

多合一集成会带来一些电磁兼容性问题,多合一集成噪声源多,同时受到总成外包络的影响,内部布局紧凑,耦合路径会非常复杂,容易产生辐射发射和传导发射等EMC问题。
(1)高低压耦合问题,可以通过高低压分区隔离及屏蔽、低压线束远离高压噪声区、滤波器优化设计等一些措施去解决。
(2)多干扰源问题。必须从噪声源头去遏制,比如低压源头和高压源头,还有一些软件协作处理,比如说转频的一些软件处理以及采用多阶滤波器增加滤波的带宽。
随着控制器的体积、重量的增加,改变了整个系统模态,系统传递路径会发生比较大的变化,NVH会受到很多的挑战:
(1)平板模态辐射大。
问题:多合一控制器外壳体的大平面,增加了辐射噪声的风险。
解决措施:阻尼铝板,声学包裹,或者通过结构壳体的加强筋去进行一些处理。
(2)多功能集成带来NVH优化效果差。
控制器集成的功能越多,控制越复杂,电机电磁噪声风险越大,主要是要合理控制集成功能,通过一些软件的算法,比如说谐波注入、偏磁电流的补偿进行一些NVH的优化。
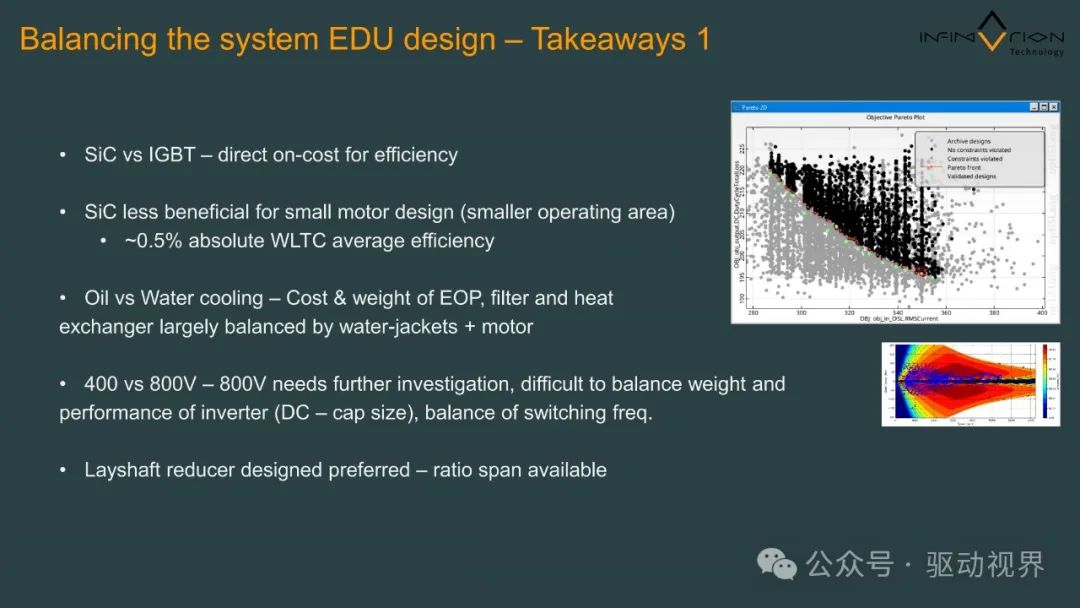
