1.概述
环路补偿,老的工程师经常说电源动态响应不行调调loop gain,,然后一脸懵,啥是loop gain(说的就是环路补偿)?看到他们设计的电路当时觉得好难好复杂,一直觉得电源设计最难的是环路设计和PCB设计。
2.什么是环路补偿?
这涉及到自动控制原理。首先说几个概念。
开环:指信号从输入直接到输出
闭环:指信号从输入到输出后,又反馈到输入。
传递函数:输出Vout/输入Vin,后续简称传函
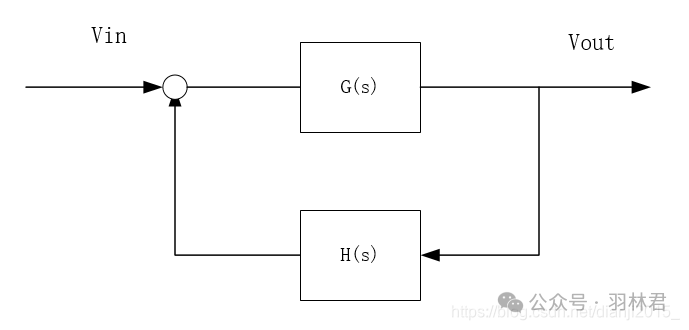
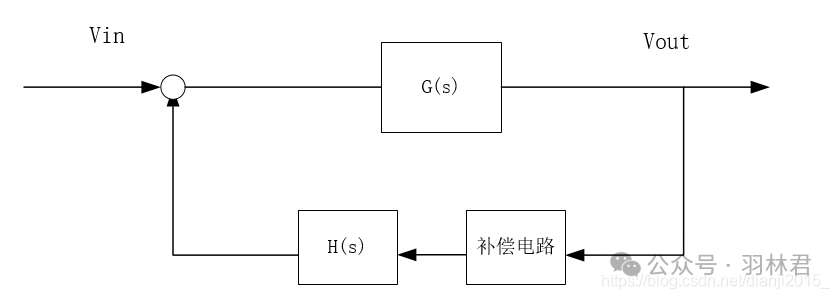
开环传递函数:闭环系统中,开环传递函数是指,断开反馈后,正向传递函数G(S)*反馈传递函数H(S)
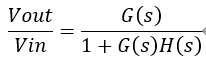
闭环传递函数:G(s)/(1+G(s)*H(s))环路补偿指的是,在闭环系统中,在反馈上加入一种电路,用来补偿系统在扰动时的性能不足,从而维持系统的稳定或者较优的状态。补偿电路一般是运放和电阻电容组成的电路。3.为什么要环路补偿?
3.1环路补偿原因
对于电源而言,引起输出变化的两个因素主要是,输入和负载的变化。而这两者的变化,有可能导致输出不稳定,例如输出电压震荡剧烈或者在一定的时间内无法回到额定输出电压,这对电源来说都是致命的危害,所以要进行环路补偿,使其面对外界干扰时可以无坚不摧。
总结来说,进行环路补偿有以下两个原因:- 从稳态考虑,希望输入和负载变化时,输出能回到稳定值
- 从动态考虑,系统系统在受到干扰后,能快速回到稳定值,并且超调值在可接受的范围内。
3.2环路稳定依据
以上又涉及到下面几个概念。相位裕量和幅值裕量主要表征的是稳态,带宽主要表征的是动态。
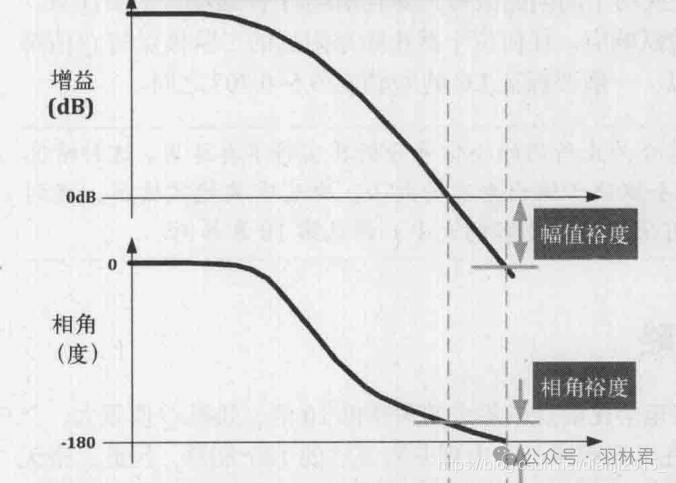
幅值裕量:当相位为-180°时,开环增益与0dB的差,一般电源要求<-10dB。
