

自举电路在电平位移驱动电路应用很广泛,电路非常简单,成本低,而且有很多实际案例可以抄作业,不过,由于系统往往存在特殊或极端工况,如设计不当调制频率或占空比不足以刷新自举电容器上电荷,电容上的电压不够,低于欠压保护值UVLO,这时候就出现了系统故障,严重时会损坏系统。所以英飞凌在相关的数据手册和应用指南中有详细设计指导和工况分析,分析了电压纹波,启动过程的阶跃响应和三相空间矢量(或三相正弦波+3次谐波)调制的情况。
自举电路原理
在研究半桥拓扑中使用的自举电路元器件取值大小细节之前,需要复习前两篇提到的一些基础知识,为此我们再放一张简化等效电路有助于分析加深理解(见图1)。
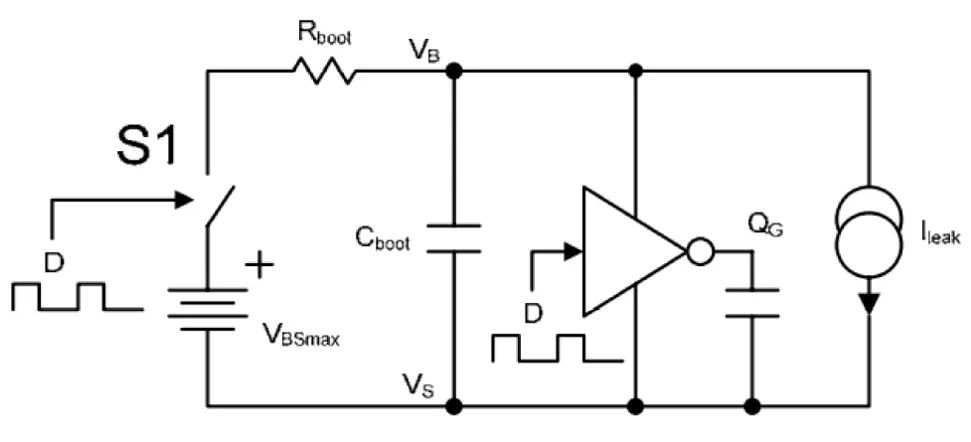
图1. 自举电路的等效电路
自举等效电路简化了VBS即自举电容器Cboot上的电压特性作为模拟调制开关S1开关状态函数的计算,也简化其与占空比(D=占空比=T(ON)/T≡1-D)、栅极电荷QG、漏电流Ileak以及自举电阻Rboot和自举电容Cboot的计算。
VBSMAX代表电源电压、加上或减去自举电路的静态电压降。
自举电压纹波和平均值
研究自举电路动态过程的最好方法是仿真,下面举一个数值的案例做些分析:
图2显示了不同自举电容在10%的占空比时的效果,不难发现电容值的大小只影响VBS纹波(平均值保持不变)。而图3所示为Cboot等于47nF和1µF(预充电到VBSMAX=15V),占空比等于DMIN=10%或30%时的仿真结果。
