾驶系统哪一方的表现更优,并基于驾驶员的状态等因素合理确定控制权切换的最佳时机,以实现控制权的平稳过渡,这也是目前自动驾驶技术重点关注的方向。
1. 3 人机交互技术现状
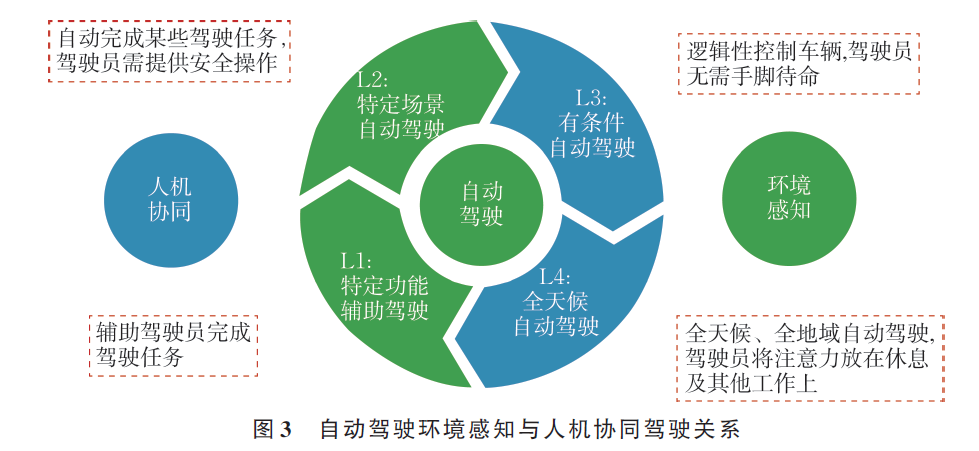
自动驾驶系统的构成主要包括自动驾驶控制单元、驾驶人监控模块及环境感知模块,人机交互是自动驾驶人机切换控制的关键。自动驾驶系统通过解析驾驶员的行为数据,并结合车辆状态和周边环境感知信息,来确定驾驶权分配的权重或适时进行切换。此外,人机交互作为机器与驾驶员间的桥梁,促进了双方的有效沟通,增强了人机共驾系统的交互性。未来,随着汽车集成更多高级的辅助驾驶系统,其功能也将变得更加复杂。人机交互模块作为自动驾驶汽车安全可靠行驶的关键组件,提供了机器与人类驾驶员交换驾驶信息和操作反馈的 渠道 ,使 自动驾驶执行过程变得更加透明和直观。在人机切换型驾驶方式中,人机交互技术发挥着不可或缺的作用。随着技术的不断进步,人机交互技术正从传统的二维交互向三维交互转变,旨在提供更加自然、更加直观的交互体验,如语音识别、手势识别、头部跟踪和视觉跟踪等多模态交互技术的应用,显著提升了驾驶员与自动驾驶系统之间沟通的效率和准确性。人机协同驾驶控制是指自动驾驶系统和驾驶员同步参与车辆控制,共同协作完成驾驶任务的过程,其主要由环境感知、自动驾驶和人机协同三者构成,如图 3 所示。这种协同控制模式不仅实现了驾驶员与自动驾驶系统的共同车辆运动控制,完成了驾驶任务,而且有效规避了高级别自动驾驶车辆面临的技术难点,推动了智能网联汽车的发展。感知定位技术作为自动驾驶中的重要环节,为后续的车辆控制和决策奠定了基础。人机切换型驾驶方式不仅要求系统能够精准感知周围交通环境,还需要确保驾驶员至少维持对交通环境的基本感知。这样不仅能提高系统的安全性,还能增强系统的可解释性和可靠性。
2发展方向
2. 1 强化学习训练
在自动驾驶领域,深度强化学习展现出了巨大潜力,特别是在人机切换型驾驶技术的应用方面。该技术能够训练自动驾驶系统在复杂的交通环境中作出更优的决策,并优化人机切换策略。人机切换型驾驶技术研究的首要任务是自动驾驶系统的接管机制智能化。深度强化学习被应用于自动驾驶系统智能体,以实现更高效和更安全的驾驶权交互 。 通 过建立综合考虑驾驶员状态 、自 动驾驶策略、驾驶权切换逻辑的强化学习框架,可以在保障安全性的前提下,适应复杂多变的实时路况,提高人机切换过程的舒适性和效率。例如,可以通过引入驾驶干预机制和基于驾驶员指导的经验回放机制,在模型训练的早期阶段或当模型陷入局部最优解困境时实施干预,以此提升驾驶权切换模型的学习效率和泛化能力。
2. 2 个性化交互
驾驶控制权的切换过程较为复杂,涉及到车辆状态传感器、车外环境传感器和驾驶员状态传感器的综合评估,以及车辆硬件与软件的协同。在驾驶过程中,任何环节的疏忽或者偏差都有可能导致判断失误,从而引发潜在风险。因此,提高切换过程的平稳性,增强驾乘的主观舒适度是未来自动驾驶技术发展的关键。这包括对驾驶员提醒系统的个性化设置,允许用户根据自己的习惯和喜好自由选择或定制提醒方式和频率。未来自动驾驶技术发展将更加侧重于个性化设置,允许用户自由选择适合自己的切换方式。
2. 3 切换逻辑升级
控制权的切换决策是自动驾驶系统的核心功能之一。在系统无法顺利切换至目标驾驶模式时,应选择退避策略,通过制动减速直至停止,让车辆停靠在相对安全的区域。这种制动减速停车的行为虽然与驾驶至目的地的目标相悖,但在无法安全切换驾驶模式时是必要的安全措施。为了实现真正意义上的人机共驾,自动驾驶系统需要根据不同的外界环境、车辆状态和驾驶员状态,为自动驾驶系统和驾驶员的操作分配不同的权重,这在本质上属于人机协同驾驶的范畴。在面对驾驶场景中突然出现的物体时,自动驾驶系统可能需要依赖驾驶员的观察和反应,通过驾驶员对踏板或方向盘的操作,紧急切换到手动驾驶模式。如果在自动驾驶过程中,驾驶员未能注意到这些突然出现的物体,车辆可能会面临危险状态,因此在设计切换逻辑时,对于部分切换和过渡切换方式的界定是人机完全协同共驾技术发展的巨大挑战。