相位裕量:开环增益为1,即0dB时,对应的相位与-180°之差。考虑到元件容差以及温度对系统影响,一般要求>45°,相位裕量过低会欠阻尼,过高,会过阻尼。幅值裕量一般与相位裕量相对应,-10dB对应60°。这里想顺便介绍下,为什么相位裕量越大,系统震荡越小,反应越慢?这涉及到阻尼的概念。
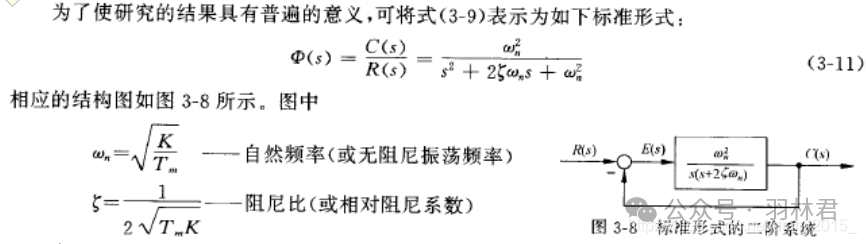
回到自动控制原理。以二阶系统为例说明。阻尼有以下几种情况
- 在(0,1)范围内,有一对负实部共轭复根,单位阶跃响应系统震荡
- 大于1, 过阻尼,单位阶跃响应响应缓慢
二阶系统的开环传递函数如下
从上式可以看出,相位裕量越大,阻尼越大,所以系统响应越缓慢。
带宽:幅频特性下,0频率和幅值下降3dB的频率之间的宽度。带宽越宽,跟踪控制信号的能力越强,表示反应速度越快。穿越频率:开环增益曲线穿过0dB的频率点。一般选择为开关频率的1/5-1/10.
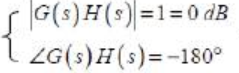
那么问题来了?为何比较点是增益为0dB,相位为-180°?
我们来看闭环的传函分母为0时,传函无穷大。在这种情况下,一个固定的输入导致输出无穷大,这对实际系统来说,太可怕,这种情况下,系统就是不稳定的。分母为0要保证以下两点- 而进行环路补偿的目的,就是保证以上两个条件永远不能满足。
4.如何进行环路补偿?
4.1 补偿器的特点
上一节说明了补偿器的根本目的,就是保证开环传函的分母永远不能为0,也就是说增益要尽可能的远离0dB,相角要尽可能的远离-180°.
补偿器的目标:
- 穿越0dB时,斜率为-1,这个可保证环路带宽不至于过小。
- 一个为0的极点,简称零极点。作用是相当于加入积分器,可保证增益。
- 两个零点,位于LC双极点的附近,用来抵消LC极点带来的影响
- 一个极点,位于电容ESR带来的零点处,用于抵消ESR带来的影响。因为电容ESR带来的影响不是固定的,会受外界因素的影响,所以需要抵消其影响。
- 一个高频极点,用来让高频信号衰减的更快。
什么时候抵消零点,什么时候抵消极点,抵消哪种零点和极点,为什么要这样抵消?
