

触觉在我们直接感知周围物体方面发挥着重要作用。例如,我们用触觉来判断物体是重还是轻,或者是桌子、塑料还是木头材质等。这种感知对于人类完成日常任务至关重要,例如举起酒杯,插拔充电线缆等。目前开发出的触觉传感器采用了多种不同的传感方式,例如电阻式、电容式、光阻式、铁电式或摩擦电式等。每种技术通常都组装成网格状,以覆盖所需要的传感区域。一般来说,为了优化触觉传感分辨率,最好采用高密度、占位面积较小的网格,每个传感元件都用细线连接,以记录电信号。然而,这种设置通常会受到机械应变、电磁噪声和单元间串扰等影响。新开发的制造技术以及深度学习技术的应用,可以减少其中一些问题的影响。然而,迄今的研究证明这些技术很难在机器人设计和扩展中实现进一步突破。
高分辨率触觉传感为机器人技术带来了巨大优势,可以实现灵巧操作、物体和纹理识别、材料表征以及物体姿态估计等功能。最流行的高分辨率触觉传感器被称为“基于摄像头”或“基于视觉”的触觉传感器(VBTS)。利用位于传感器内的小型摄像头透过透明弹性体观测不透明的外膜(即“皮肤”)。外膜在被触摸时会发生变形,摄像头会记录变形的过程。在这些传感器中,GelSight传感器应用最为广泛,它们利用了光以不同角度照射薄膜时产生的阴影图像。多种颜色的光从不同方向照射薄膜,应用光度立体算法可以将阴影信号转换成3D深度图。
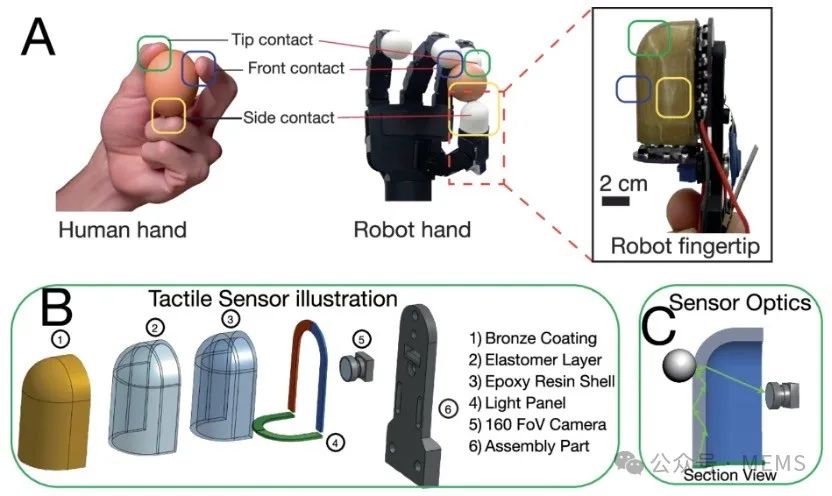
(A)人手和带有触觉传感器的机器人手操纵鸡蛋,最右侧图为指尖GelSight传感器的放大图;(B)指尖触觉传感器及重要光学元件的剖视图;(C)传感器内部的光路图。
