

大家好,我是麦鸽。
上回拆了几个扫地机器人的激光雷达,手残党亲测!把激光雷达大卸八块后,我发现了这些惊天秘密...
原本只是想看看它怎么做到360°扫描的,结果发现主板上有几个可疑的芯片—— 丝印模糊。
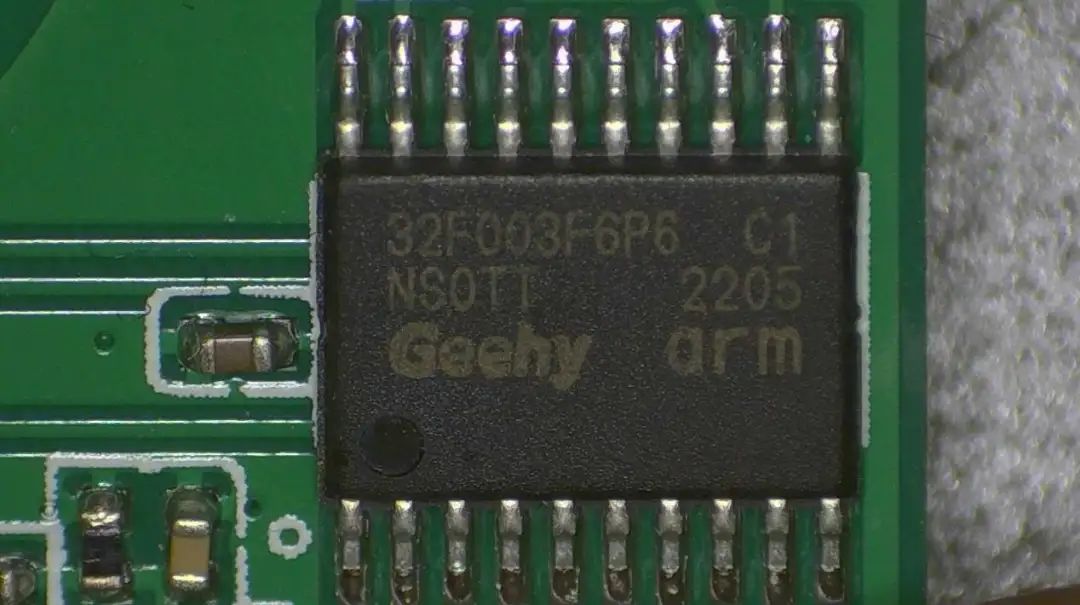
首先主控芯片用的是Geehy32F003F6P6,如下图所示;
读者互动:红外对管传过来的到底是啥数据?
之前有朋友在评论区问:“激光雷达里的红外接受管传输的到底是什么数据?”
其实原理不复杂:红外发射管发出信号,接收管将光信号转为电信号。
但问题来了——反射信号的强弱会被处理成电压变化,这时候就需要一个元器件来判断电压是否超过阈值,这样就可以转换成稳定的0和1的数字信号,最终送给单片机。
