

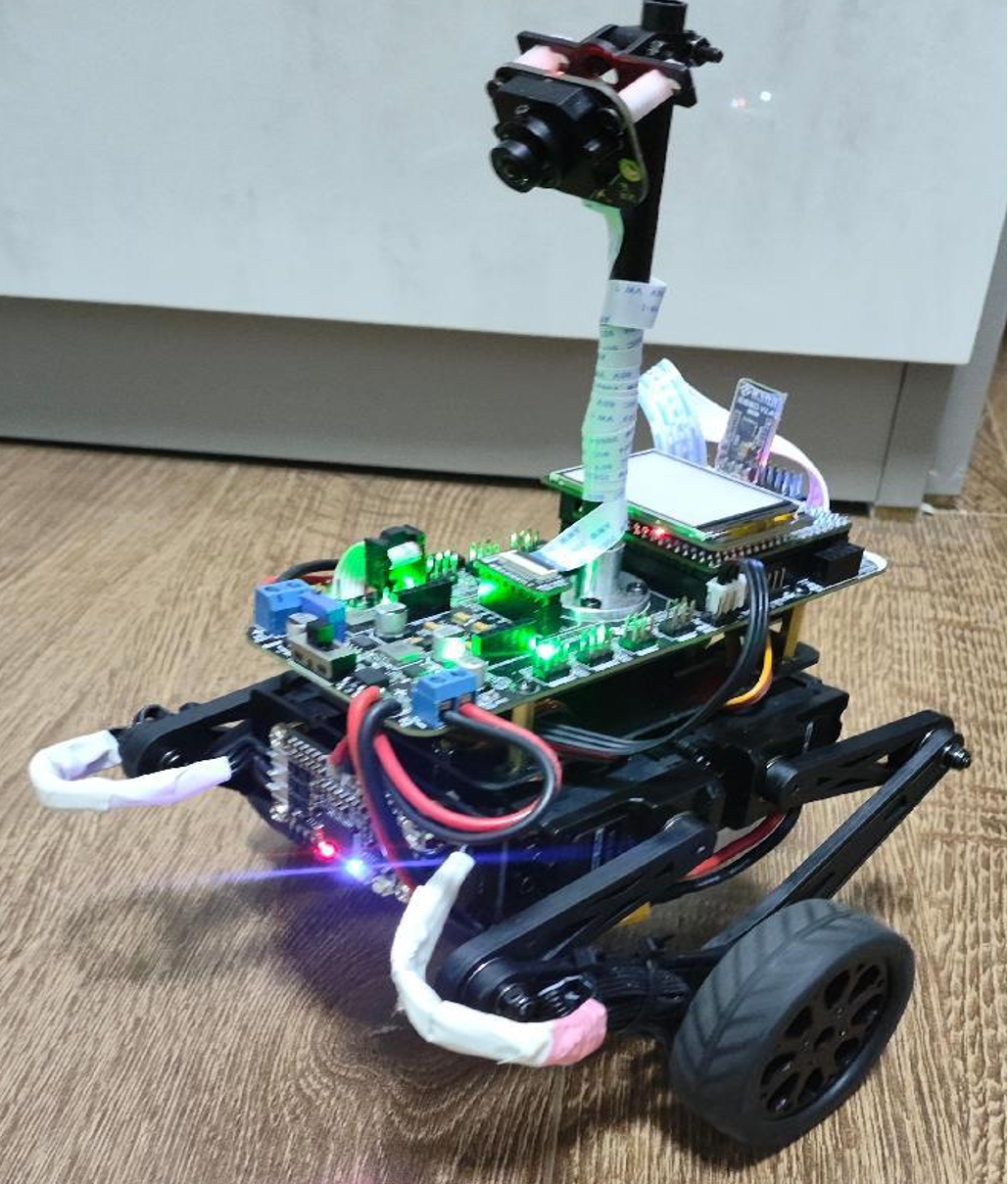
参加第二十届的车友们大家好,今天给大家分享第二十届平衡轮腿组浅析。关于轮腿组的规则卓老师已在CSDN上发布两三个月了,大家应该都有阅读,今年轮腿组是第一年加入智能车竞赛。相较于以往组别,轮腿组的灵活性更强,但同时任务量有所增加,除了轮腿的平衡控制以外,任务还集中在腿部的控制和硬件驱动两个方面。相较于以往平衡车,其实轮腿带来的变化并不太大,同时轮腿因为可以变化腿部,控制上限更高,更容易发挥出大家的创意,难点应该在如何做好腿部运动下的平衡控制,硬件设计和竞速这三件事上。