为了弄清楚以上问题,我们必须明白零极点对系统带来哪些影响。
4.1.1 极点的影响
极点:开环传递函数中,分母为0的点。
极点对传函的影响如下:
- 每增加一个极点,相位就减小-90°。我们平时见的低通滤波器就是单极点系统。
4.1.2 零点的影响
零点:开环传递函数中,分子为0的点。
极点对传函的影响如下:
零极点的影响导致了在低频时增益大,高频时增益小,所以增益曲线呈下降趋势,可以看成一个低通滤波器,这也可以与穿越频率决定环路响应快慢对应起来,因为穿越频率越大,输入信号通过的频率越多,越能还原原本的波形,所以响应快。
4.2 补偿器的分类
补偿器一般有三种:单极点补偿,双极点单零点补偿,三极点双零点补偿。极点数总是多于零点数,这样可提高系统的阶数,保持稳定。
1. 单极点补偿(type I)
2. 双极点单零点(type II)
适用于功率部分只有一个极点的补偿。如:所有电流型控制和非连续方式电压型控制。3. 三极点双零点(type III)
适用于输出带LC谐振的拓扑,如所有没有用电流型控制的电感电流连续方式拓扑。4.3 buck电路的环路设计
设计环路的基本步骤如下:
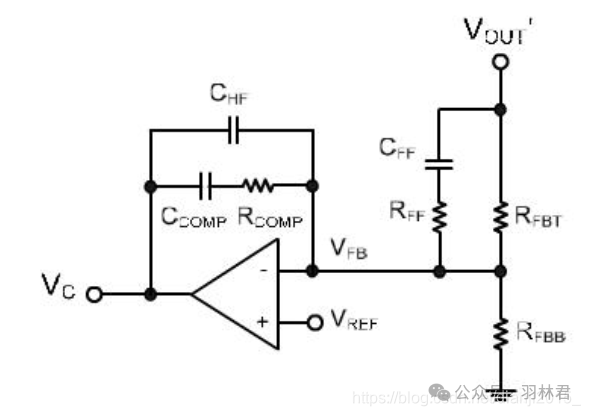