GelSight传感器的性能主要取决于内部照明模式,而内部照明模式在不同的接触几何形状下存在差异。要预测传感器将机械信号(变形)转换为光学信号(图像)的模式,需要了解器件内部的完整光场,即所有位置、所有方向、所有颜色的光分布。这使问题变得相当复杂,因为良好的照明系统涉及来自表面的多次反射,而这些表面可能具有各自复杂的光学特性,光学元件的特性或几何形状的微小变化都可能对传感器的精度产生明显影响。此外,机器人指尖的空间有限,紧凑地排列光学元件非常困难,这通常意味着无法获得完美的设计,而只能通过权衡实现相对较优的设计。目前的设计主要是通过反复试验开发出来的。由于缺乏良好的仿真,这一过程费时费力又容易出错。要在机器人中应用这些触觉传感器,对仿真的需求日益重要。只有通过仿真才能满足机器学习对数据的需求。因此,无论是传感器设计还是在机器人中部署传感器,都需要精确的仿真。
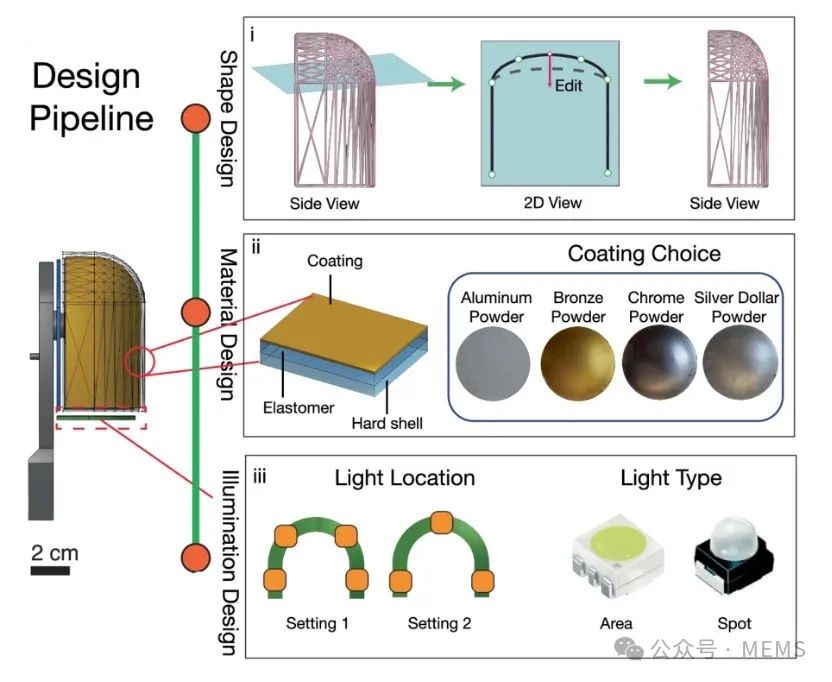
触觉传感器设计流程,从传感器形状生成开始,采用低维曲线参数化、传感器材料属性选择和照明系统设计,以程序化方式进行新设计。
据麦姆斯咨询介绍,美国伊利诺伊大学厄巴纳-香槟分校、麻省理工学院和卡内基梅隆大学的研究人员为机器人设计GelSight传感器探索了一种更好的方法,为设计过程引入了一种包含通用光学仿真工具的系统框架。研究人员提出利用计算工具执行设计流程,生成虚拟设计,应用光学仿真生成触觉图像,并通过目标函数评估性能。这种设计流程可以连接面向自动设计的优化算法。凭借新的框架,可以轻松地将传感器设计过程从数月缩短到几周。
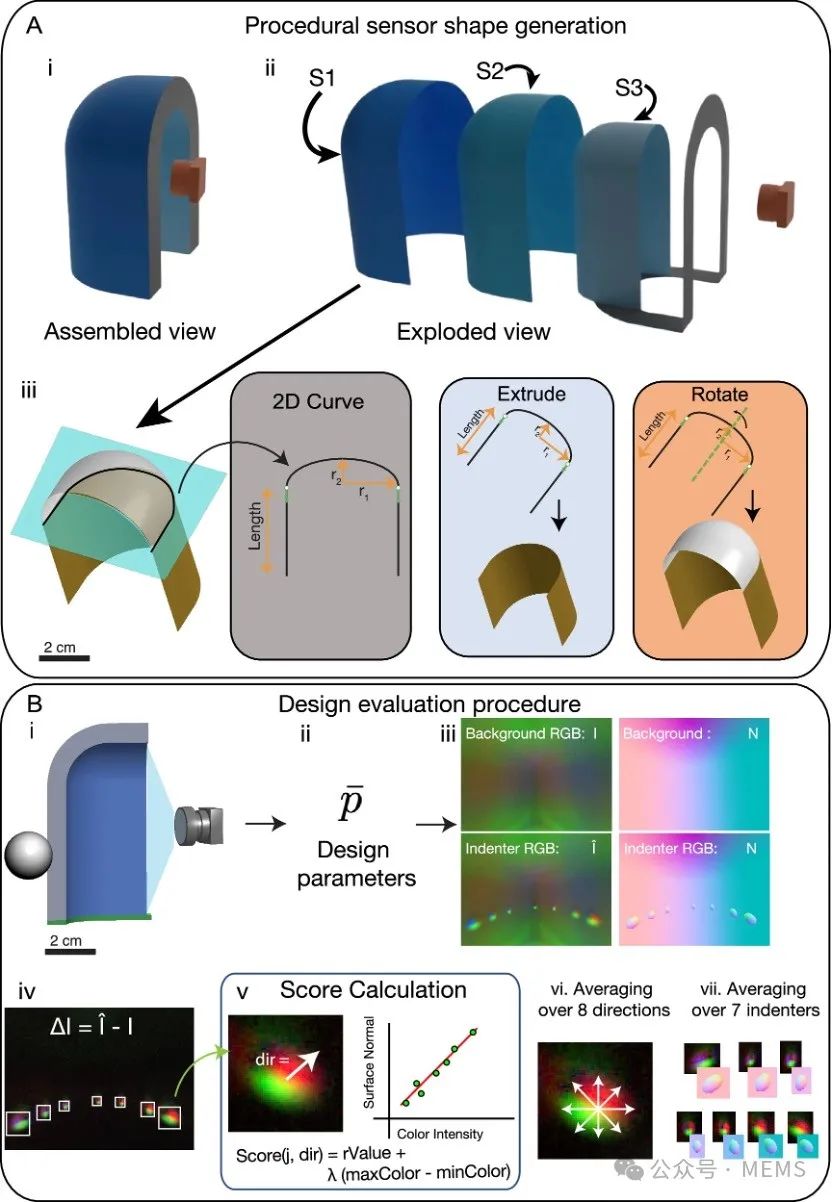
程序化传感器生成和设计评估框架
研究人员提出了一种利用光学仿真进行基于视觉的触觉传感器(VBTS)设计的框架。该框架利用低维曲线参数化实现了曲面触觉传感器的自动化生成,并利用新颖的RGB2Normal目标函数对传感器设计进行排序。
