


01
内容概览
舒适性与可穿戴性:现有手势识别系统通常笨重,影响用户舒适度,难以实现日常无缝集成。
环境干扰:非接触设备(如摄像头)易受环境干扰,且设置复杂。
精确度不足:现有系统在捕捉精细运动行为(如手写字母识别)方面存在不足。
智能混合织物腕带系统(IHFWs):提出了一种新型可穿戴设备,结合了智能织物技术和符合人体工程学的设计,提升了舒适性和可穿戴性。
热封装工艺:采用自加热热塑性聚氨酯(TPU)封装工艺,增强了设备的耐用性和透气性,同时保持轻便和可伸缩性。
高精度手写识别:识别算法实现了96.63%的字母手写识别准确率,显著提升了虚拟手写识别的精确度。
虚拟与增强现实(VR/AR):在虚拟环境中实现高精度手写识别和方向控制。
健康监测:通过手势识别进行健康数据的实时监测。
工业控制与自动化:提升工业环境中的人机交互效率和精确度。
机器人技术:增强机器人与人类之间的自然交互。
文章提出了一种创新的智能混合织物腕带系统(IHFWs),通过结合智能织物技术、热封装工艺和高精度识别算法,解决了现有手势识别系统在舒适性、可穿戴性和精确度方面的不足。该系统在虚拟现实、健康监测、工业自动化和机器人技术等多个领域具有广泛的应用前景,为人机交互提供了一种更加自然、直观和愉悦的方式。
 文章名称:An intelligent hybrid-fabric wristband system enabled by thermal encapsulation for ergonomic human-machine interaction
文章名称:An intelligent hybrid-fabric wristband system enabled by thermal encapsulation for ergonomic human-machine interaction
期 刊:Nature Communications
文章DOI:https://doi.org/10.1038/s41467-024-55649-1
通讯作者:清华大学任天令教授、杨轶副教授和刘厚方副教授