而这个大概率就是我找到的芯片 —— 电压比较器!
之前已经看过这个芯片的内部架构图,没有集成运算放大器,也没有电压比较器;
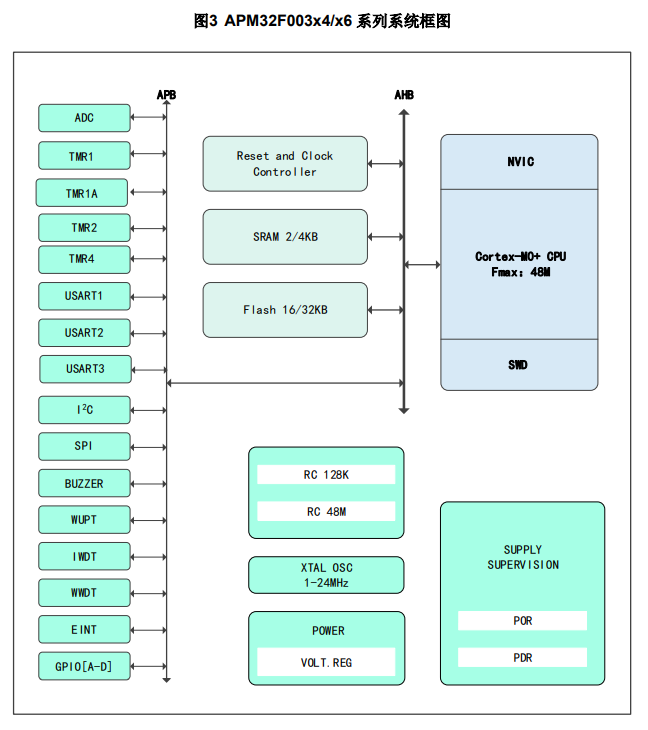
那么这样只能从外围芯片下手啦。找了一圈,发现两颗可疑的芯片。
一个丝印是R1IF
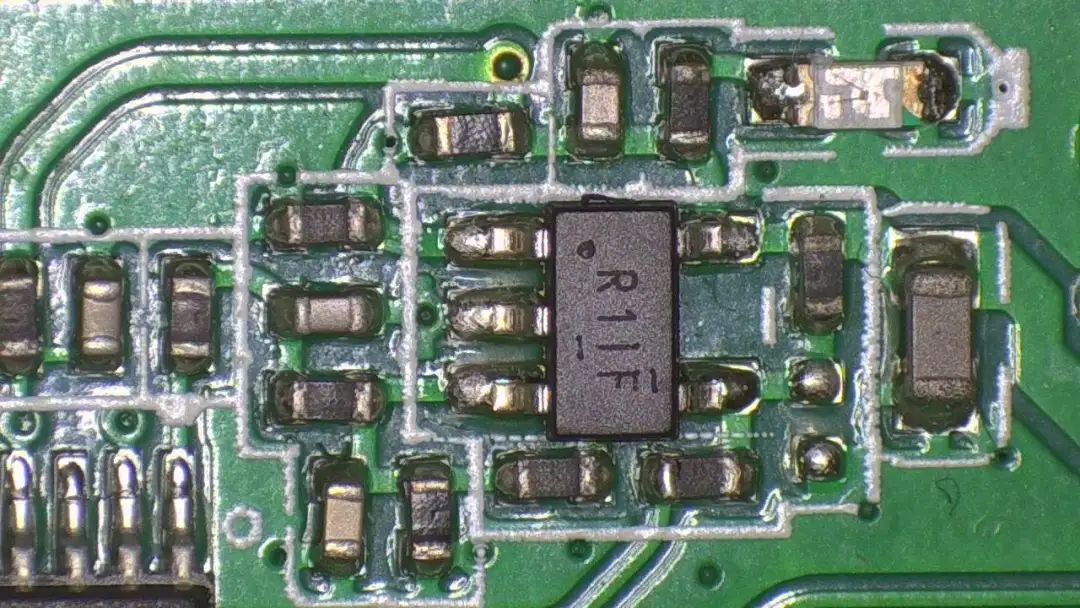
另一个芯片是比较神秘的一串英文加图标。 找了很久,找不到出处。
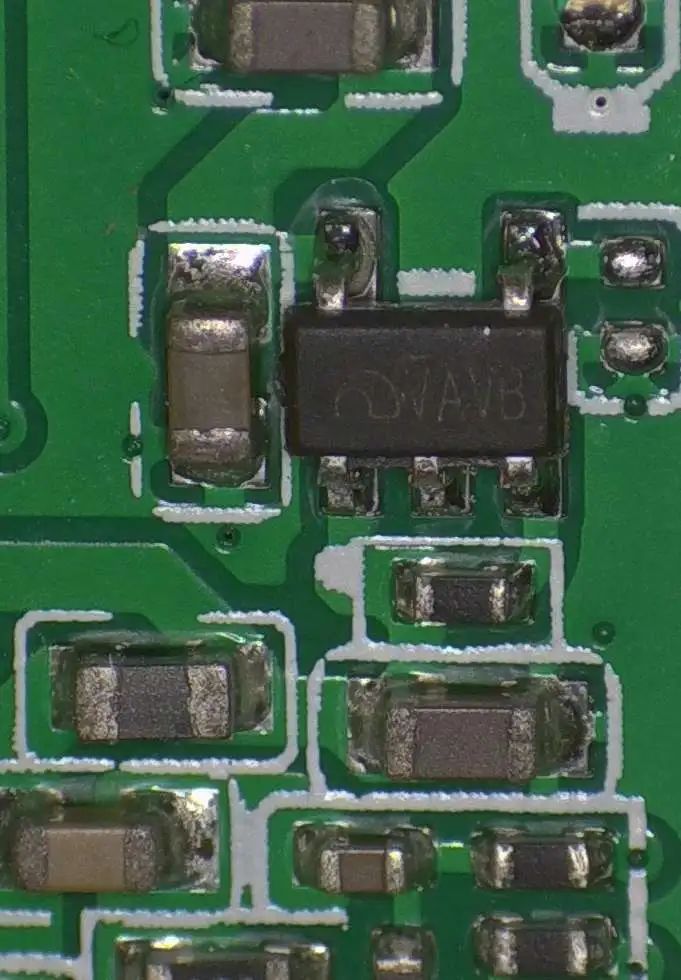
技术支招:如何靠丝印查芯片?