电压控制型buck电路是指,用buck的输出电压作为反馈,进行比较后产生PWM波。一般采用typeIII补偿器进行补偿。
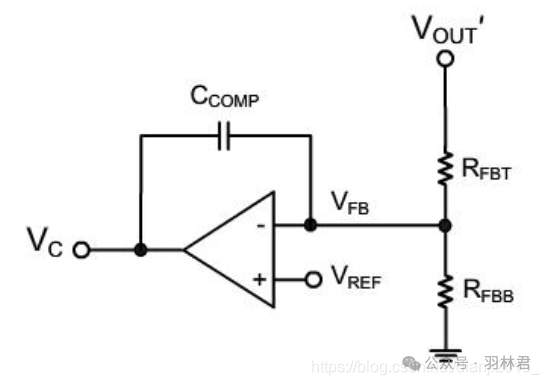
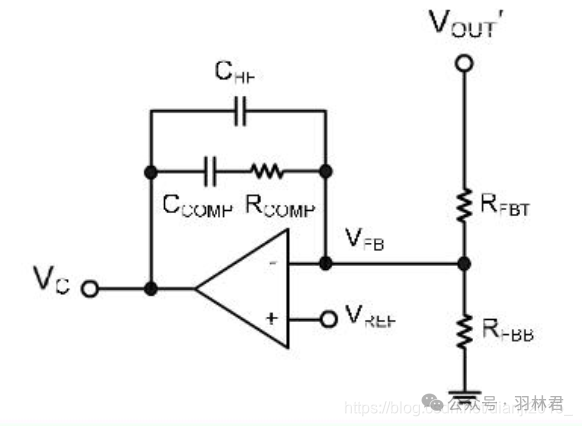
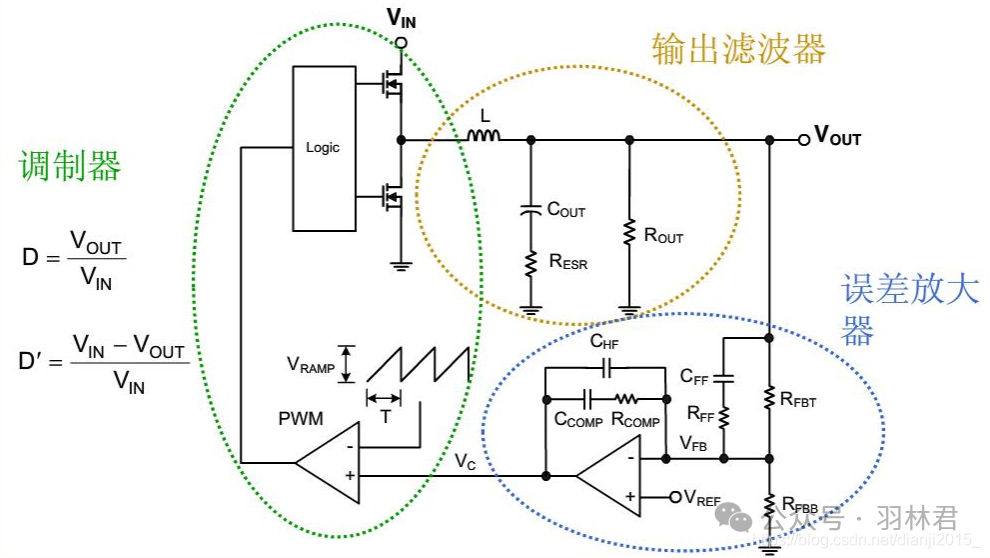
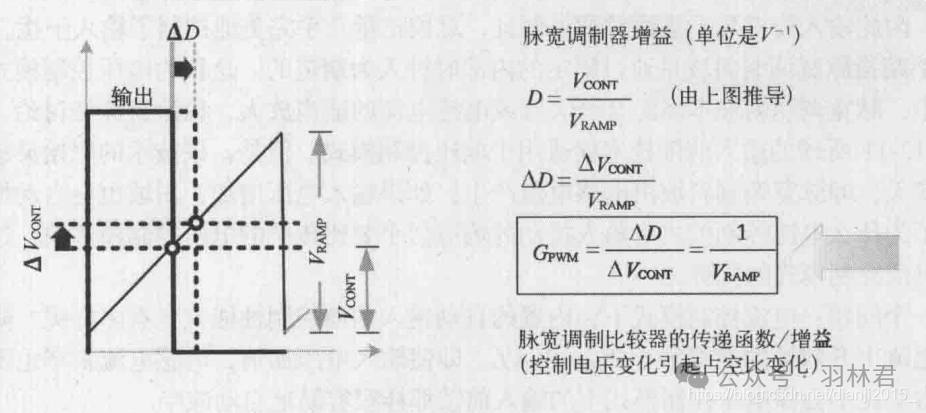
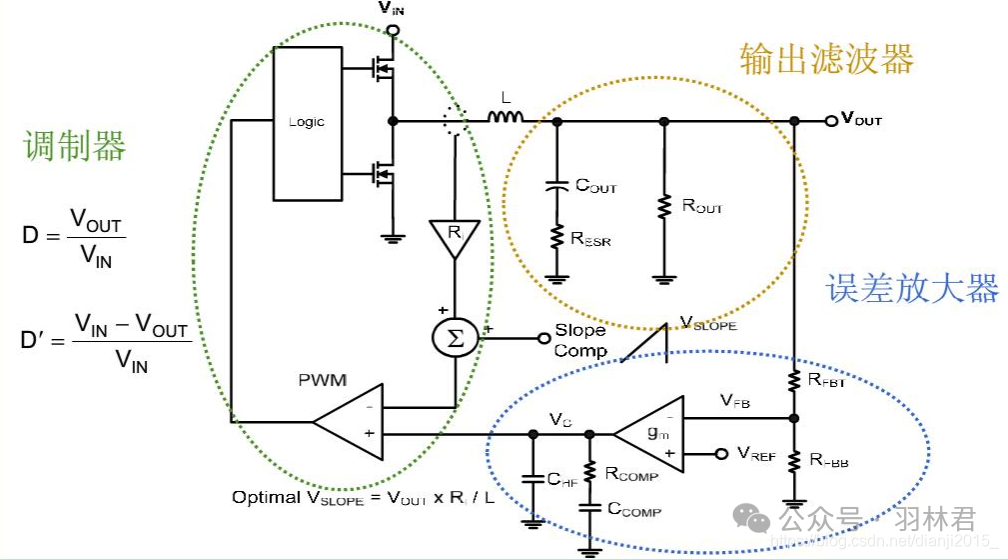
下面是电压型buck电路的原理框图,包括pwm产生电路,主功率电路,输出滤波,误差放大器。PWM产生电路的传递函数Vram是三角波的峰峰值。
主功率电路的传函为:Vo/D=Vin
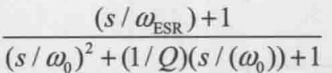
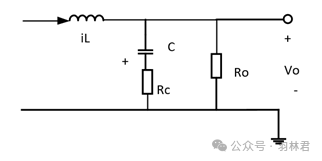
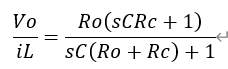
LC滤波电路(加上电容的ESR)的传函为:电容的ESR带来的零点频率为Wesr=1/(ESR*C)