2. 4 智能座舱
智能座舱在自动驾驶中扮演着至关重要的角色,它不仅优化乘车体验,同时也是连接驾驶员与汽车的桥梁,是确保驾驶员可以随时接管车辆的重要对象[5]。随着自动驾驶技术的不断进步,驾驶座舱已不仅是驾驶员的工作区域,更演变为乘车者的休憩和娱乐空间。为了提供更加舒适、方便的驾乘体验,智能座舱已开始采用更加智能化、人性化的交互方式[6]。目前,多数智能座舱操作平台仍依赖于预设的固定规则或对单一行为的简单预测,这种模式在应对复杂变量如面部表情变化、眼睛视角和认知水平变化时存在显著的局限性。随着自动驾驶技术的不断演进,增强座舱的智能性成为必然趋势。智能座舱可以通过实时监测驾驶员的细微变化,并利用这些数据构建出驾驶员的动态模型,同时深入理解驾驶员在不同状态的实际表现和行为模式,通过分析人机交互的历史数据,评估驾驶员对自动驾驶系统的依赖程度和信任水平。无论驾驶员是主动参与驾驶还是选择让自动驾驶系统接管 ,智 能座舱系统都能够根据驾驶员的偏好和习惯,提供个性化的智能人机交互方案[7-9]。例如,在高速公路场景下,如果驾驶员突然停用自动驾驶功能,智能座舱系统不仅要迅速响应,还应能够深入分析当时的驾驶场景,进而判断该操作是否出自驾驶员的主动决策,或是因误操作所致,以提高人机切换驾驶接管的安全性。
3结语
本文主要论述了汽车自动驾驶中人机切换驾驶技术的现状及其发展趋势,论述了人机切换驾驶技术在保障交通安全和提升交通效率方面的重要作用。人机交互技术正不断进步,提供了自然、直观的交互体验,而深度强化学习的应用则展示了其在训练自动驾驶系统作出更优决策方面的巨大潜力。未来的汽车自动驾驶技术发展方向主要集中在个性化交互、切换逻辑再升级和智能座舱的研发等领域,目标是实现更安全、更舒适的人机共驾体验。这些技术的进步不仅推动了汽车智能化的发展,也可确保驾驶员在必要时能够安全、有效地接管车辆控制权。未来的研究将更加关注深度学习、人 机交互和安全驾驶等多个领域 ,力 求实现更智能、更可靠的自动驾驶解决方案。
参考文献
[ 1 ] 张玲玉,王力,张力力,等 . 智能汽车的切换型人 机共驾研究进展与展望 [J]. 重 庆交通大学学报,2022,14(9):130-139.
[ 2 ] 吴 超仲 . 人 机共驾智能汽车的控制权切换与安 全性综述 [J]. 交 通运输工程学报 ,2018,18(6):131-141.
[ 3 ] 徐 筱秦 ,冯 忠祥 ,李 靖宇 . 驾 驶员接管自动驾驶车辆研究进展[J]. 交通信息与安全,2019,37(5):1-8.
[ 4 ] 谭浩,孙家豪,关岱松,等 . 智能汽车人机交互发 展趋势研究 [J]. 包 装工程 , 2019, 40(20):32-42.
[ 5 ] 李 克强 ,戴 一凡 ,李 升波 ,等 . 智 能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报,2017,8(1):1-14.
[ 6 ] 孟 健 ,王 馨 ,李 函遥 . 自 动驾驶与智能座舱的关 系及技术难点 [J]. 时 代汽车 , 2023(11):132-134.
[ 7 ] 箫洪 . 自动驾驶对智能座舱的挑战人机交互方式的重新定义[J]. 数字经济,2021(11):60-62.
[ 8 ] 李 仁杰 . 人 机共驾型智能汽车的共享控制方法研究[D]. 北京:清华大学,2018.
[ 9 ] 吴蔚 . 智能座舱“领跑”汽车智能化[N]. 经济参考报,2022-07-29(5).
