在汽车领域,嵌入式软件的安全性需求不仅仅是理论上的技术要求,而是直接与实际业务场景和用户体验紧密相连的。
随着汽车行业向智能化、自动化、网络化发展,嵌入式软件在保障安全性方面面临的挑战也越来越复杂。
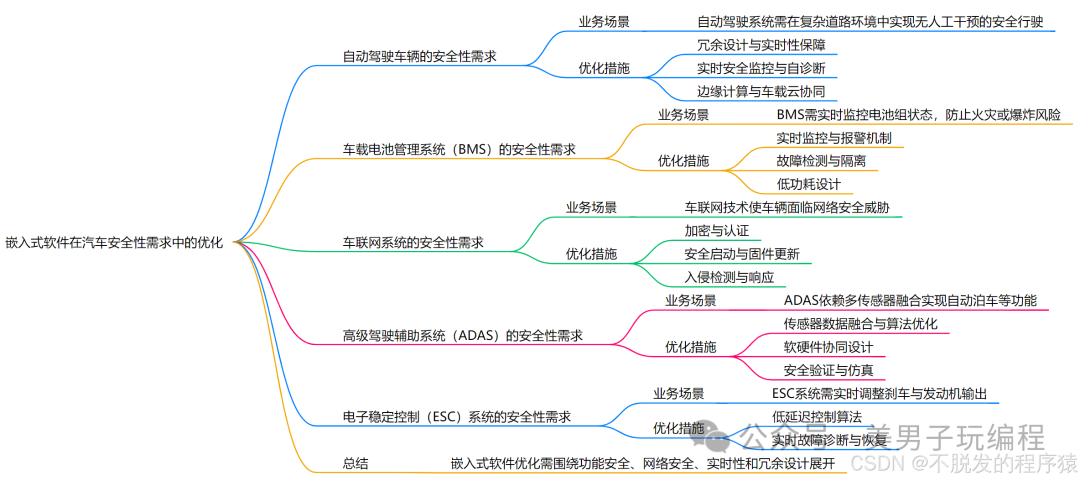
下面将结合具体的业务场景,进一步阐述嵌入式软件如何应对这些挑战,以及优化的具体措施。
在自动驾驶系统中,嵌入式软件需要确保车辆能够在没有人工干预的情况下,安全地在复杂的道路环境中行驶。
这包括实时处理来自不同传感器的数据(如雷达、激光雷达、摄像头、GPS等),对周围环境做出准确的判断,并实时调整行驶路径。
优化措施:
- 冗余设计与实时性保障:自动驾驶系统需要对传感器数据进行多层次的冗余处理。例如,在激光雷达、摄像头、雷达等多个传感器产生冲突或错误时,嵌入式软件需要通过多重数据融合算法,优先选择可靠性较高的传感器输出,以确保决策的准确性。对于实时性要求极高的系统,优化任务调度、优先级管理、并行处理等方面的性能,以保证决策引擎可以在毫秒级时间内作出响应。
- 实时安全监控与自诊断:系统需要具备自诊断能力,实时检测到传感器、算法或执行机构出现故障时,迅速启用冗余机制。例如,当某一传感器失效时,软件需要立即切换到备用传感器,或启用备用决策路径,确保系统不会进入故障状态。
- 边缘计算与车载云协同:在复杂的道路环境中,仅依赖车载计算可能无法满足所有实时需求,因此可以考虑将部分数据处理任务转移到车载云端,以增加计算资源。在软件架构上,实现车载计算与云计算协同工作,利用云端的高性能计算能力优化算法(如深度学习),并通过低延迟通信确保实时响应。
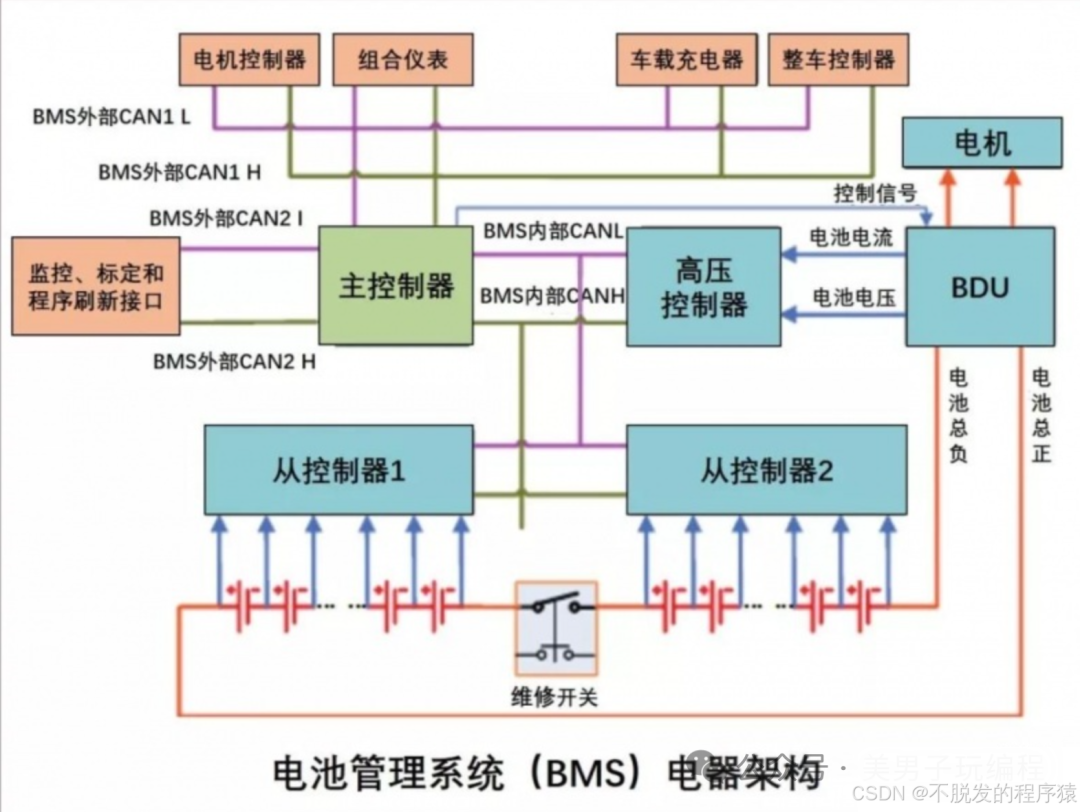
随着电动化的推进,车载电池管理系统(BMS)成为了电动车安全系统中的关键组成部分。
BMS负责监控电池组的状态,确保电池在充放电过程中处于安全的工作范围内。