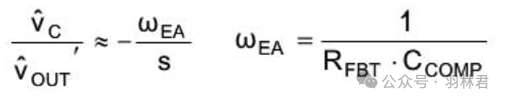
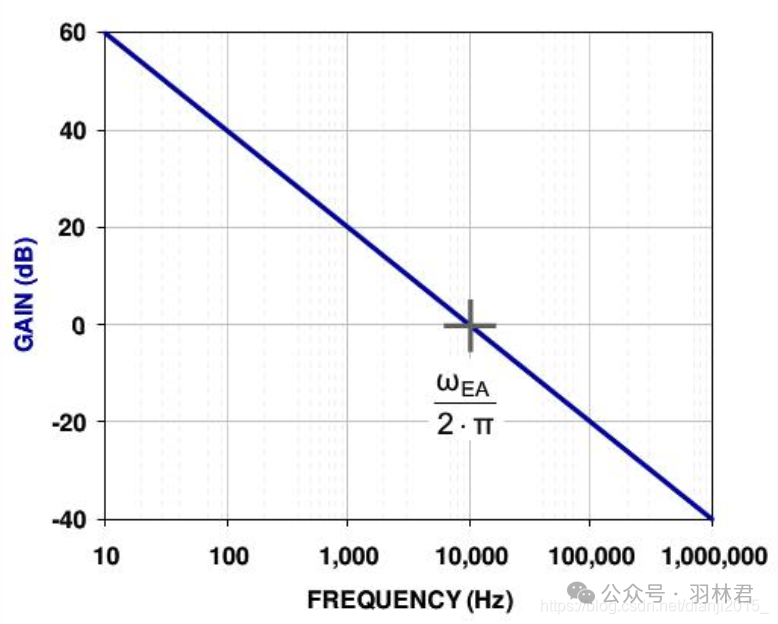
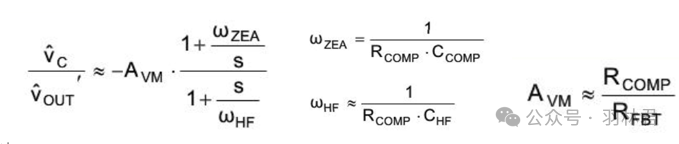
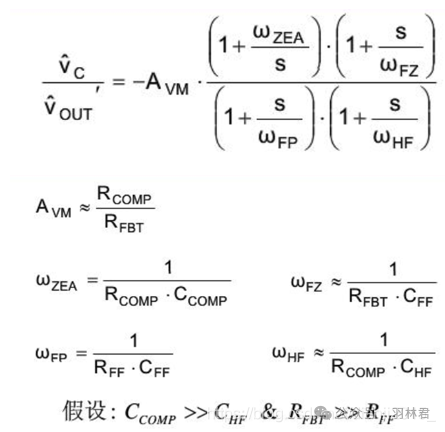
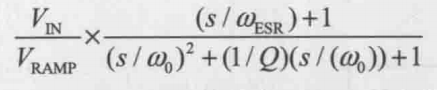
所以从误差放大器出来到Vo的传函为:下面进入误差放大器的设计。
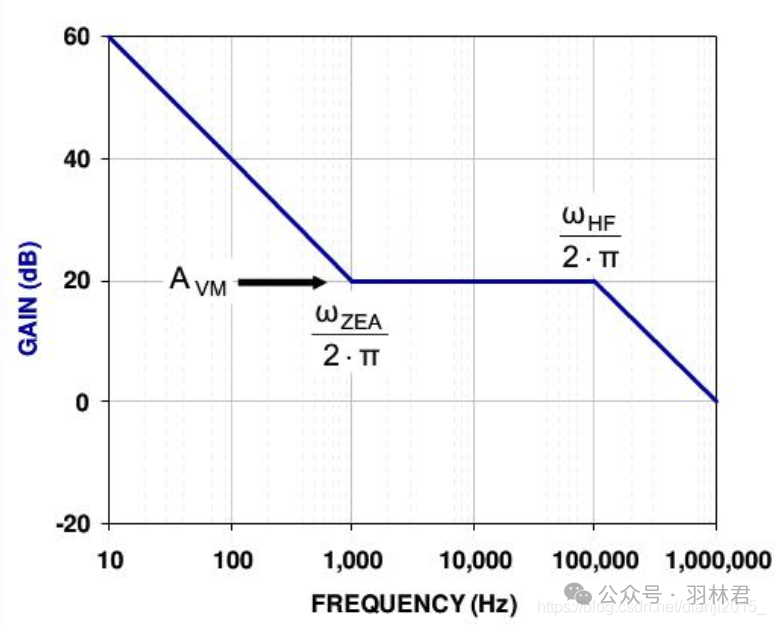
1)求出原传函的零极点
2)确定穿越频率为开关频率的1/10
3)让补偿器的零点等于传函的LC极点,选择合适的电阻电容
4)让补偿器的某一极点等于电容esr带来的零点,确定电阻电容
5)高频极点为穿越频率,确定电阻电容
6)重新求相位裕量以及幅值裕量4.3.2 电流控制型
电流型buck电路是指,不仅采用电压作为电压负反馈,而且还要电感电流(一般是峰值电流)作为电流反馈,由于是电感电流,所以少了一个L带来的极点,一般采用typeII型补偿器进行补偿。