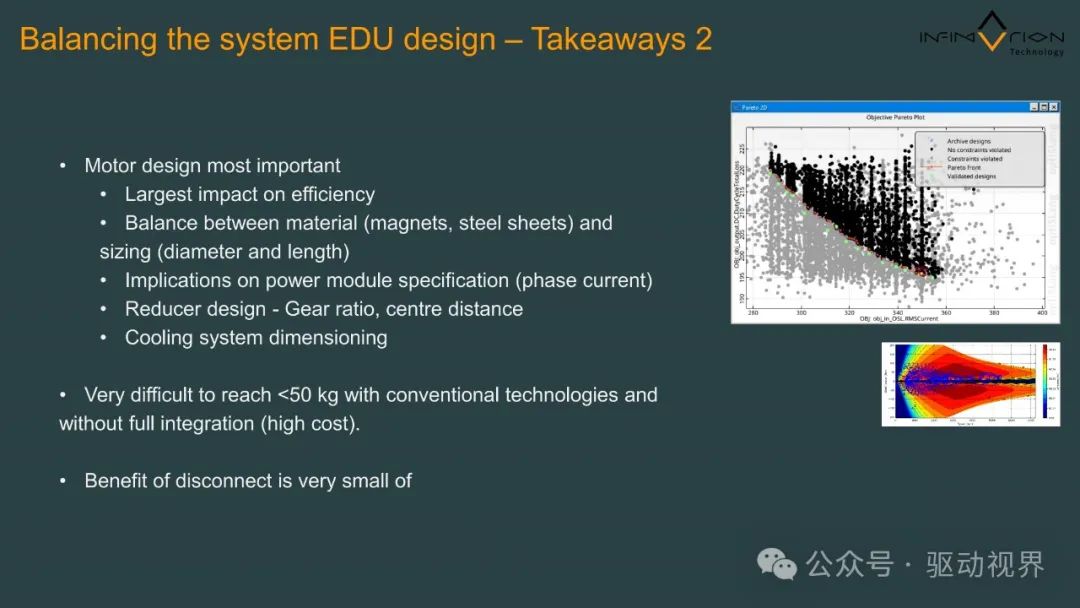
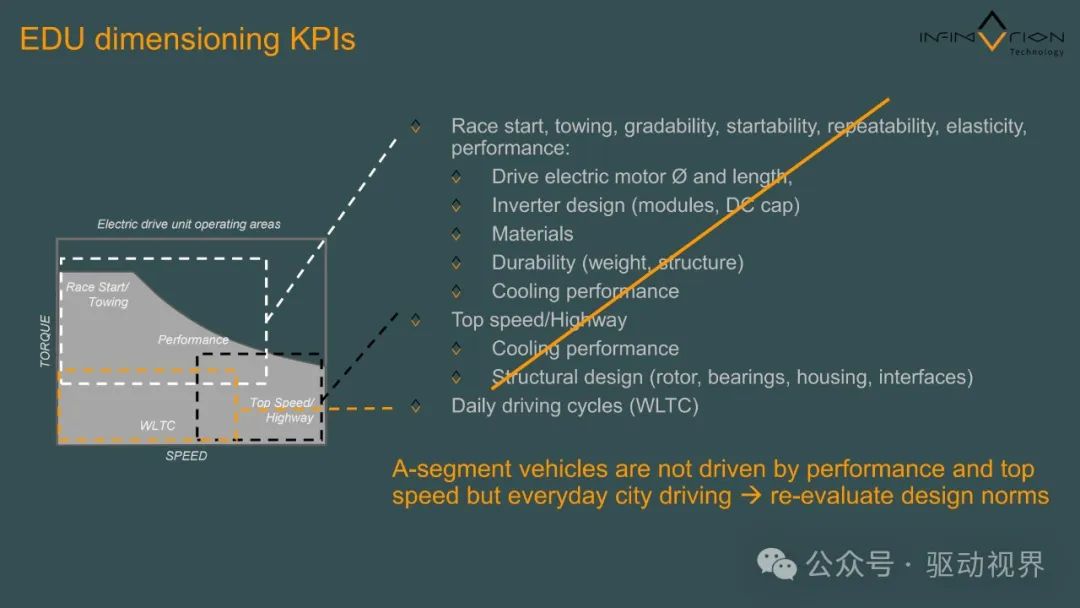
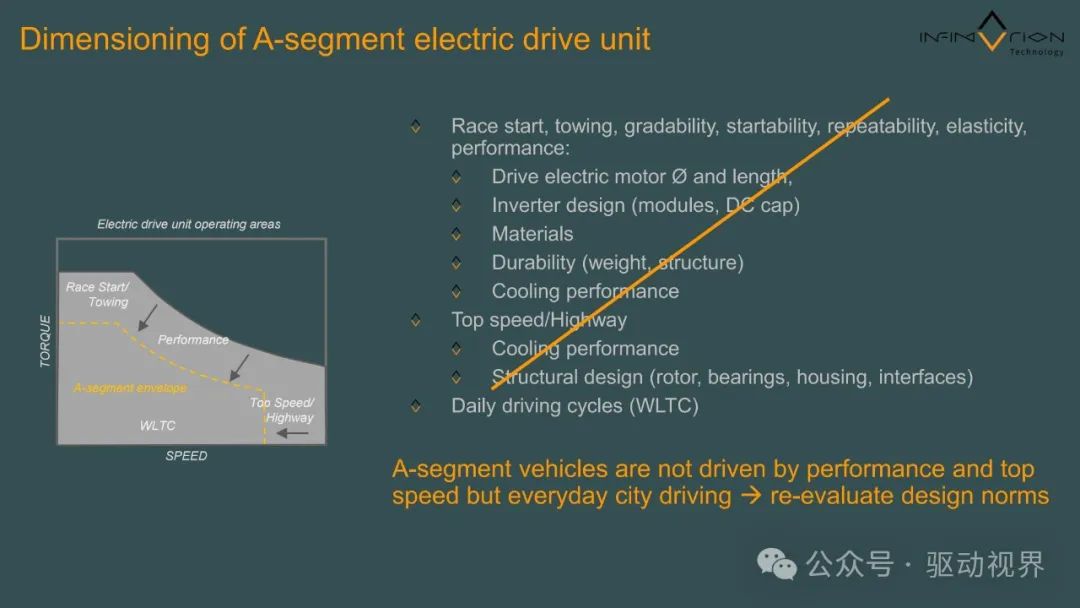
电机设计最重要:
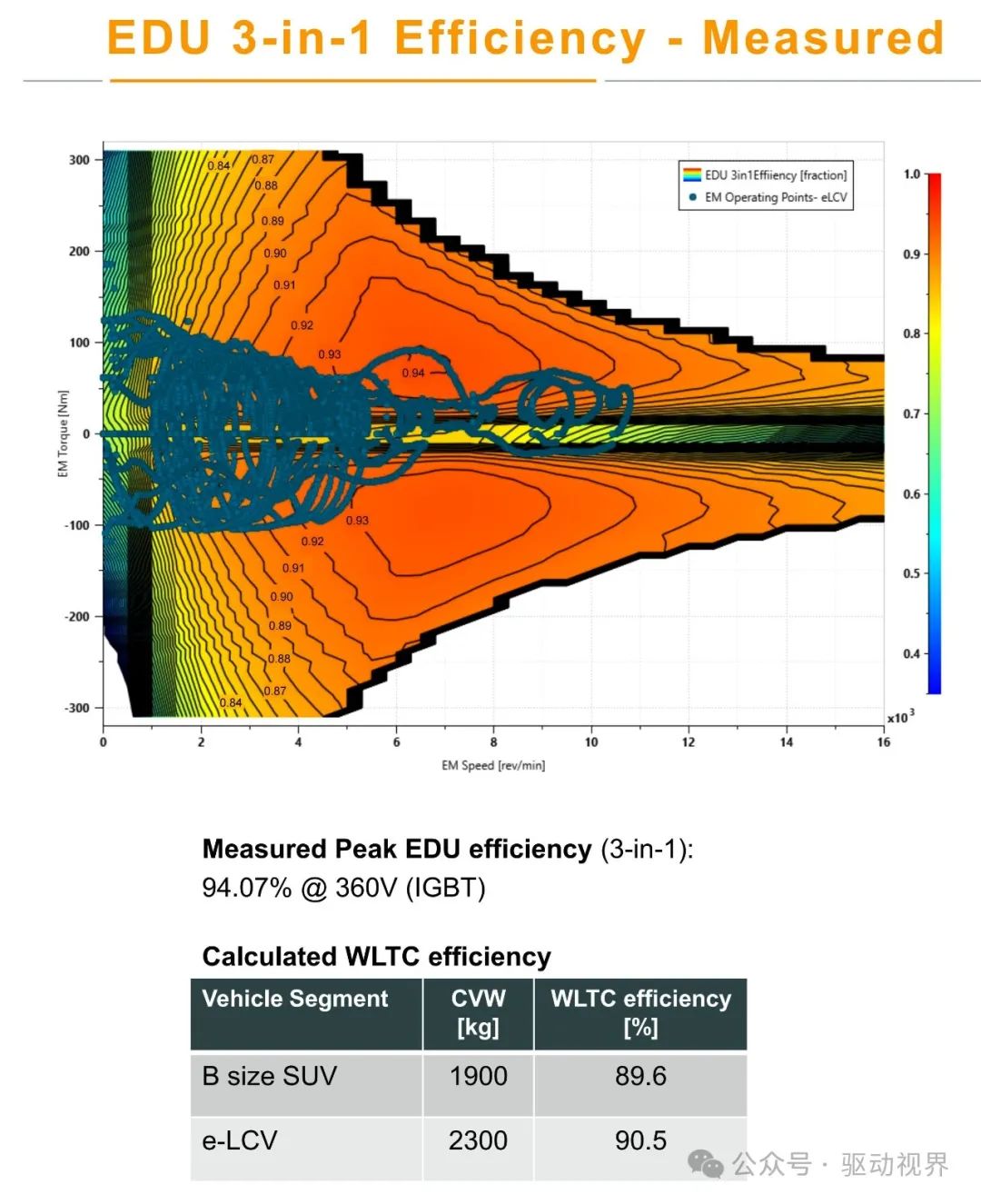
对效率影响最大
材料(磁铁、硅钢)和尺寸(直径和长度)之间的平衡
对功率模块规格(相电流)的影响
减速器设计传动比、中心距
冷却系统尺寸