02
图文简介
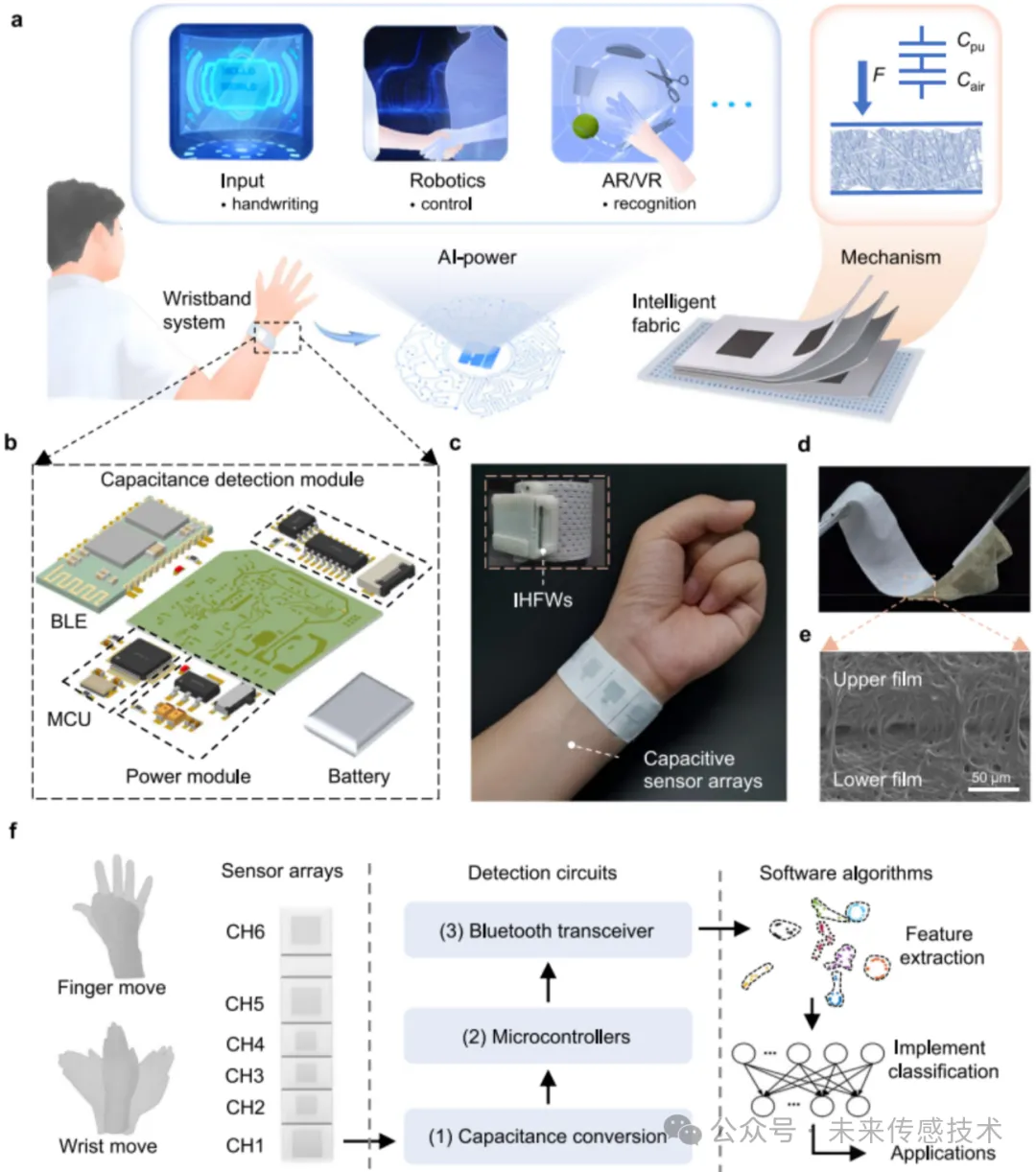
图1 智能混合织物腕带系统。a 智能混合织物腕带系统的示意图。b 电容检测模块的示意图,包括控制电路和电池。控制电路由电源模块、蓝牙(BLE)和微控制器单元(MCU)组成。c 智能混合织物腕带系统(IHFWs)佩戴在手腕上的照片。d 由全纺膜组成的六通道电容压力传感器的照片。e 通过热封装将两种薄膜包装在一起的交联界面形态。f 腕带人机交互界面系统的数据流图。
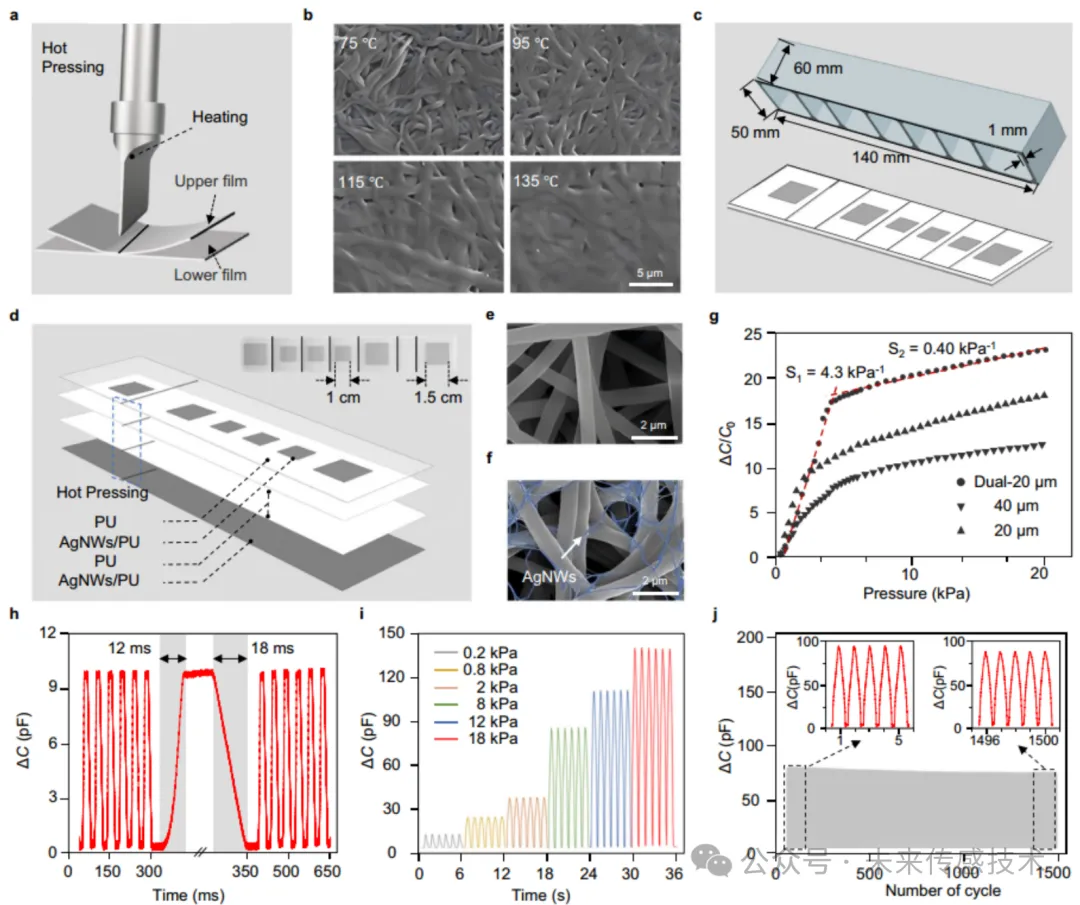
图2 电容压力传感器的热封装过程及其表征。a 热封装过程的示意图。b 在不同热封装温度下的电纺膜扫描电子显微镜(SEM)图像(压力:100 kPa;模具尺寸:1 mm × 10 mm)。c 不锈钢模具及封装过程的示意图。d 由热塑性聚氨酯(TPU)薄膜和银纳米线/热塑性聚氨酯(AgNWs/TPU)薄膜组成的传感器阵列的示意图。