电池的过充、过放、温度过高等异常情况可能导致火灾或爆炸,因此BMS的嵌入式软件需要确保对这些风险的实时检测和响应。
优化措施:
- 实时监控与报警机制:嵌入式软件需要实时监测电池的电压、温度、SOC(电池荷电状态)、SOH(电池健康状态)等关键参数,并根据设定的安全阈值进行预警。例如,在温度过高或电池电压过低时,系统能够迅速采取措施,比如断开电池连接、降低充电功率,或者启动冷却系统。
- 故障检测与隔离:为了避免单点故障导致电池管理系统瘫痪,BMS系统中的嵌入式软件需要具备多重故障检测能力。可以通过多冗余硬件和算法,确保即便某个电池监控模块发生故障,系统依然能够正常运行。比如,使用故障隔离技术,确保发生故障的电池单元不会影响到其他正常单元。
- 低功耗设计:对于电池管理系统,低功耗是非常重要的优化目标。嵌入式软件应通过优化算法、采用低功耗芯片、采用动态频率调节等方式,减少功耗,延长电池的使用寿命。
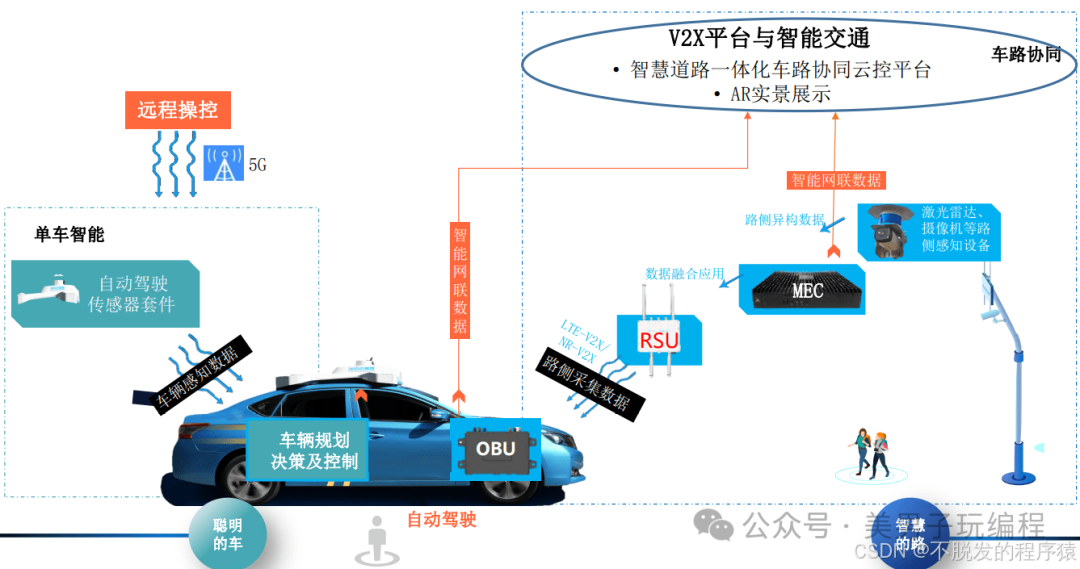
随着车联网技术的普及,越来越多的汽车零部件和系统(如车载娱乐、远程控制、车辆状态监控等)都通过网络进行互联。
这使得汽车面临更多的网络安全威胁,例如远程入侵、数据篡改等。
优化措施:
- 加密与认证:所有车联网通信必须采用强加密算法(如TLS/SSL)来保证数据的机密性和完整性。嵌入式软件需要在通信层面实现端到端的加密,确保从车载设备到云端的每一条数据都无法被窃取或篡改。
- 安全启动与固件更新:车载嵌入式系统需要支持安全启动机制,确保系统在启动时仅加载经过验证的固件。固件的更新也必须通过加密签名和认证机制,确保更新包没有被篡改,并且可以安全地推送到车辆。
- 入侵检测与响应机制:车联网系统需要具备实时的入侵检测系统(IDS)与响应机制,能够检测到异常的网络行为或潜在的安全威胁。例如,通过分析通信流量、日志数据等,识别出可能的攻击(如DDoS攻击、恶意软件传播等),并快速采取防御措施(如隔离、断网等)。
