

点击蓝字 关注我们
SUBSCRIBE to US
NASA/Justin Yim
自从2016年我们首次知晓Salto机器人(它是加州大学伯克利分校Ron Fearing实验室的一个项目)以来,它就一直是我们最喜欢的机器人之一(https://spectrum.ieee.org/uc-berkeley-salto-is-the-most-agile-jumping-robot-ever)。这个手掌大小、装有弹簧的跳跃机器人已经从勉强能够连续进行几次开环跳跃,发展到掌握着陆技巧、能在户外四处弹跳、顺利通过障碍赛道,偶尔也会(因故障)爆炸。
Salto非常特别的一点在于,它仍然是一个活跃的研究项目——对于任何机器人来说,九年都是相当长的寿命了,尤其是对于一个没有任何直接明显实际应用的机器人而言。但是Salto的最初创造者之一Justin Yim,他现在是伊利诺伊大学的一名教授,发现了一个独特的应用场景,在这个场景中Salto或许能够做到其他机器人无法做到的事情:对从土星卫星土卫二(Enceladus)冰冷表面喷射出的间歇泉中的水进行空中采样。
土卫二(Enceladus)之所以如此有趣,是因为它完全被一层40千米厚的冰层所覆盖,而在冰层之下是一个10千米深的全球性海洋。在那个海洋里有什么,我们还不得而知。在某个时刻机器人或许能够解决潜入这个被掩埋的海洋的问题,但在较近的时期内,土卫二的南极有一百多座冰火山,它们将水蒸气和各种各样的其他物质喷射到太空中,这为任何能够足够靠近(以便采集样本)的机器人提供了一个采样机会(https://www.jpl.nasa.gov/robotics-at-jpl/eels/)。
“We can cover large distances, we can get over obstacles, we don’t require an atmosphere, and we don’t pollute anything.”
—Justin Yim, University of Illinois
Yim与另一位Salto项目的资深成员Ethan Schaler,现就职于JPL,已经获得了美国国家航空航天局Innovative Advanced Concepts计划的资助,用于将Salto改造成一个能够执行Legged Exploration Across the Plume任务的机器人,或者用一个只是略微牵强的首字母缩写词来说,就是LEAP。LEAP将是Salto的太空版,经过几项重大改装,使其能够在寒冷、无空气、低重力的环境中运行。
探索土卫二(Enceladus)充满挑战的地形
根据Cassini飞掠期间拍摄的图像,我们所能了解到的情况是,土卫二的表面对传统的漫游车并不友好,地表布满了山脊和裂隙,不过我们对该地况的确切特性并没有太多了解。那里也基本没有大气层,这意味着你无法利用空气动力学飞行,而如果你改为使用火箭飞行,就会面临尾气污染所采集样本的风险。
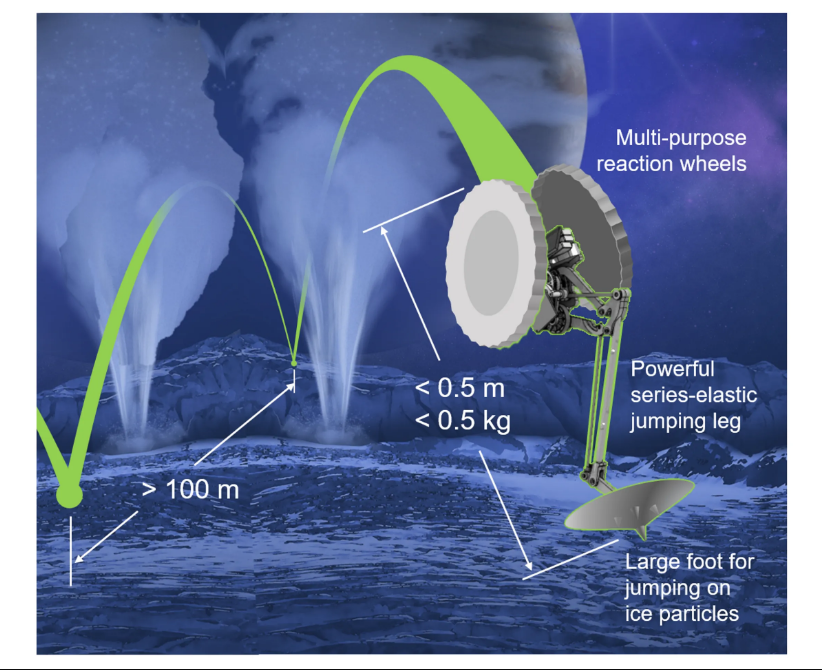