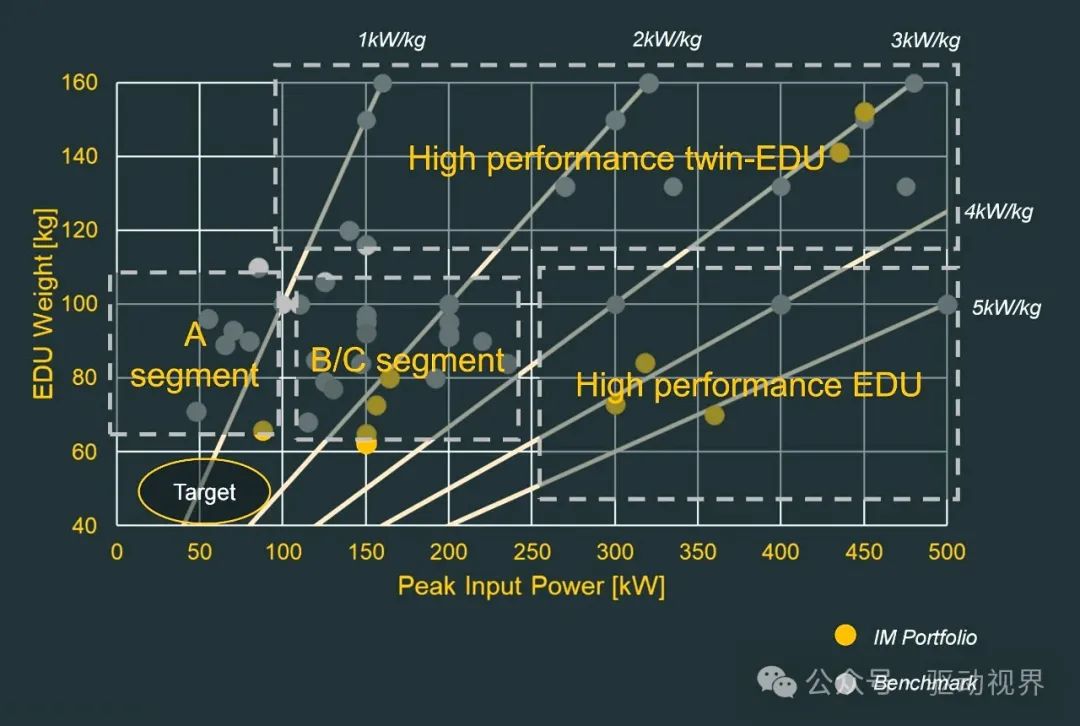
如果没有完全集成,使用传统技术很难达到<50kg(成本高)
断开连接的好处很小

(1)客户期望软件定义车辆快速上市:许多功能对所有BEV都是一样的,如OBC、DCDC、MCU、BMS等。
(2)主机厂必须决定为其整车选择自己制造还是购买EDU(电驱动总成):
①如何覆盖尽可能多的应用场景?
②如何优化整车集成和成本?
③如何在不进行大量开发和生产投资的情况下跟随技术发展趋势
(3)解决这一挑战的潜在方法:
①完全垂直整合内部--由市场领导者完成;需要很长时间和大量的重复投资+车辆整合仍有待解决
②构建一些组件并购买其他组件--有效!节省下集成和一些投资;系统效率和软件更新怎么办?
③购买已经集成的X-in-1 EDU,速度快、投资低;依赖于一个供应商成为一个有吸引力的解决方案
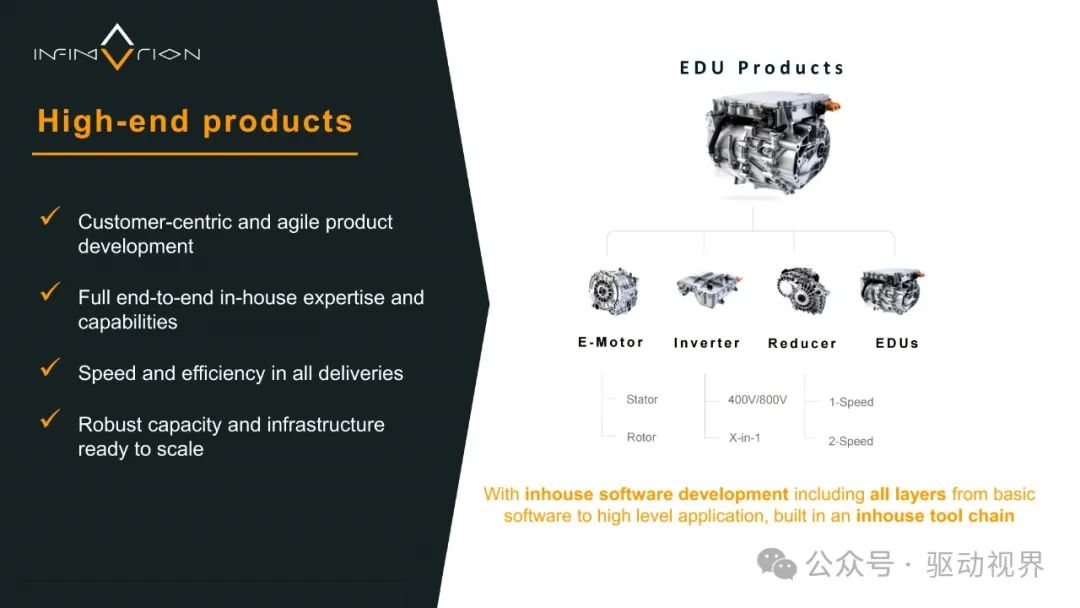
促进因素 -Xin1 集成
理念:扩展传统EDU系统的范围,以集成各种车辆子系统
多合一集成能够:
硬件和软件的纵向整合,用于集成黑盒硬件和软件
