代码工程的GITHUB连接:
https://github.com/sj15712795029/stm32f1_marvell88w8801_marvell8801_wifi
Marvell自己实现驱动系列文章分为几篇介绍:
每篇更新打开专栏可以看到:
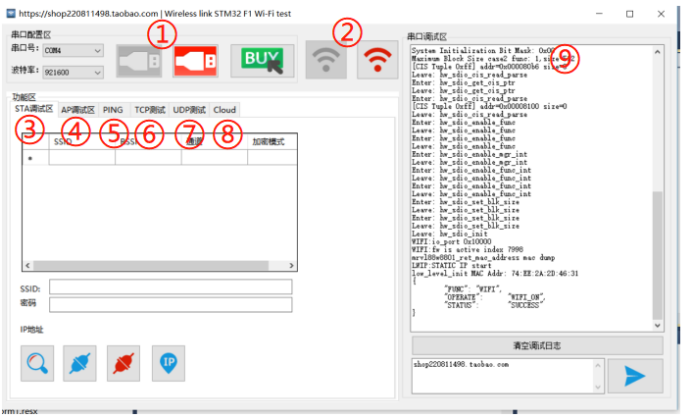
功能如下:
①串口配置区,默认是921600的波特率
②Wi-Fi功能开启区
③STA功能调试区
④AP功能调试区
⑤PING功能调试区
⑥TCP功能调试区
⑦UDP功能调试区
⑧云服务器调试区
⑨Debug日志区
跟PING有关的界面如下: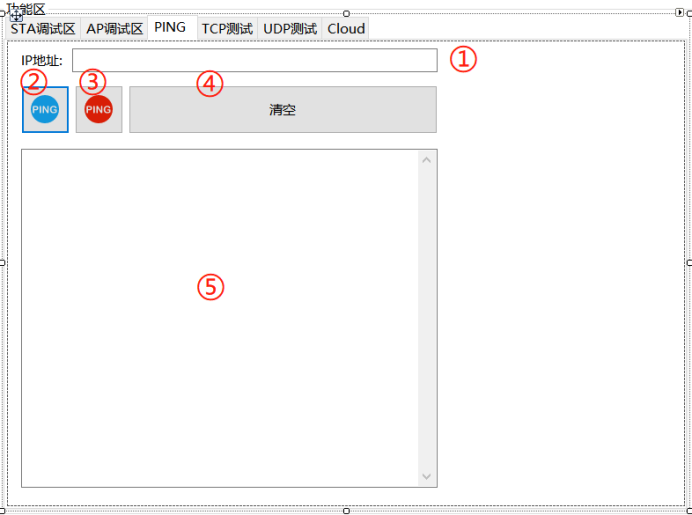
①要PING的IP地址
②开始PING
③停止PING
④清空PING结果
⑤显示PING结果
目前上位机跟开发板是通过串口来通信,通信格式是json,如果你没听过json,那么自行百度,跟WIFI PING相关的json格式分别如下:

上位机用的c# winform,用的json库using Newtonsoft.Json,此库需要Newtonsoft.Json.dll库
发送代码如下:
private void json_construction_send(string func, string operate, string param1, string param2, string param3, string param4, string param5, string param6)
{
json_commmand cmd = new json_commmand();
cmd.FUNC = func;
cmd.OPERATE = operate;
cmd.PARAM1 = param1;
cmd.PARAM2 = param2;
cmd.PARAM3 = param3;
cmd.PARAM4 = param4;
cmd.PARAM5 = param5;
cmd.PARAM6 = param6;
string json_cmd = JsonConvert.SerializeObject(cmd);
#if CONSOLE_DEBUG
Console.WriteLine(json_cmd);
#endif
if (serialPort1.IsOpen)
{
serialPort1.WriteLine(json_cmd);
}
}
其中跟wifi ping相关的operate为:
string operate_wifi_start_ping = "WIFI_PING";
string operate_wifi_stop_ping = "WIFI_STOP_PING";
uint8_t uart_receive_parse(uint8_t *shell_string)
{
uint8_t result = HW_ERR_OK;
cJSON* parse_json = cJSON_Parse((const char *)shell_string);
uint8_t* func_value = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"FUNC"))->valuestring;
uint8_t* operate_value = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"OPERATE"))->valuestring;
uint8_t* para1 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM1"))->valuestring;
uint8_t* para2 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM2"))->valuestring;
uint8_t* para3 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM3"))->valuestring;
uint8_t* para4 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM4"))->valuestring;
uint8_t* para5 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM5"))->valuestring;
if(strcmp((const char *)func_value,"WIFI") == 0)
{
if(hw_strcmp((const char *)operate_value,"WIFI_PING") == 0)
{
HW_DEBUG("UART PARSE DEBUG:operate WIFI_PING\n");
ip4addr_aton((const char *)para1,&ping_ipaddr);
ping_init(&ping_ipaddr,wifi_ping_runing_hook);
operate_stauts_oled_show(func_value,operate_value,"SUCCESS",0,0,0,0,0,0);
goto exit;
}
if(hw_strcmp((const char *)operate_value,"WIFI_STOP_PING") == 0)
{
HW_DEBUG("UART PARSE DEBUG:operate WIFI_STOP_PING\n");
ping_deinit(wifi_ping_stop_hook);
operate_stauts_oled_show(func_value,operate_value,"SUCCESS",0,0,0,0,0,0);
goto exit;
}
}
if(hw_strcmp((const char *)shell_string,"shop220811498.taobao.com") == 0)
HW_DEBUG("welcome to use our stm32f1 camera wifi board\n");
else
HW_DEBUG("UART PARSE ERR:HW_ERR_SHELL_NO_CMD\n");
result = HW_ERR_SHELL_NO_CMD;
exit:
cJSON_Delete(parse_json);
return result;
}
uint8_t uart_send_json(uint8_t *func,uint8_t *operate,uint8_t *status,uint8_t *para1,uint8_t *para2,uint8_t *para3,uint8_t *para4,uint8_t *para5)
{
uint8_t *wifi_status_string;
cJSON *wifi_json_status = cJSON_CreateObject();
cJSON_AddStringToObject(wifi_json_status, "FUNC", (const char*)func);
cJSON_AddStringToObject(wifi_json_status, "OPERATE", (const char*)operate);
cJSON_AddStringToObject(wifi_json_status, "STATUS", (const char*)status);
if(para1)
cJSON_AddStringToObject(wifi_json_status, "PARAM1", (const char*)para1);
if(para2)
cJSON_AddStringToObject(wifi_json_status, "PARAM2", (const char*)para2);
if(para3)
cJSON_AddStringToObject(wifi_json_status, "PARAM3", (const char*)para3);
if(para4)
cJSON_AddStringToObject(wifi_json_status, "PARAM4", (const char*)para4);
if(para5)
cJSON_AddStringToObject(wifi_json_status, "PARAM5", (const char*)para5);
wifi_status_string = (uint8_t *)cJSON_Print(wifi_json_status);
HW_DEBUG("%s\n",wifi_status_string);
cJSON_Delete(wifi_json_status);
free(wifi_status_string);
return 0;
}
private void json_status_recv_parse(json_status status)
{
#if CONSOLE_DEBUG
Console.WriteLine("----------json_status_recv_parse-------------");
Console.WriteLine("json func:" status.FUNC);
Console.WriteLine("json operate:" status.OPERATE);
Console.WriteLine("json status:" status.STATUS);
Console.WriteLine("json param1:" status.PARAM1);
Console.WriteLine("json param2:" status.PARAM2);
Console.WriteLine("json param3:" status.PARAM3);
Console.WriteLine("json param4:" status.PARAM4);
Console.WriteLine("json param5:" status.PARAM5);
Console.WriteLine("----------json_status_recv_parse end--------");
#endif
if (status.FUNC == "WIFI")
{
if (status.OPERATE == "WIFI_PING")
{
if (Convert.ToInt32(status.PARAM2) == 0)
tping_result.AppendText("receive from " status.PARAM1 " time< 1ms" '\r' '\n');
else
tping_result.AppendText("receive from " status.PARAM1 " time=" status.PARAM2 " ms" '\r' '\n');
}
if (status.OPERATE == "WIFI_STOP_PING")
{
Int32 loss_all = 0;
double packet_loss = 0;
if (Convert.ToInt32(status.PARAM2) == 0)
loss_all = 1;
else
packet_loss = (Convert.ToDouble(status.PARAM1) - Convert.ToDouble(status.PARAM2)) / Convert.ToDouble(status.PARAM2);
tping_result.AppendText("" '\r' '\n');
tping_result.AppendText("--- ping statistics ---" '\r' '\n');
tping_result.AppendText(status.PARAM1 " packets transmitted, " status.PARAM2 " received, ");
if(loss_all == 1)
tping_result.AppendText("100%packet loss" '\r' '\n');
else
tping_result.AppendText(packet_loss.ToString() "%packet loss" '\r' '\n');
}
}
}

private void bping_Click(object sender, EventArgs e)
{
if (tping_ip.Text == "")
{
MessageBox.Show("请填入IP地址", "错误提示");
return;
}
json_construction_send(wifi_func, operate_wifi_start_ping, tping_ip.Text, null, null, null, null, null);
}
if(hw_strcmp((const char *)operate_value,"WIFI_PING") == 0)
{
HW_DEBUG("UART PARSE DEBUG:operate WIFI_PING\n");
ip4addr_aton((const char *)para1,&ping_ipaddr);
ping_init(&ping_ipaddr,wifi_ping_runing_hook);
operate_stauts_oled_show(func_value,operate_value,"SUCCESS",0,0,0,0,0,0);
goto exit;
}

private void bping_stop_Click(object sender, EventArgs e)
{
json_construction_send(wifi_func, operate_wifi_stop_ping, null, null, null, null, null, null);
}
if(hw_strcmp((const char *)operate_value,"WIFI_STOP_PING") == 0)
{
HW_DEBUG("UART PARSE DEBUG:operate WIFI_STOP_PING\n");
ping_deinit(wifi_ping_stop_hook);
operate_stauts_oled_show(func_value,operate_value,"SUCCESS",0,0,0,0,0,0);
goto exit;
}
void wifi_ping_stop_hook(uint16_t send_count,uint16_t recv_count)
{
uint8_t send_str[8] = {0};
uint8_t recv_str[8] = {0};
hw_sprintf((char*)send_str,"%d",send_count);
hw_sprintf((char*)recv_str,"%d",recv_count);
uart_send_json("WIFI","WIFI_STOP_PING","SUCCESS",send_str,recv_str,0,0,0);
}
if (status.OPERATE == "WIFI_STOP_PING")
{
Int32 loss_all = 0;
double packet_loss = 0;
if (Convert.ToInt32(status.PARAM2) == 0)
loss_all = 1;
else
packet_loss = (Convert.ToDouble(status.PARAM1) - Convert.ToDouble(status.PARAM2)) / Convert.ToDouble(status.PARAM2);
tping_result.AppendText("" '\r' '\n');
tping_result.AppendText("--- ping statistics ---" '\r' '\n');
tping_result.AppendText(status.PARAM1 " packets transmitted, " status.PARAM2 " received, ");
if(loss_all == 1)
tping_result.AppendText("100%packet loss" '\r' '\n');
else
tping_result.AppendText(packet_loss.ToString() "%packet loss" '\r' '\n');
}