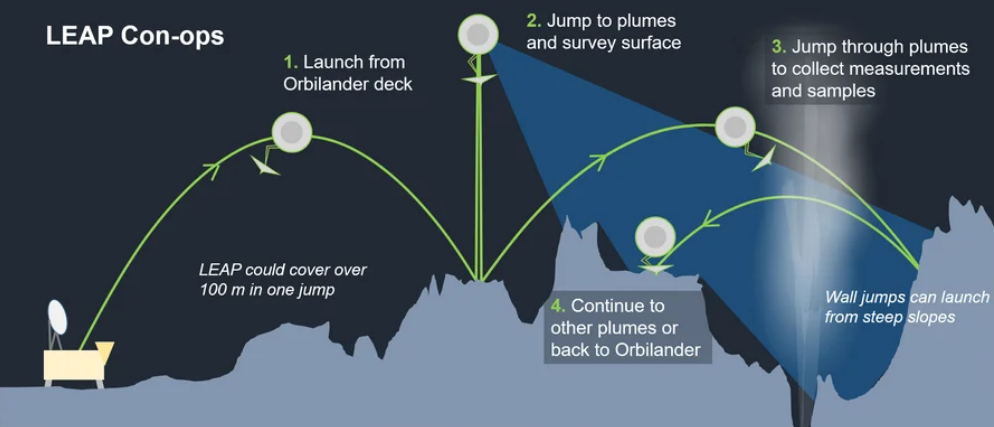
“这让我们没有太多的移动方式可供选择,但跳跃似乎是一种特别合适的方式,”Yim告诉我们。“我们可以跨越很长的距离,可以越过障碍物,不需要大气层,也不会污染任何东西。”由于土卫二的重力仅为地球重力的1/80,Salto在地球上一米高的跳跃距离,能让它在土卫二上飞行约一百米左右,在它穿越冰火山羽流时采集样本。
当前版本的Salto确实需要大气层,因为它使用一对螺旋桨作为小型推进器来控制偏航和翻滚。在LEAP项目中,这些推进器将被一对成角度的反作用轮所取代。为了应对这种地形,该机器人可能还需要一只能够在由颗粒状冰粒构成的表面上起跳和着陆的脚。
NASA/Justin Yim
虽然LEAP项目的设想是让机器人持续跳跃,以一系列可控的跳跃动作在地表弹跳并穿越羽流,但它迟早会有一次糟糕的着陆,机器人必须为此做好准备。“我认为最大的新技术发展之一将是多模式运动,”Yim解释道。“具体来说,我们希望拥有强大的应对摔倒的能力。”反作用轮在这方面能以两种方式提供帮助:它们像机器人周围的外壳一样起到一定的保护作用,而且还能像普通的轮子一样运转,让机器人能在地面上稍微滚动一下。“通过我们现在正在试验的一些操作,反作用轮或许还能够帮助机器人重新直立起来,这样它在摔倒后就可以再次开始跳跃,”Yim说。
像这样的美国国家航空航天局NIAC项目,就LEAP项目这类事物而言,还处于非常早期的阶段,而且从几乎任何衡量标准(空间、时间、资金、政策,凡是你能想到的)来看,土卫二(Enceladus)探测任务都还非常遥远。从长远来看,LEAP项目的设想是,它可以作为一个名为“土卫二轨道着陆器(Enceladus Orbilander)”的任务概念的附加项目。这艘造价25亿美元的航天器将于21世纪30年代的某个时间发射,花费大约12年的时间抵达土星并进入环绕土卫二的轨道。在轨道运行1.5年后,该航天器将着陆于土卫二表面,并再花费2年时间寻找生物特征。Yim解释说,轨道着陆器本身是静止的,“所以拥有这种机器人移动解决方案将是对土卫二进行扩展探索的好方法,可以实现长距离覆盖,从土卫二表面不同区域的羽流中采集水样。”
LEAP项目已通过一项为期九个月的一期研究获得资助,该研究将于25年4月开始。当JPL的团队研究冰面与足部的相互作用并试图找出防止机器人被冻坏的方法时,Yim将在伊利诺伊大学为Salto升级自动扶正能力。老实说,想到这么多年后,Salto可能终于找到了一个应用场景,能为解决低重力环境下科学探测中的移动性这一特殊问题提供实际的最佳解决方案,这是很令人兴奋的。

微信号|IEEE电气电子工程师学会
新浪微博|IEEE中国
Bilibili | IEEE中国
· IEEE电气电子工程师学会 ·
往
期
推
荐
博通创始人HENRY Samuelli获得2025年度IEEE荣誉勋章,该奖项是全球最负盛名的技术奖项之一
检查大坝:卫星和无人机如何帮助避免灾难
干旱监测:新兴技术为农业播种希望
论文摘要 | IEEE研究突破,数学解法助力光子晶体激光器创新