不再使用多ECU车辆系统,而是将应用程序集成到MCU中并删除冗余ECU核心,应用程序的大小通常占MCU容量的25%以下
在集成Xin1时,应用负载和时序是需要考虑的重要变量
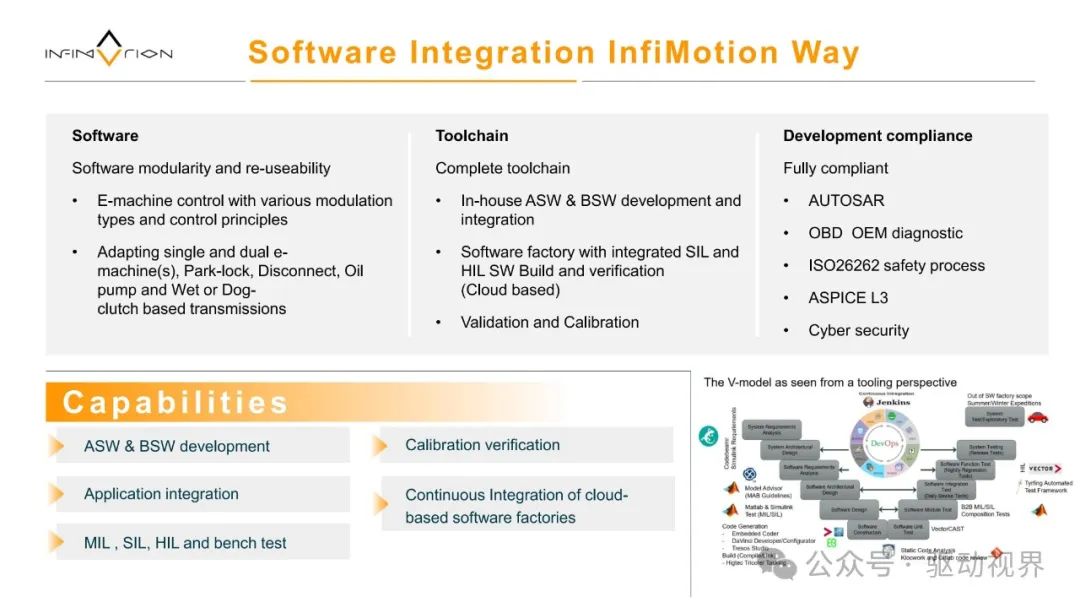
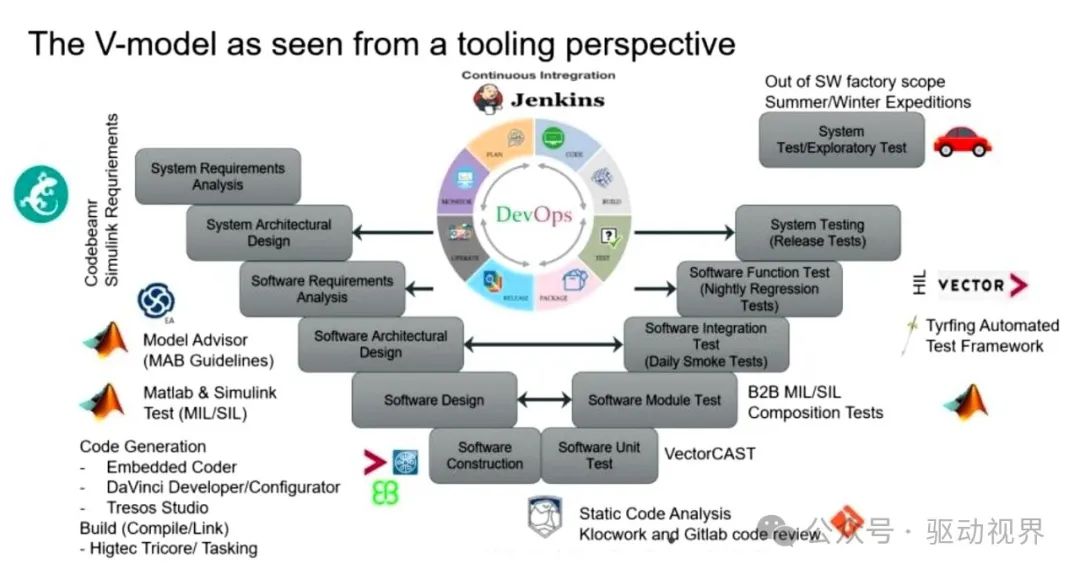
持续集成软件工厂可实现软件组件(白盒或黑盒)的快速集成
多合一集成如果没有一个成熟的团队,不和整车密切联动,多专业跨领域的控制集成,非垂直一体化的自研,企业是很难实现的。

