今日光电
有人说,20世纪是电的世纪,21世纪是光的世纪;知光解电,再小的个体都可以被赋能。追光逐电,光引未来...欢迎来到今日光电!
----追光逐电 光引未来----
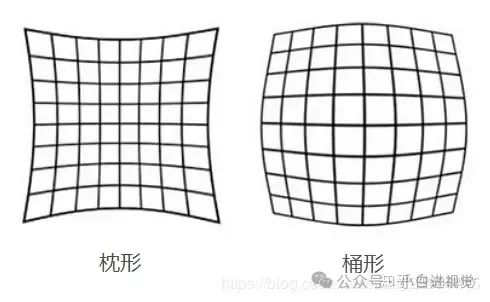
相机畸变主要分为两种,径向畸变与切向畸变。
(1)径向畸变(枕形、桶形):光线在远离透镜中心的地方比靠近中心的地方更加弯曲。
切向畸变:透镜不完全平行于图像平面,即sensor装配时与镜头间的角度不准。
本文主要谈谈径向畸变模型以及深度相机畸变模型。
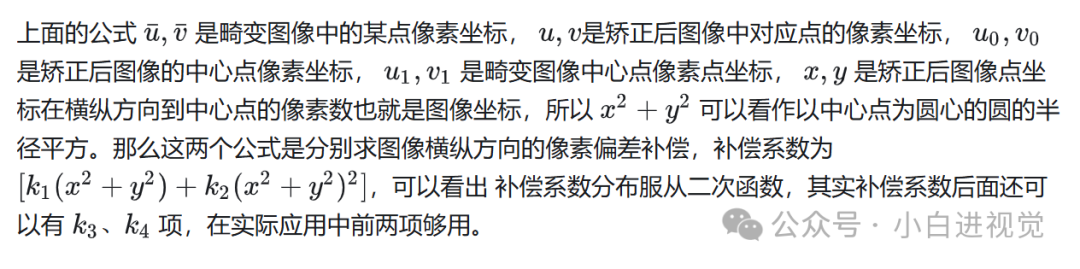
很多资料都介绍了径向畸变模型,很多都是上来就是模型公式:
不懂的人看了真是不知所云,为什么畸变模型是这样的,而不是那样的,本文我将用自己理解的方式介绍一下径向畸变模型的具体内容。
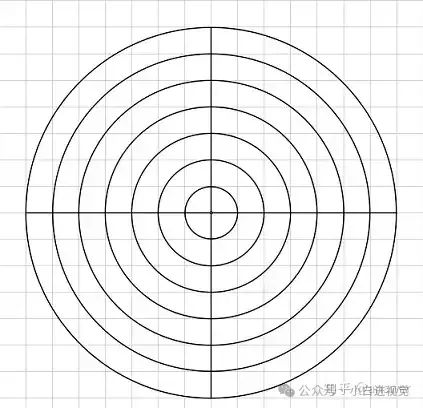
对于该畸变模型我的理解是以图像中心点为圆心相同半径的点补偿量相同,不同半径的补偿量有服从二次函数。如图所示相同半径的圆周上补偿量相同。
所以畸变模型可以写成上面的公式。这里再做一个简单的拓展,如果畸变分布不是一个圆而是其他形状例如是一个椭圆,那么补偿系数
[k1(x2+y2)+k2(x2+y2)2]
中坐标x,y 又服从椭圆分布。具体形式我没有仔细推导并验证。x
深度相机畸变有两种,第一种是与RGB相机相同的畸变,如上面介绍的畸变一样,矫正的是二维平面的畸变,矫正方法可以使用棋盘格,为了清楚观察检测到棋盘格角点,使用深度相机采集的红外激光图像,红外激光图与深度图是相匹配的,例如微软的kinectv2相机采集的红外图与深度图。第二种畸变是深度畸变,如果使用深度相机在一个平面上采集图像,理论上深度图像每一个像素值大小都相等,采集的是一个平面,深度图的像素值大小代表深度。但实际采集的深度图不平整。深度图边缘畸变较大,生成点云如下图所示。
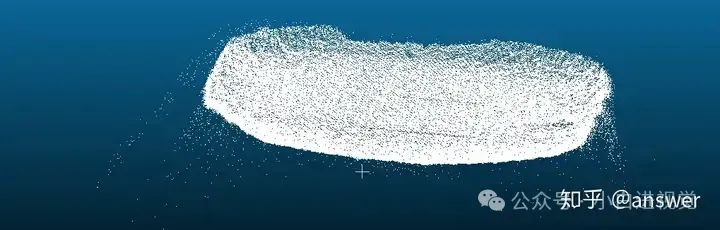
形状像一个碗。
该矫正方法首先认定深度图相机中心位置的像素是无畸变的,那么取相机中心位置的像素值作为畸变矫正的标准值,深度图其他位置的像素值(周围像素的中值)与标准值做差,将差值存储在一张表中,那么在矫正其他图像时,这张表中的值作为补偿量进行补偿。该方法需要矫正时相机到标定平面的距离与实际相机的工作距离相同或接近。
文章出自:https://zhuanlan.zhihu.com/p/94445955
申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----
【说明】欢迎企业和个人洽谈合作,投稿发文。欢迎联系我们诚招运营合伙人 ,对新媒体感兴趣,对光电产业和行业感兴趣。非常有意者通过以下方式联我们!条件待遇面谈联系邮箱:uestcwxd@126.com
QQ:493826566