octopart.com:输入丝印可匹配型号。www.alldatasheet.com:支持模糊搜索。https://www.chipdocs.com:提供丝印查询工具。还有很多🐂🍺的网站,欢迎大家推荐;
具体型号就是LMV331,德州仪器(TI)推出的单通道低电压比较器。还有一款比较常用的上LM339。
电压比较器通过差分放大电路比较两个输入端的电压(同相端和反相端),当同相端电压高于反相端时,输出高电平;反之则输出低电平。这种特性使其广泛应用于阈值检测、开关控制、电平转换等领域。
部分比较器内置滞回电路(如施密特触发器),通过设定上下阈值电压避免输入噪声导致的输出振荡,提升稳定性。
不难发现,红外对管在激光雷达中的核心作用是通过光信号检测障碍物距离。其工作流程可分解为三个关键环节:
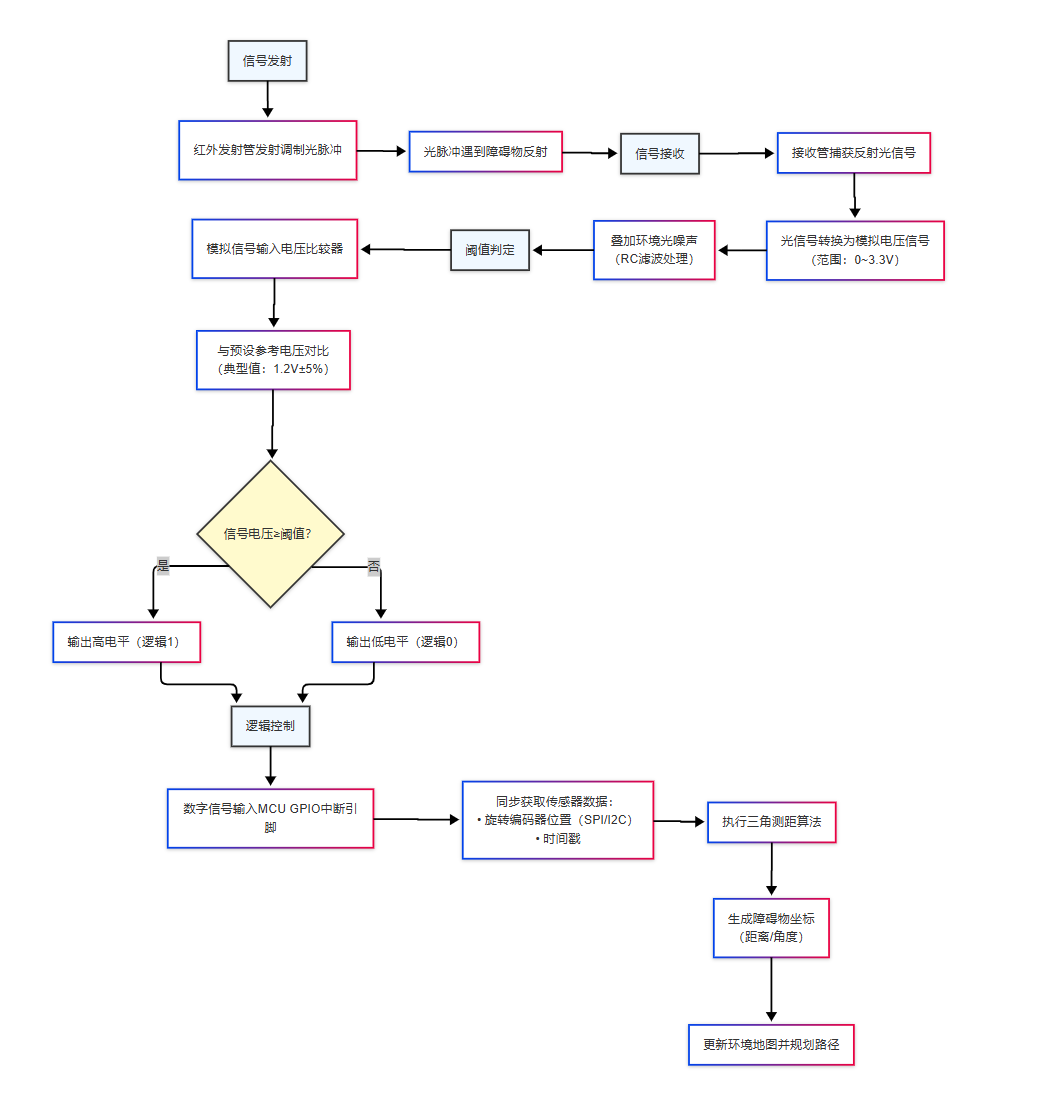
信号发射与接收:红外发射管以特定频率发射调制光脉冲,遇到障碍物后反射至接收管,接收管将光强变化转换为模拟电压信号(通常为0~3.3V范围);