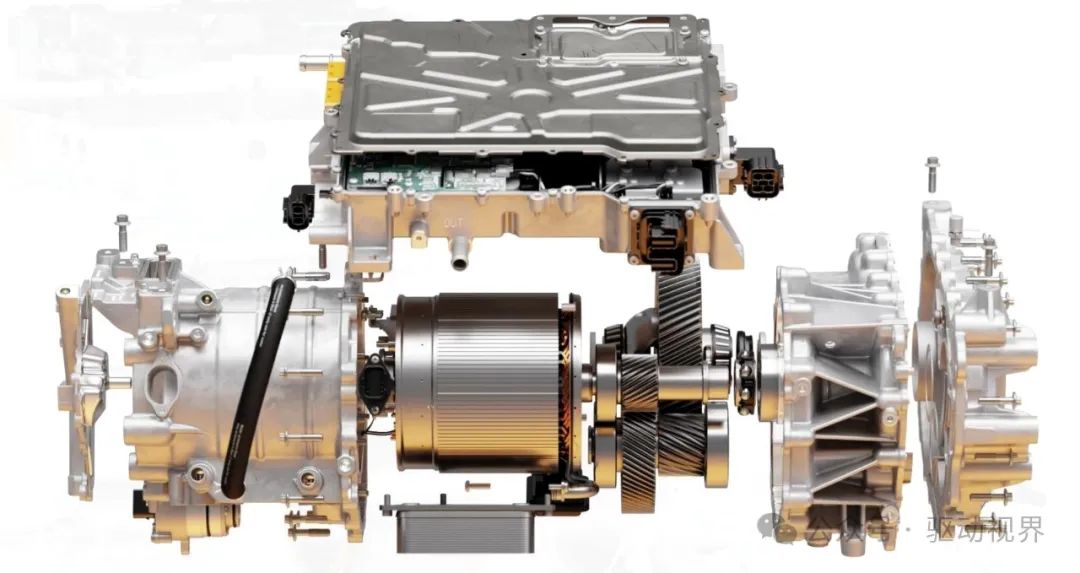
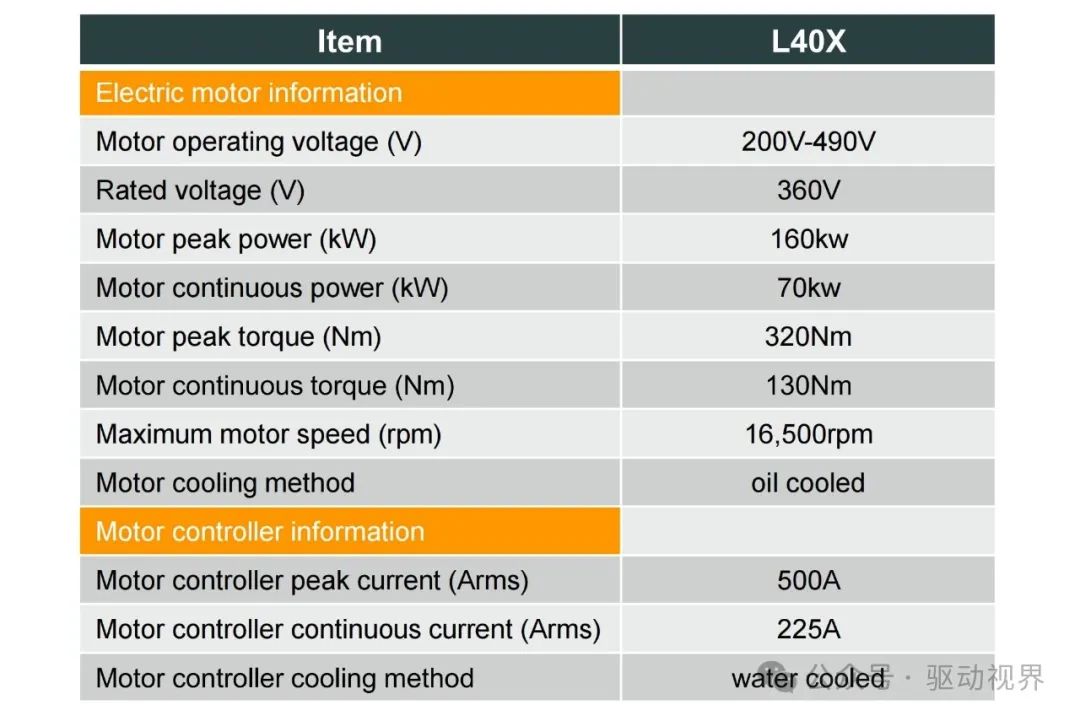
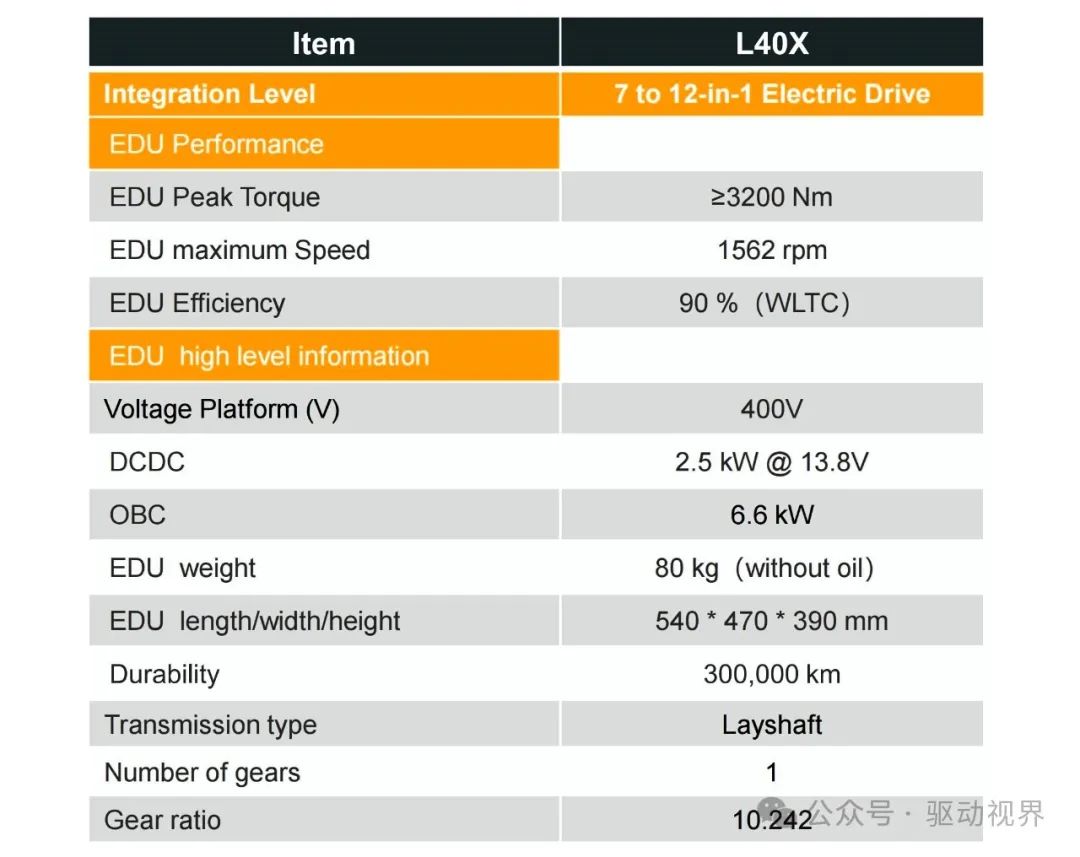
星驱L40X*-X-in-1平台
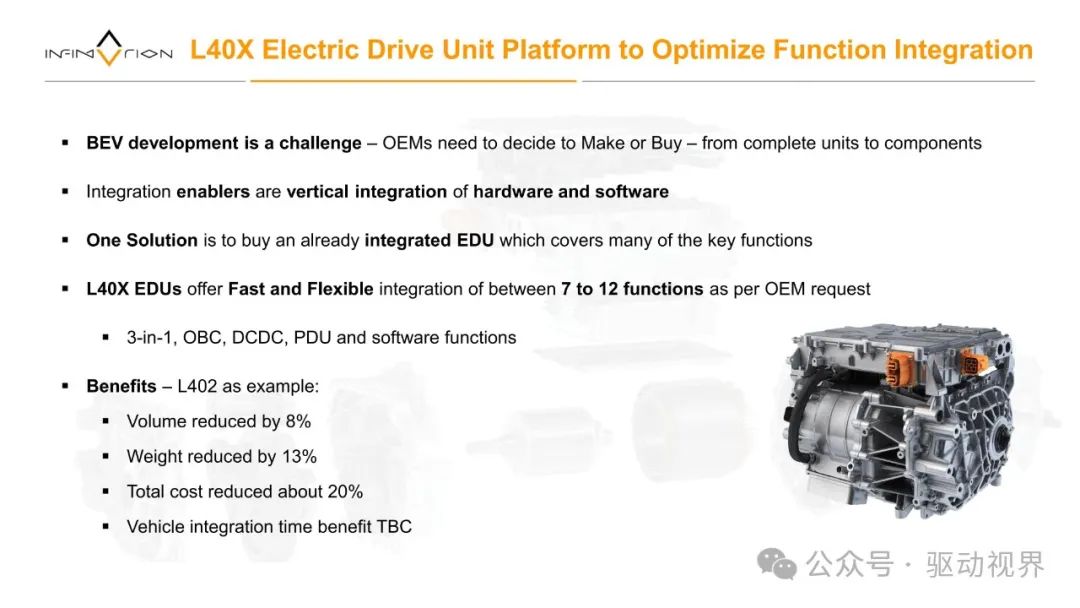
(1)将硬件功能集成到EDU中,如PDU、OBC和DCDC,可以减少外壳、电缆和连接器,并简化热管理系统