该框架实现了在仿真中迭代指尖传感器的设计。在3D表面重建方面,研究人员比较了仿真和实际实验中的人类专家设计和框架优化设计。通过利用新颖的目标函数和设计框架对关键传感器的设计空间进行了探索。参数空间探索能够确定设计VBTS的关键原则。此外,该研究还展示了曲面触觉传感器的两种机器人应用:机器人抓取和表面检测。研究人员突出展示了曲面触觉传感表面的优势,并表明在机器人表面检测方面,该框架优化的传感器设计明显优于人类专家的设计。
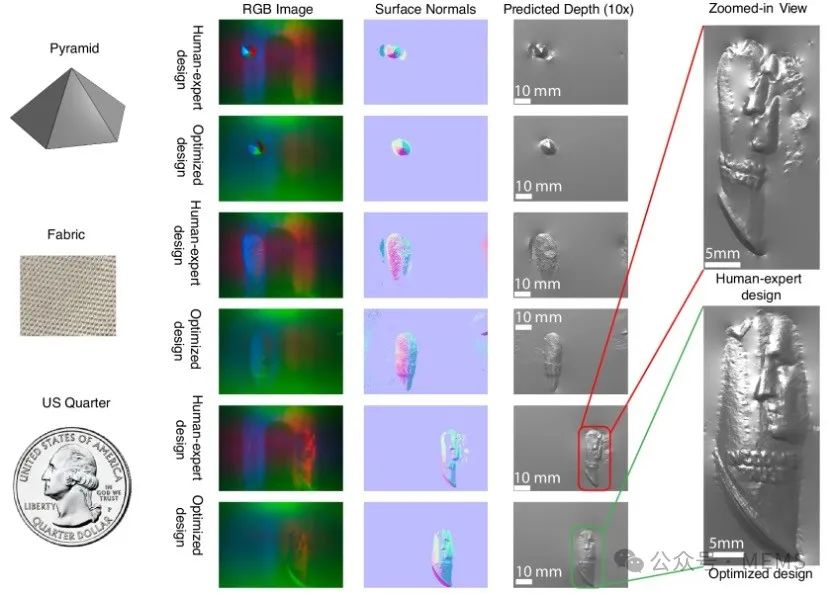
人类专家设计和优化传感器设计的定性结果
研究人员将这种传感器设计流程应用于GelSight传感器的圆形指尖设计,这种设计非常适合灵巧的机器人手。传感器的圆形限制使得光学系统的设计更具挑战性,因为,照明系统需要均匀地照亮较大的曲面,并在不同的表面法线上产生良好的反射。研究人员用了参考文献中提出的传感器初始化设计程序,使用波导板均匀地引导整个传感器曲面上的光线。然而,光学系统的质量对传感器几何形状、光的选择和反射材料的细微变化非常敏感。为了探索这些设计因素的影响,研究人员使用基于物理的渲染(PBR)技术对传感器进行了仿真。PBR是一种模拟真实世界中光与物体表面相互作用的渲染技术。PBR通过物理原理来计算光照和材质的反应,使得渲染结果更加逼真和一致。PBR已被用于设计光机械和光声器件。
基于视觉的触觉传感器(VBTS)设计框架的通用性