阈值判定:接收端输出的模拟信号存在环境光干扰及噪声,需通过电压比较器将其与预设参考电压对比。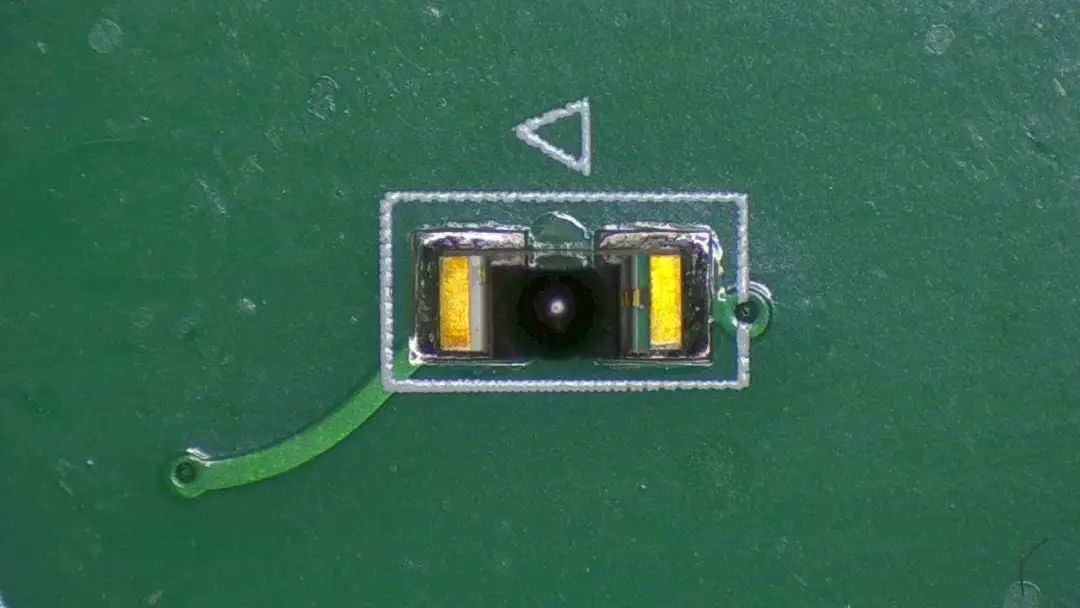 当反射信号电压超过阈值时,比较器输出高电平(逻辑1),反之保持低电平(逻辑0),实现模拟信号到数字信号的转换;
当反射信号电压超过阈值时,比较器输出高电平(逻辑1),反之保持低电平(逻辑0),实现模拟信号到数字信号的转换;
逻辑控制:比较器输出的数字信号输入MCU(微控制器单元),由MCU结合激光雷达旋转编码器的位置数据,通过三角测距算法计算障碍物距离与角度,最终生成环境地图并规划清扫路径。
🫵兄弟们!一个人单打独斗确实能冲得挺快,但要想走得更远、更稳,还得靠一群志同道合的伙伴啊!
👊 麦鸽的知识星球现在已经聚集了一波人,大家都在这里互相学习、共同进步。
如果你也想找个靠谱的学习圈子,赶紧 戳链接 🔗 加入我们吧!
在这里,你能读到星球专栏的干货,优质教程,练手项目,随时向麦鸽提问,还能帮你定制学习计划。别犹豫了,兄弟,一起冲!💪
往期推荐