提到轮腿,大家首先想到的是车模可以跳跃了,但其实对于轮腿组别的车模,并非能跳的就是越好。首先,因为还是要把平衡做完美,智能车竞赛终究还是竞速赛,想要在目前设定的赛道上跑出好的速度,车模的平衡性一定要良好,否则可能遇到半路摔跤等问题,反而不行;其次因为主板、驱动板、舵机板、电池、陀螺仪等关键部件必不可少,将这些部件安装在车模上,要考虑好车子重心,否则反而会给平衡增加难度。而且车模的重心不宜偏高,不利于转向控制,容易出现侧翻情况。
对于硬件来说,将板子的集成度很高,会增加负责硬件同学的压力,但同时提升了硬件同学的竞赛参与感。车模作品的临场适应能力很重要,想要稳定的发挥出小车平时训练的速度,需要各位更深入细致的考究和打磨硬件电路,防止出现跟本鸭去年同样的硬件问题。车友们需根据自身实际情况来挑选适合自己的方案。
虽然以前就引入了平衡车模,但是针对今年的新变化,对于刚参加比赛的同学来说,想要做好且能在比赛中脱颖而出依然是一项具有一定难度的挑战。所以本文将针对这一组别进行简单的赛题分析和备赛思路浅析,为新老车友提供一点备赛思路上的参考,愿可达鸭能够陪伴大家一起成长。

第二十届的轮腿组出现了新的路障:单边桥。单边桥考验轮腿组的灵活性,同时对速度进行了限制,大家需要权衡速度控制和稳定性之间的关系。
这里提供一个思路实现单边桥控制。
轮腿通过改变腿部舵机角度,实现改变腿的高度。要得到轮腿的腿长需要对轮腿的腿部平面五杆机构进行运动学解算。而轮腿倒立摆模型中需要运用虚拟模型控制VMC(virtual model control)的思想,五连杆参数定义如图所示。
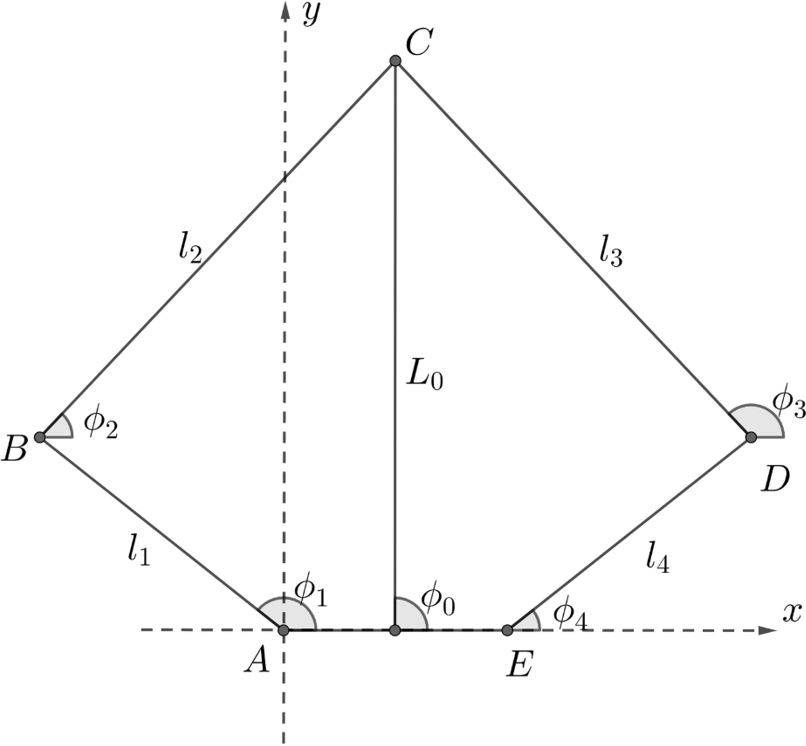
如图,有:

求解方程组可得角度∅_2:

其中:
得到角度∅_2后即可解算出C点坐标。
我们在这通过运动学逆解,即已知C点坐标,求∅_1和∅_4。∅_1和∅_4可以直接通过舵机输出。实现腿部改变。
在一个轮子上单边桥后,小车的整体会向另一侧倾斜,此时陀螺仪的roll轴上角度发生较大偏差,根据车体长度L和夹角roll,通过简单的三角函数知识,可以知道在竖直方向实际倾斜高度:
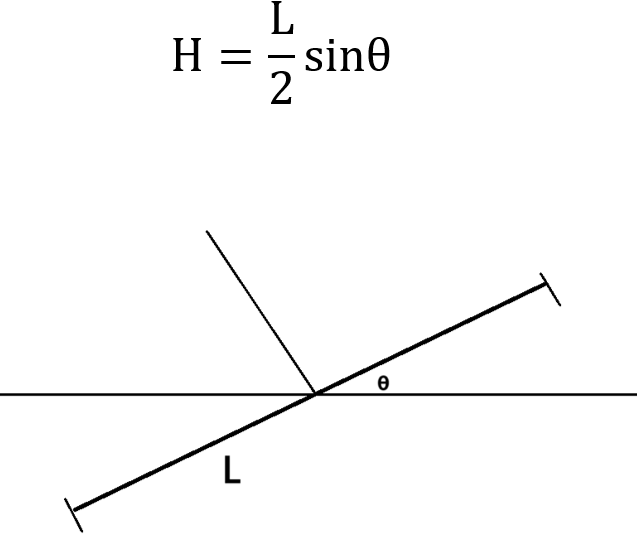
由此腿部应变化来使roll轴的角度趋近于0,假设左腿上单边桥,可得,左腿应收高H/2,右腿应伸长H/2。
有同学向我反应,在单边桥上小车老是往上单边桥的那一侧拐弯,导致小车很容易掉下单边桥。这是因为在平地上,我们期望小车向前直行,那么左右轮转速就会差不多相等。但是在楔形的单边桥上的轮子,行驶的路程永远要比平地的轮子多,在同一时间内,平地上轮子在水平面上的位移要大于单边桥上的,所以肯定会往那边拐。
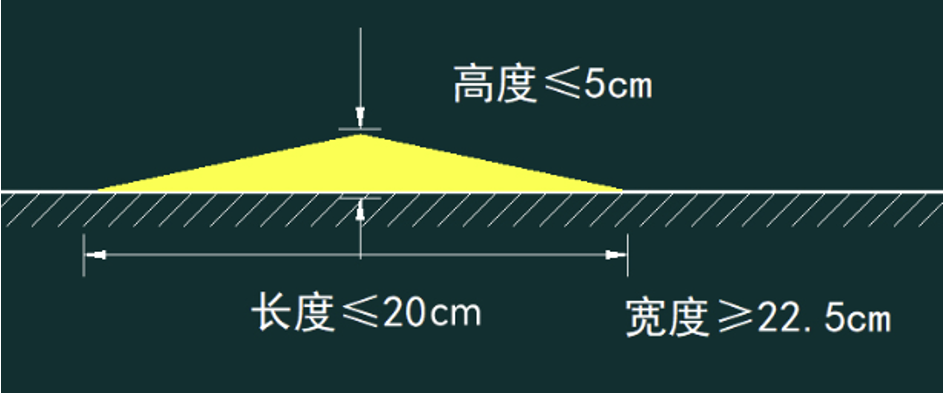
这边我提供一种解决方法。根据规则:单边桥高度小于等于5厘米,长度小于等于20厘米。根据勾股定理可得:

其中:
而另一个轮子的路程仅仅就是l,假设要使两个轮子同时上单边桥,同时下单边桥,小车在平地上的速度是v,则需要给在单边桥上的轮子提供额外速度为:
即: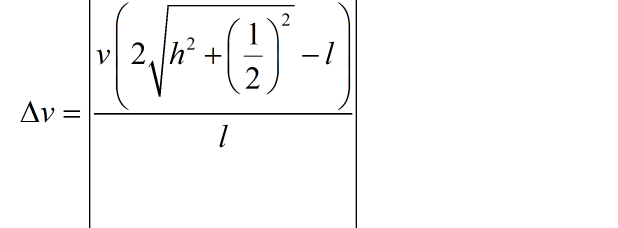
我们就把需要补偿的速度差换成了关于h、v和l的关系。那么h、v和l怎么来呢?其中v是我们设置需要运行的速度。
h可以通过刚刚算的腿高得到,即:

其中:
由于驱动轮相对大地的速度无法直接测得,故通过结合编码器与陀螺仪解算得到。记驱动轮电机编码器测得转子相对定子角速度为 ω_ecd、电机定子固定基座(五连杆从动杆,记作 c 系)相对轮腿车体(记作 b 系)角速度为 (φ_bc ) ̇,由运动学解算得到、轮腿相对大地(记作 e 系)角速度为ω_eb,由固定于陀螺仪测得。根据上述三个角速度,即可求出驱动轮转子相对大地角速度 ω:

假设驱动轮相对水平地面运动为纯滚动,不存在打滑,则驱动轮相对大地平动速度 x ̇ 为:

根据 ,有:

即:

这里的L_0是轮腿车体重心到摆杆的距离。θ是重心和摆杆中心连线与竖直方向的夹角。
由此可积分得到在平地上的距离,即上一章节的l。
此时我们就解决了关于单边桥的复杂问题了。那么我还有点新的想法但是没有理论的分析和实验的检测,在此我浅浅说说我的“有趣”的想法。
既然规则没有规定,那么单边桥能否使用“杂技”的行驶通过,即只用一个轮子驱动,另一条腿抬起,使用我在上一篇浅析里面提到的空中姿态控制器,将轮子当动量轮来保持平衡。如下图所示:
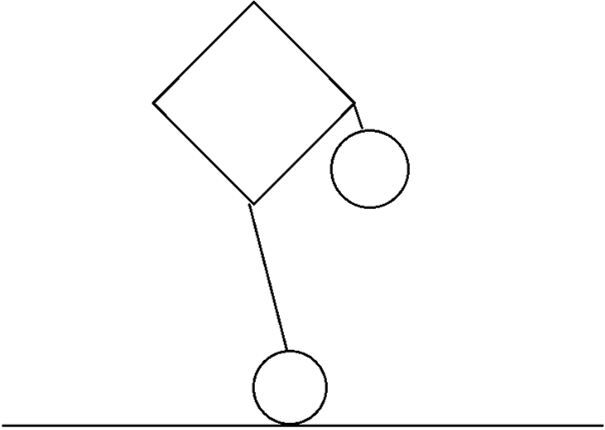
我觉得这非常好玩,并且有实现的可能,请耐心等待我的研究,希望在下一篇浅析中将这种“杂技”与大家见面。