(2)将软件功能集成到MCU中,可以更有效地使用控制器
(3)与之前的设计相比,有显著的好处:
总空间节省约5升,节省8%
总重量减轻约3公斤,节省13%,
总成本降低约20%
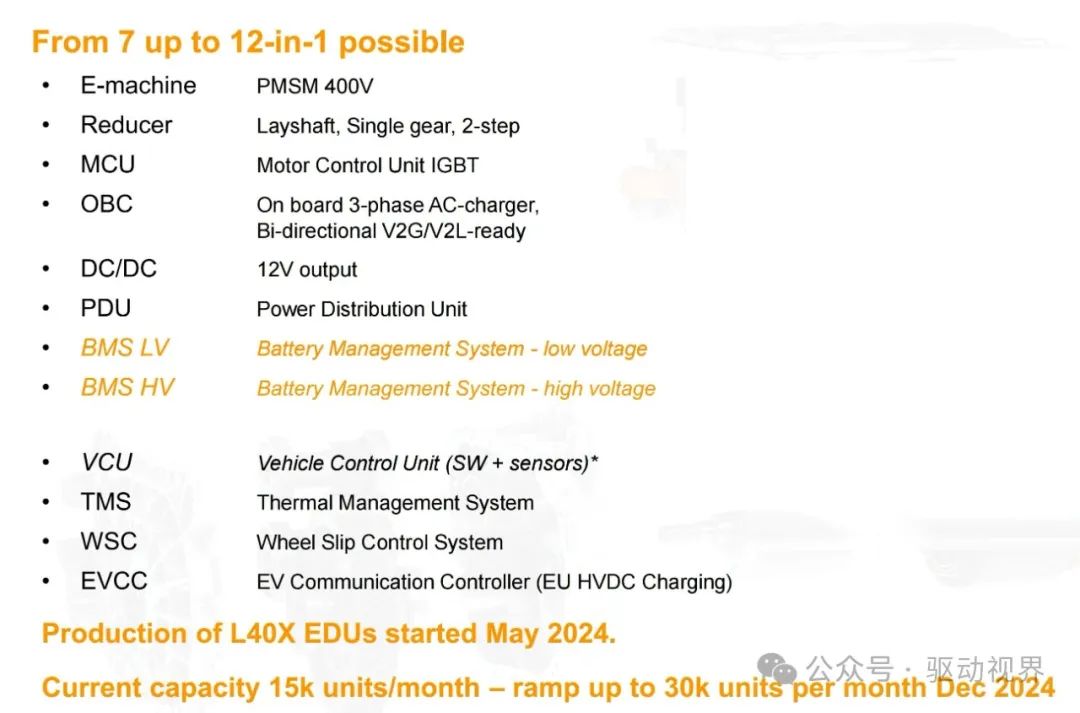
从7合1到12合1
扫描二维码|关注我们 ● 电动车千人会 ● | 扫码关注智能汽车 ● EVH1000智能汽车 ● |
欢迎加入新能源汽车产业交流群
关注公众号后台回复关键词“社群”
即可获取入群方式