绿色和黄色曲线表示47nF自举电容器的VBS。紫色和红色曲线表示使用1µF自举电容器的VBS。
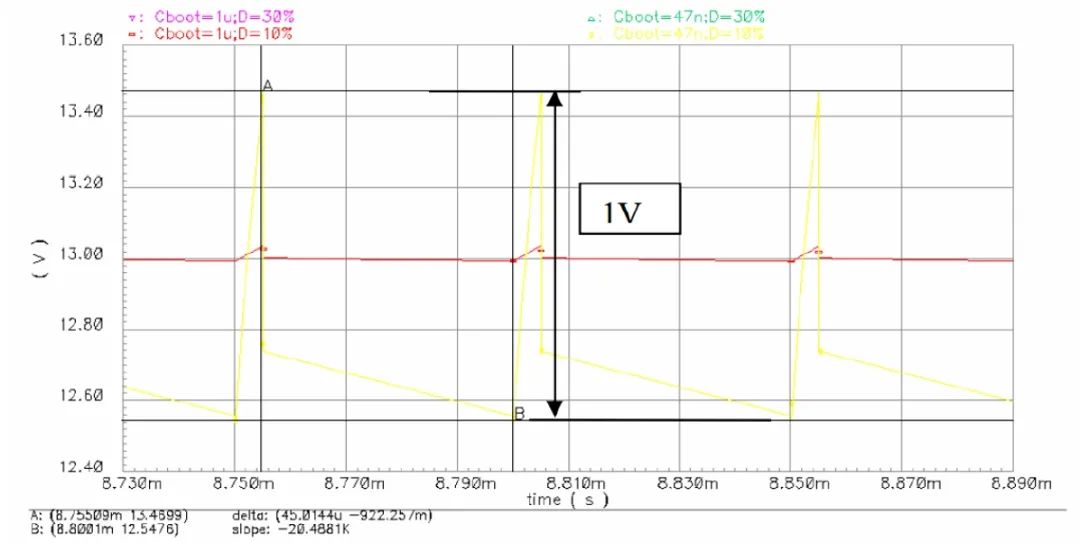
图2. 纹波与自举电容
自举电路的时间常数
自举建立过程是建立在下管导通期间,这时候半桥电路已经开始工作了,但上管平均自举电压的建立是需要一个过程,图3显示了系统在自举电容器完全充电至15V(D=100%)时的阶跃响应。从图中可以看出,平均自举电压VBS的行为类似于单阶系统,其时间常数由下列公式计算得出。
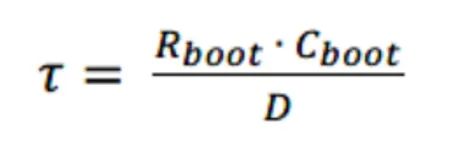
通过占空比与系统阶跃响应之间的关系,我们可以了解到,占空比越小,时间常数(τ)越大,因此响应越慢,建立平均电压时间长,如红色曲线,而占空比越高,响应越快,达到平均电压时间短,如粉红曲线。
从上面公式还可以看出,达到平均电压的时间与电容大小也有关,电容小则时间短,可以比较粉红色和绿色的平均电压建立过程曲线。
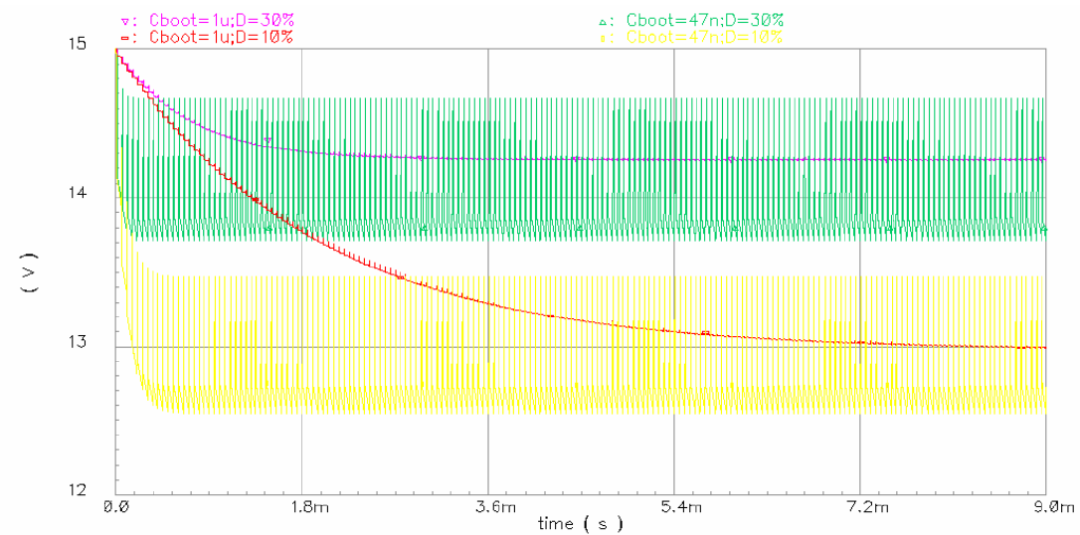
图3. 开关的占空比与自举电容
图4中显示了两种占空比:
1. Rboot=220Ω、Cboot=1µF、D=10%,红色曲线;

2. Rboot=220Ω、Cboot=1µF、D=30%,粉红色曲线;

看到占空比是10%时,时间常数是2.2ms,当占空比提高到30%时,时间常数只有733μs.
