主要介绍下用正点原子的战舰(STM32F103ZET6)外接我们的蓝牙扩展版跑蓝牙协议栈的初始化以及搜索演示
本专栏文章我们会以连载的方式持续更新,本专栏计划更新内容如下:
第一篇:蓝牙综合介绍 ,主要介绍蓝牙的一些概念,产生背景,发展轨迹,市面蓝牙介绍,以及蓝牙开发板介绍。
第二篇:Transport层介绍,主要介绍蓝牙协议栈跟蓝牙芯片之前的硬件传输协议,比如基于UART的H4,H5,BCSP,基于USB的H2等
第三篇:传统蓝牙controller介绍,主要介绍传统蓝牙芯片的介绍,包括射频层(RF),基带层(baseband),链路管理层(LMP)等
第四篇:传统蓝牙host介绍,主要介绍传统蓝牙的协议栈,比如HCI,L2CAP,SDP,RFCOMM,HFP,SPP,HID,AVDTP,AVCTP,A2DP,AVRCP,OBEX,PBAP,MAP等等一系列的协议吧。
第五篇:低功耗蓝牙controller介绍,主要介绍低功耗蓝牙芯片,包括物理层(PHY),链路层(LL)
第六篇:低功耗蓝牙host介绍,低功耗蓝牙协议栈的介绍,包括HCI,L2CAP,ATT,GATT,SM等
第七篇:蓝牙芯片介绍,主要介绍一些蓝牙芯片的初始化流程,基于HCI vendor command的扩展
第八篇:附录,主要介绍以上常用名词的介绍以及一些特殊流程的介绍等。
另外,开发板如下所示,对于想学习蓝牙协议栈的最好人手一套。以便更好的学习蓝牙协议栈,相信我,学完这一套视频你将拥有修改任何协议栈的能力(比如Linux下的bluez,Android下的bluedroid)。

-------------------------------------------------------------------------------------------------------------------------
CSDN学院链接(进入选择你想要学习的课程):
蓝牙交流扣扣群:970324688
Github代码:
入手开发板:
蓝牙学习目录:
--------------------------------------------------------------------------------------------------------------------------
使用步骤操作如下:!!!!!!!!!!!!!!!!!!!!
步骤 1)准备好代码,从github下载下来最新的代码(在上面有介绍Github连接)
步骤 2)连接好硬件
分为以下几个小的步骤:
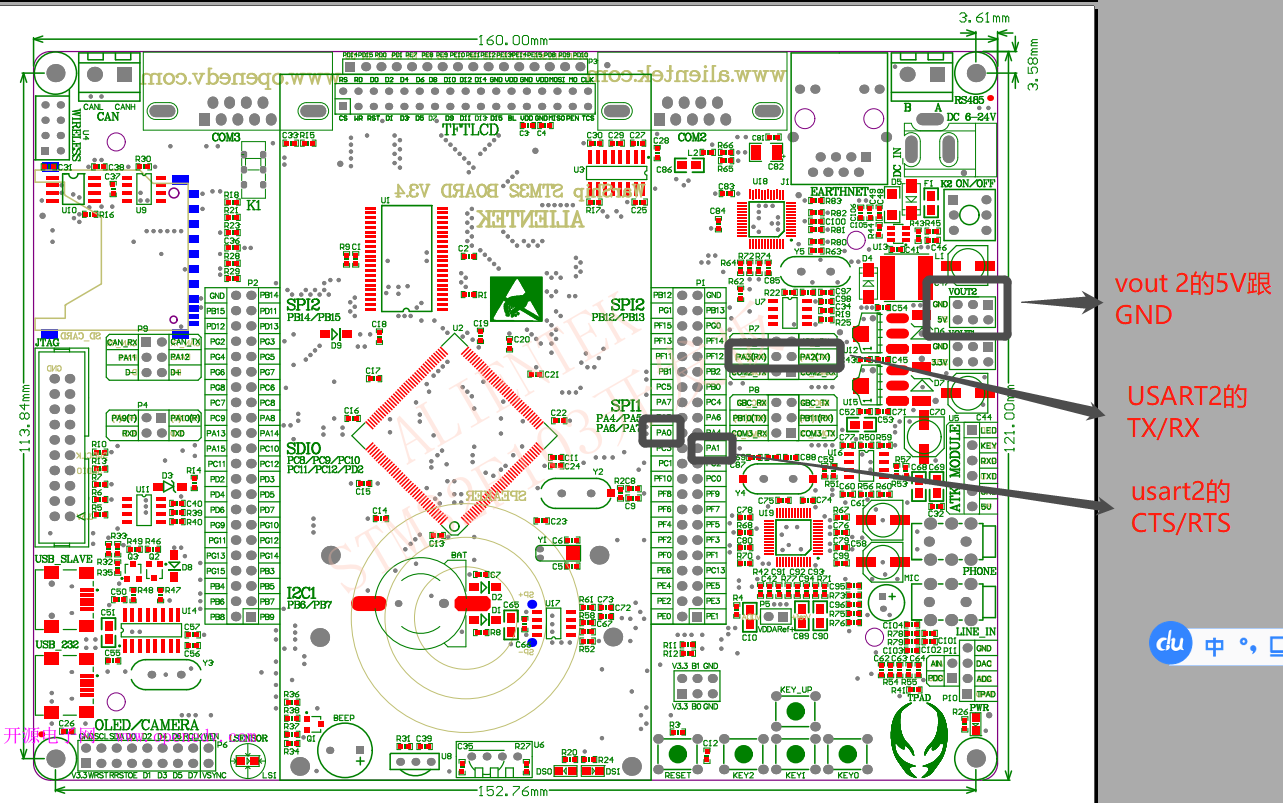
① UART2 TX/RX的接线
首先我们把原子的战舰开发板的P7的两个跳帽拔掉,分别把模组的丝印的TX接到P7的3pin上,然后把模组的RX接到P7的4 pin上