ADAS系统包括自动泊车、碰撞预警、自动紧急制动等功能,这些功能的实现依赖于车载计算平台上的嵌入式软件。
ADAS的核心是通过多传感器融合、环境感知和决策算法,帮助驾驶员更安全地驾驶。
优化措施:
- 传感器数据融合与算法优化:ADAS系统通常依赖多种传感器数据(如雷达、摄像头、激光雷达、超声波传感器等)来感知周围环境,嵌入式软件需要优化数据融合算法,提高感知精度和系统响应速度。算法的优化不仅要考虑算法的准确性,还要确保在实时性和计算资源上的高效。
- 软硬件协同设计:ADAS系统的实时性要求很高,嵌入式软件需要与硬件进行紧密配合。例如,可以利用硬件加速器(如GPU、FPGA等)加速图像处理和数据分析,减轻主处理器的负担,提高整体系统的实时响应能力。
- 安全验证与仿真:由于ADAS涉及到较为复杂的决策过程,在开发过程中需要进行大量的仿真测试,模拟各种道路场景和突发情况。嵌入式软件必须能够支持高效的仿真平台,验证系统在各种极限条件下的表现,确保其在实际环境中能够稳定、安全地运行。
ESC系统通过实时监控车辆的动态表现,自动调整刹车和发动机输出,防止车辆发生侧滑或失控。
这一系统的失败可能导致严重的交通事故,因此对嵌入式软件的可靠性和实时性要求极高。

优化措施:
- 低延迟控制算法:ESC系统要求极低的控制延迟,以便迅速响应车辆失控的情况。嵌入式软件需要采用高效的控制算法,如基于模型的控制、PID控制等,确保控制信号在毫秒级时间内传输至执行单元。
- 实时故障诊断与恢复:ESC系统需要具备自我诊断能力,能够实时检测到传感器、执行器或控制单元的故障,并能够在出现故障时启用备用系统或启动应急模式。
结合具体的业务场景,嵌入式软件在汽车零部件的安全性需求中,不仅要应对功能安全、网络安全等基础问题,还需要考虑各个系统的实时性、可靠性、冗余设计、数据融合等方面的优化。