按照上一篇文章的稳态讨论结论:
QTOT=QG+Ileak*TOFF=QG+Ileak*(1-D)*TS,
QTOT在低占空比时会增加。在这种情况下,就需要采用较大的自举电容器,以控制纹波和增加平均电压时间常数。
自举电压与基波的关系
由于有自举电阻和电容存在,可以认为其是占空比变化的自适应滤波器。以正弦调制加3次谐波注入的为例,在仿真中,一个基于正弦波基波加上3次谐波调制的PWM信号被送到电路中(TS=50µs,频率=fe)。
图4显示了不同输出频率下的预期(计算值)VBS。占空比用角度表示(等于2πfe,其中fe为输出频率)的函数(正弦+3次谐波),该角度从0°到360°。
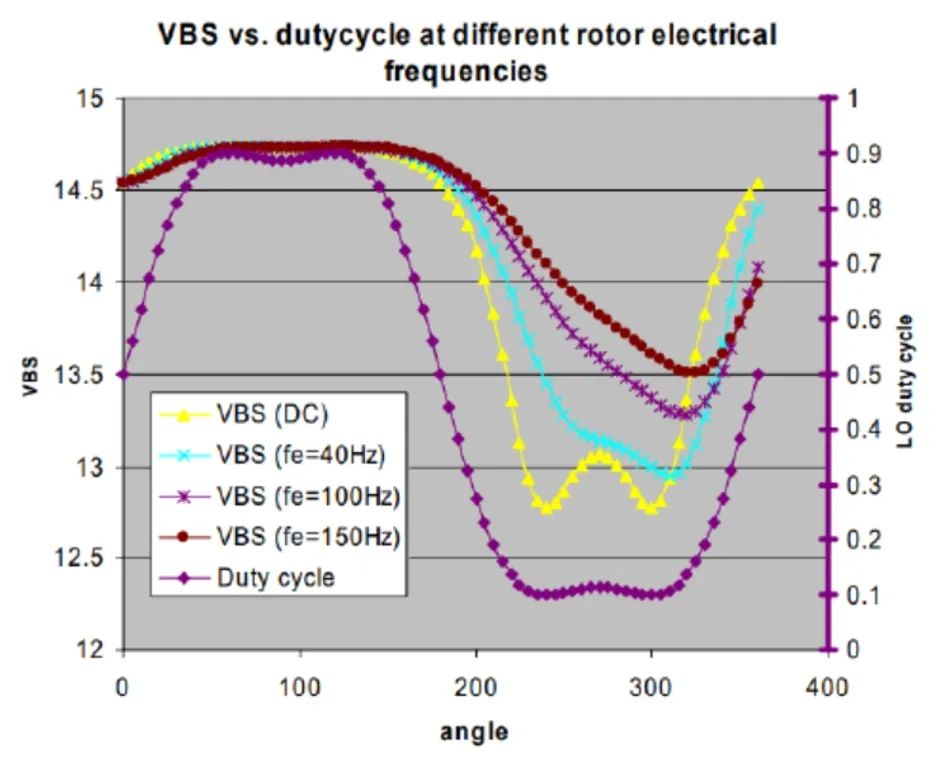
图4. 不同输出频率下的VBS
系统的不同输出频率也会影响自举电压值,即不同fe得到的VBS电压,基波频率低,自举电压纹波就大。黄色曲线VBS(DC)代表使用前面提到的静态方程时得到的曲线,是最最严酷的工况。
本文的例子是使用三相空间矢量(或三相正弦波+3次谐波)调制的情况。其他类型的调制时的工况需要另外分析。
结论:
系列文章
驱动电路设计(一)——驱动器的功能综述
驱动电路设计(二)——驱动器的输入侧探究
驱动电路设计(三)---驱动器的隔离电源杂谈
驱动电路设计(四)---驱动器的自举电源综述
驱动电路设计(五)——驱动器的自举电源稳态设计
参考资料
1.《IGBT模块:技术、驱动和应用》机械工业出版社
2. 微信文章:自举电路工作原理和自举电阻和电容的选取
3. 微信文章: 新品 | 带有集成自举二极管和OCP的1200V半桥栅极驱动器2ED132xS12x系列
4. AN-1123 Bootstrap Network Analysis: Focusing on the Integrated Bootstrap Functionality

欢迎点击卡片
关注电子电力工程师园地

