作者 | 宋子乔
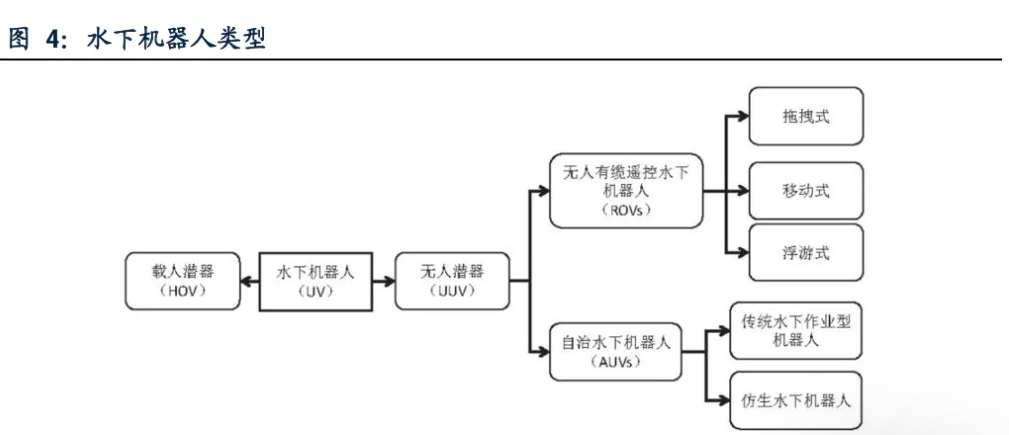
AUV是一种自主导航的水下机器人,能够在没有人工实时控制的情况下,依靠预设指令自主决策和执行任务,主要用于科学研究、环境监测、海底地形测绘等需要大范围自主探测的任务;ROV通过脐带电缆与母船连接,由操作员实时遥控操作,适用于需要精细控制和实时反馈的任务,如海洋石油开采、水下维修、搜救任务等;UUV是一个更广泛的概念,指的是所有无人驾驶的水下航行器,涵盖了AUV和ROV的应用领域,特别在军事侦察、反潜作战和水下基础设施检查中发挥重要作用。