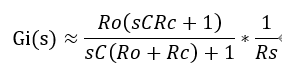
PWM产生电路的传递函数:Vc/iL=Rs,Rs为mos电流的采样电阻
主功率回路+滤波电路传函:接下来的误差放大器的设计步骤,与上一节电压控制型误差放大器设计步骤一致。
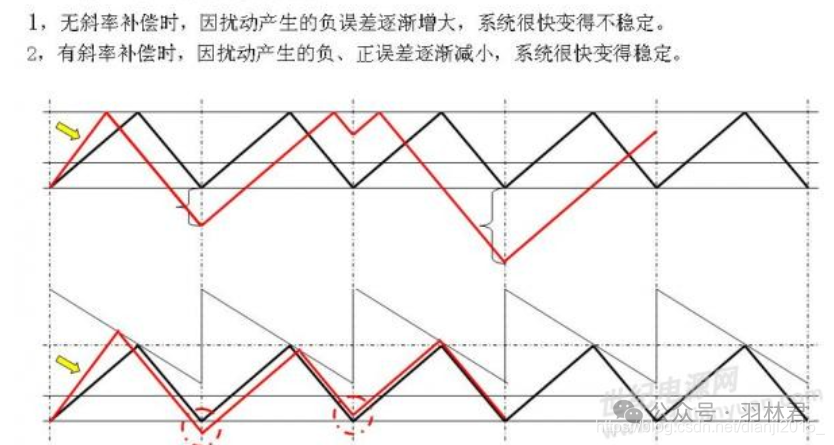
电流型buck的优点是补偿电路简单,响应快,但是缺点是容易出现次谐波震荡,需要加入斜坡补偿。
下面介绍次谐波震荡和斜坡补偿。(1)次谐波震荡
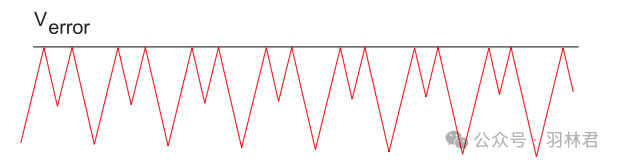
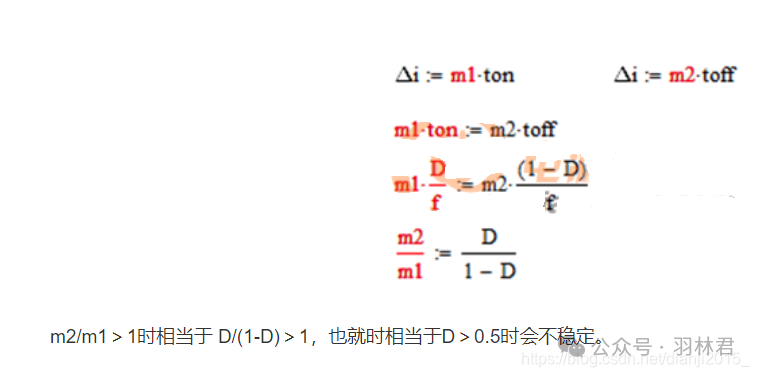
次谐波震荡:一般出现在电流控制模式下,电流连续且占空比大于50%,出现1/2的频率。
产生原因:占空比大于50%后,电流上升时间大于下降时间,使得还未下降到初始值就进入电流上升期,由于到达峰值电流时间短,所以占空比缩小,这样看起来出现大小波的情况,也就是次谐波。若出现扰动,系统会不稳定。这样看来,重载比轻载容易出现次谐波振荡,因为同样输入条件下,重载要的占空比大。要求电流上升斜率大于下降斜率,否则会不稳定,推论如下,m1是电感电流的上升斜率,m2是电流的下降斜率(2) 斜坡补偿