e–f TPU薄膜和AgNWs/TPU薄膜的SEM图像。g 三种不同介电层类型的灵敏度曲线。h 设备响应时间的信号图。i 设备在不同压力下的响应信号。j 机械耐久性测试。
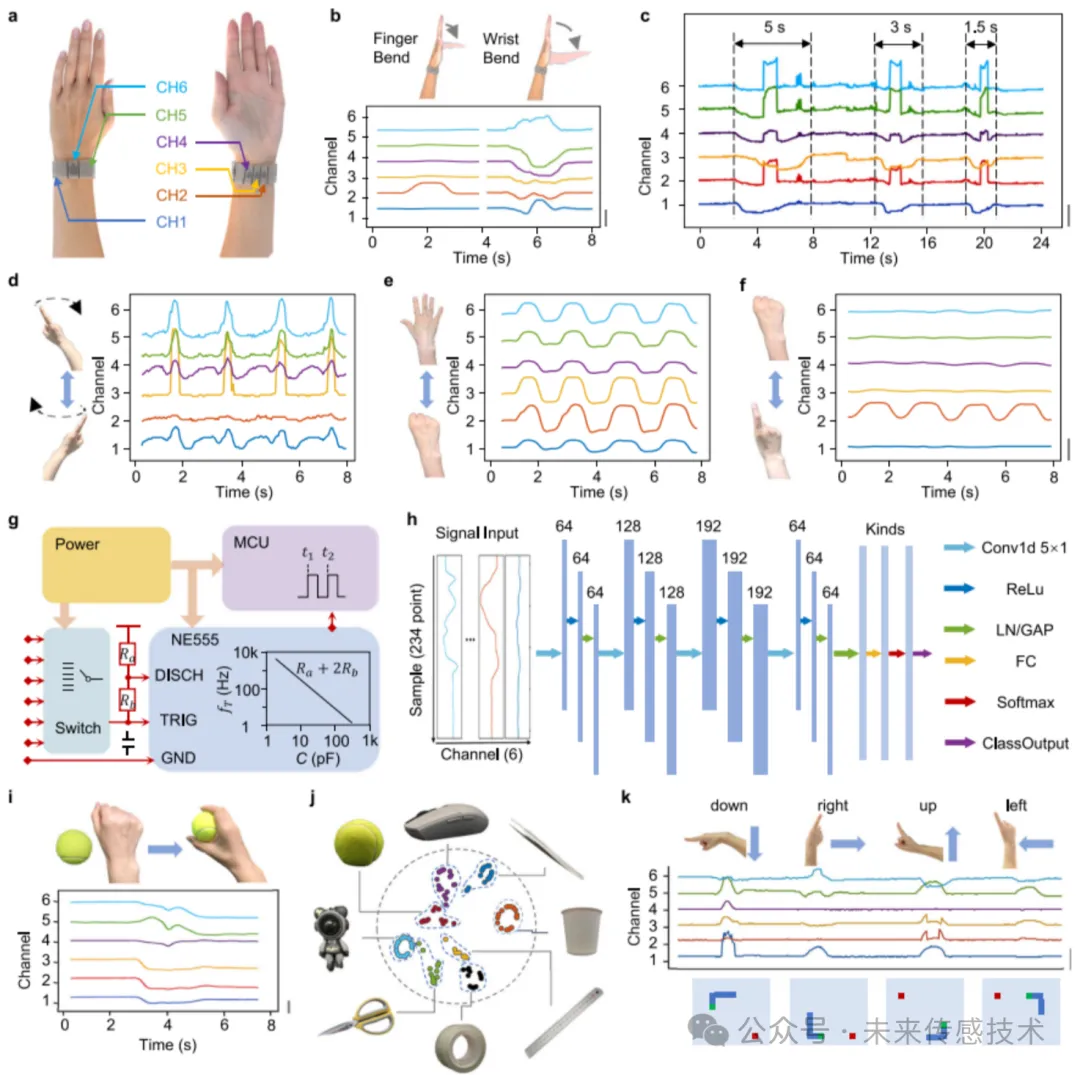
图3 检测原理及日常应用。a 传感器通道布置示意图。b 手指弯曲和手腕弯曲动作产生的传感器信号。比例尺,12 pF。c 不同速度下相同动作的信号图。比例尺,20 pF。d–f 通过重复动作获得的信号波形。分别为重复的食指画圈、握拳伸掌、食指弯曲。比例尺,15 pF。g 电容阵列硬件检测示意图,包括电源、微控制器单元(MCU)、模拟开关和NE555芯片。h 深度学习神经网络的结构图。i 手握球时的信号图。比例尺,15 pF。j CNN“softmax”层的物体识别信号聚类结果。k 系统控制贪吃蛇游戏中蛇的上下左右移动。比例尺,20 pF。
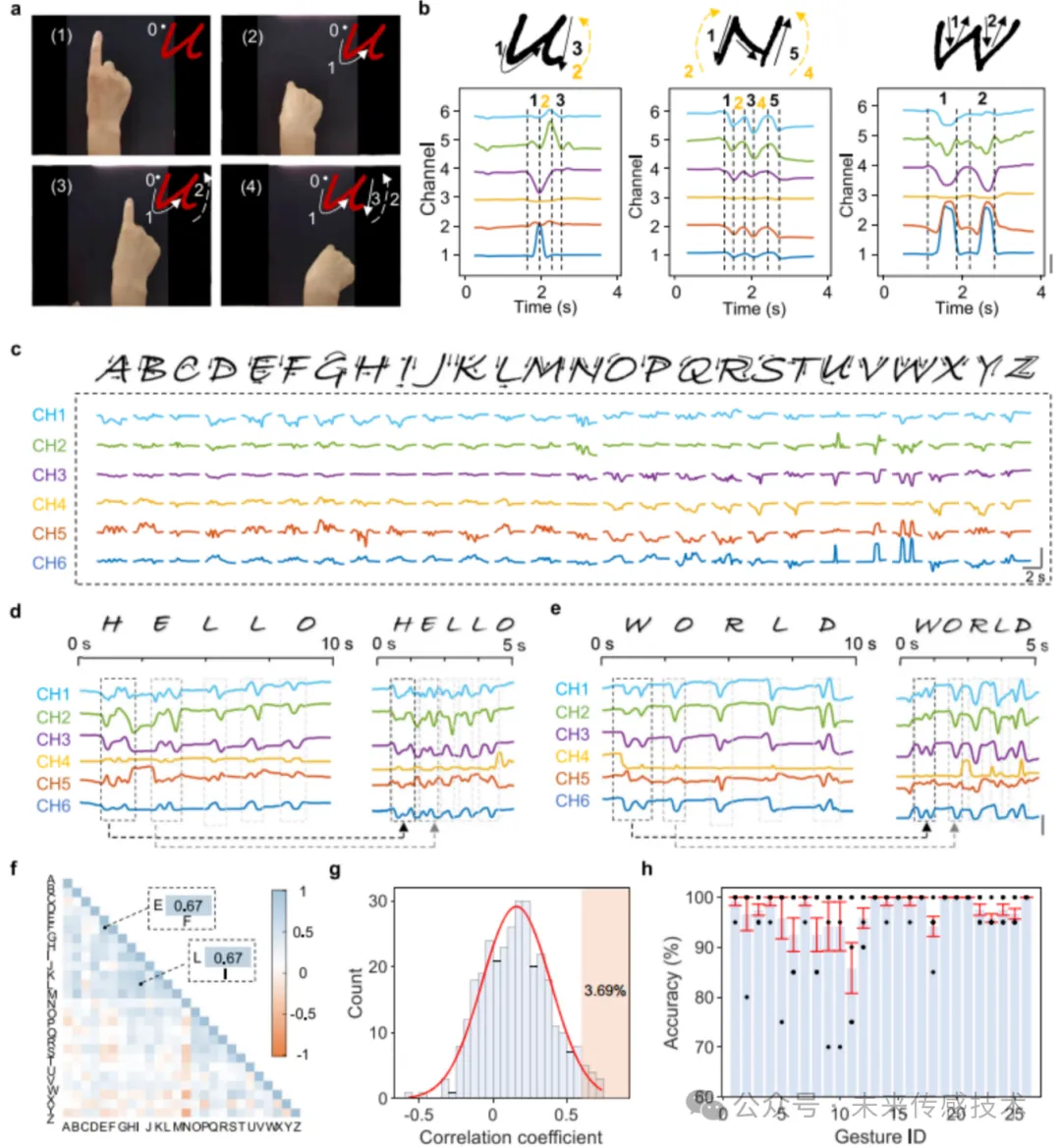
图4 虚拟手写识别。a 手写字母的照片,展示字母‘U’。b 手写字母‘U’,‘N’和‘W’的信号图。黑色部分标记为实际笔画,黄色部分标记为虚拟笔画。比例尺,15 pF。c 来自26个手写字母的信号图输出。比例尺,25 pF。d,e 图(d)和图(e)分别为以两种速度书写单词‘HELLO’和‘WORLD’时的信号。比例尺,20 pF。f 26个字母手写的相关系数。g 26个手写单词的相关系数分布曲线。h 每个手写字母的识别准确率。数据以均值 +/- 标准差呈现,样本量(n)为六。
03
文献来源
Cheng, A., Li, X., Li, D. et al. An intelligent hybrid-fabric wristband system enabled by thermal encapsulation for ergonomic human-machine interaction. Nat Commun 16, 591 (2025). https://doi.org/10.1038/s41467-024-55649-1
