


----追光逐电 光引未来----
RAW图像是sensor出来的最原始的数据。 是光线透过滤镜之后直接得到的数据,每个像素只有一种颜色的数据。
通常情况下,每个像素的数据量是10bits或者12bits,当然也有sensor有其他的8,14,16等等。 RAW的基本介绍可以看这篇文章. 一般的摄像头都会支持RAW格式的输出,这样我们拿到RAW数据之后,是没有办法直接使用的,还要在host端做ISP,做色彩纠正,增强,HDR,插值成RGB,转成YUV,最后再使用。
像amba平台就是直接读取RAW数据,送入idsp来做一系列的3A操作的。另外记录一下,Amba平台对RAW数据有packed和compressed两种设定选择。如果未设置packed,每个像素不管是10位,12位,14位,都会占据2个字节16位,如果选择了packed,则会按照真实的位数排列。
如果设置了compressed,则会进行数据压缩,整体数据量平均每个像素达到27/32个字节。 有些项目,不追求很高的sensor的3A效果,就会直接使用sensor输出的YUV或者RGB,这就是使用了sensor内置的一些差值算法,直接得到图像,比较方便,并且省host的运算资源,但是不够自由,可以调节的东西不多。
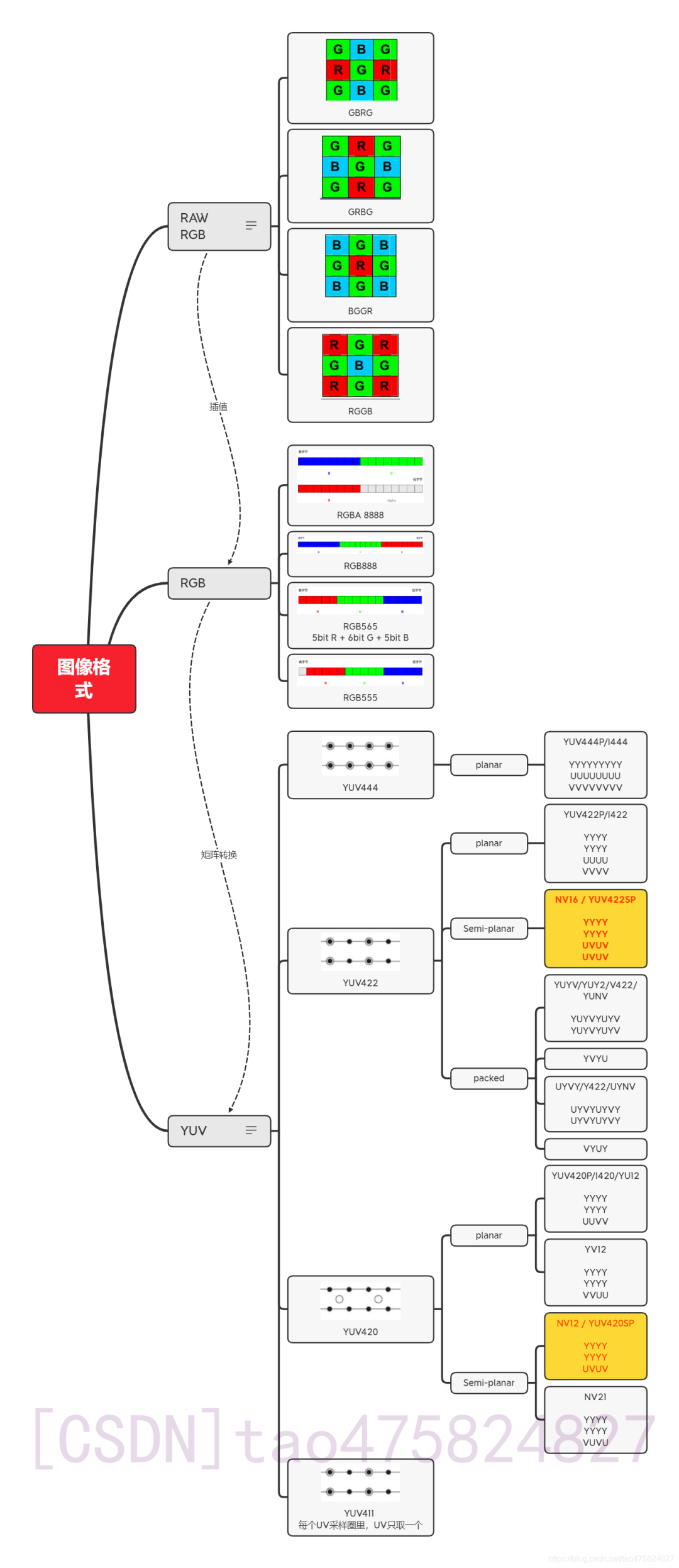
对于RAW数据,会有不同的bayer类型,是GBRG,GRBG,RBBG,GBBR的一种,其实也就是透镜的类型。
但是不管在senosr做还是在host主机做,RAW想用起来,都是要做插值得到真正的RGB图像的。
2 、 RGB
RGB是大家很熟悉的一种类型。三原色的原理就不做太多介绍了。 在windows的绘图板中,我们就可以通过调试三原色不同的比例得到不同的颜色。
在这里插入图片描述 RGB常用的数据格式有 RGB888,RGB565,RGB555这么几种。
3 、YUV
YUV 是一个比较不好理解的类型,而且种类很多. 也是这篇文章的重点。
什么是YUV?RGB很好用,但是他对黑白图像的支持不是很好,因此,人们又会把RGB转成YUV格式。YUV中的Y,表示明亮度(Luma),就是灰度图。
U和V分别对应Cb和Cr,代表色度(Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。
2.3.1 采样方式 分类方式根据采样的不同,分为YUV444,YUV422,YUV420.
YUV444:每个像素点同时包含Y/U/V 3个参数 YUV422:每2个像素点共享一组U/V参数,同时每个像素拥有自己的Y参数 YUV420:每4个像素点共享一组u/v参数,同时每个像素拥有自己的Y参数 2.3.2 排列方式 确定了采样方式之后,数据的排列又分为3种:
planar(注意不是planer,也不是plannar):把Y数据,U数据和V数据单独放置3块位置,形成3个平面 semi-planar:把Y数据独立,UV数据放在一起,形成2个平面。 packed:YUV数据打包在一起,无论单独的Y数据U数据还是V数据,地址都不是连续的。
2.3.3 命名方式 YUV的命名规则也有好几种,因此同一个类型有可能会有好几种名字,
YUVxxxP, YUVxxxSP e.g. YUV422P,YUV420SP 根据plannar,semi-planner 和 packed的类型来定义的,这种感觉最好记。
plannar就是P,注意顺序都是Y前U中V后 semi-plannar就是SP,注意顺序都是Y前UV后。
Ixxx e.g. I422,I420 感觉是plannar的别称 I422就是YUV422P I420就是YUV420P NVxx,YVxx e.g NV12,NV21,NV16,YV12 NV代表属于semi-plannar,12代表一个像素所占的实际bits。
NV12是YUV420SP,每个像素占据1个Y(8Bit)+1/4 个UV(8 * 2 / 4 = 4bit) = 12bits
2.3.4 类型 YUV根据采样方式不同,排列方式不同,命名方式不同,有N多类型。
我基本都总结在文章开头的表格里了,感觉要细分的话还能再分,但是暂时不用这么细吧,实际也用不到,全部记住没什么意义,记住一些常用的即可。
毕竟开发平台定下来之后,几种常用的数据类型也就随之确定了。安霸这边主要就是用NV12和NV16。

申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