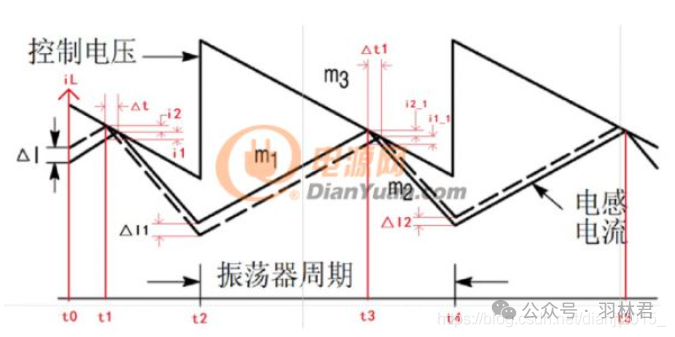
在电流上叠加一个负的固定斜坡的电流,减少电流环在1/2谐波的增益。实质是使得电流控制模式看起来更像电压控制模式,因为电压控制模式就是采用固定斜坡的锯齿波。如上图所示,在控制电压上,叠加一个下降斜率为m3的斜坡,这会使得电流上升时间缩短,下降时间延长,只要保证m3>m2/2系统就能稳定。为了方便,在buck电路中,选择m3=m2=Vo/L
斜坡补偿后,偏差会越来越小。参考书籍:
《精通开关电源设计》
《开关变换器的建模与控制》来源:https://blog.csdn.net/dianji2015_/article/details/109636020‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读
【1】jetson nano开发使用的基础详细分享
【2】Linux开发coredump文件分析实战分享
【3】CPU中的程序是怎么运行起来的 必读
【4】cartographer环境建立以及建图测试
【5】设计模式之简单工厂模式、工厂模式、抽象工厂模式的对比