该研究提出的的VBTS数字设计框架由三个关键部分组成:完全通用的开源光学仿真框架;用于程序化可控传感器设计的低维曲线参数化;以及传感器设计评估程序。研究人员精心选择了一个开源工具来创建光学仿真框架,以便于访问和轻松添加新的光学元件。由于其仿真是基于物理的渲染,因此可用于仿真任何VBTS传感器并生成物理逼真的触觉图像,而无需收集大量的传感器特定数据。这种仿真可用于协同设计机器人结构和光学系统。
该框架能够通过计算技术设计出各种新型VBTS和光学器件,支持新用户为其特定的机器人应用开发VBTS。其仿真框架基于开源工具,允许纳入新的光学元件并扩展框架,以考虑各种新型照明系统,例如用于照明系统的荧光涂料。
本文所提出的仿真框架依赖于光和涂层材料的精确模型。研究人员利用在计算机图形学领域提出的低维物理模型开发了捕捉光和涂层材料特性的技术。如果要加入更具挑战性的照明设置,用户可能需要使用更复杂的技术。所提出的目标函数基于创建颜色和表面法线之间的映射,因为该研究的主要目标是为机器人应用恢复表面法线。不过,在设计触觉传感器时,法向力或剪切力等其他量也是有用的特性。通过考量颜色与力之间的关系,很容易扩展解释这些特征。不过,如何评估用于特定机器人应用的VBTS仍然是一个有待解决的问题。研究人员相信这项工作使设计过程可量化,并为未来的VBTS研究提供了一种数据驱动的新方法。
总而言之,本研究提出了首个计算设计框架,可自动生成传感器、评估设计并优化VBTS。研究人员展示了该设计框架对VBTS设计的实用性。更广泛地说,研究人员希望在计算机图形学(基于物理的渲染和仿真)、光学(光学透镜和材料设计)和机器人学等不同领域之间搭建一座桥梁,推动这些领域内部或之间的新研究。
论文链接:
https://doi.org/10.1038/s44172-025-00350-4
延伸阅读:
《触觉技术及市场-2024版》
《机器人传感器技术及市场-2022版》