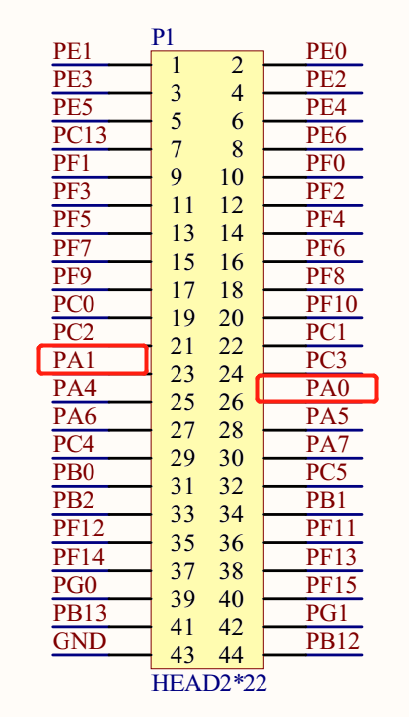
另外由于我们蓝牙协议栈跑的是Transport h4,所以需要流控功能,所以需要接CTS/RTS,所以我们还需要把模组的CTS接到原子战舰的PA0,模组的RTS接到原子战舰的PA1
② 电源,GND接线
原子有单独的VOUT,因为我们的模组是5V供电,所以我们把模组的5V接到VOUT2的5V上,把GND接到战舰的VOUT2的GND上

整个正点原子接线位置如下
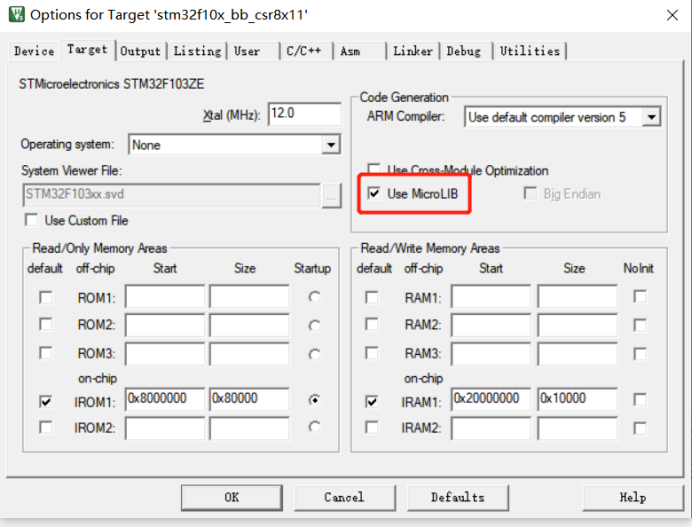
步骤 3)打开Keil工程文件夹下的project\stm32f10x_bb_csr8x11_bt\stm32f10x_bb_csr8x11.uvprojx,然后编译下载
注意几点:
① 设备类型修改为F103ZET6

② 下载的时候要勾选Use micro lib
步骤4)打开串口工具(我用的是XCOM),然后做初始化动作,在发送串口敲BT_START,点击发送,出来以下log就证明初始化通过了,我们就可以来进行搜索动作了,注意一点:不能勾选发送新行,否则会解析错误
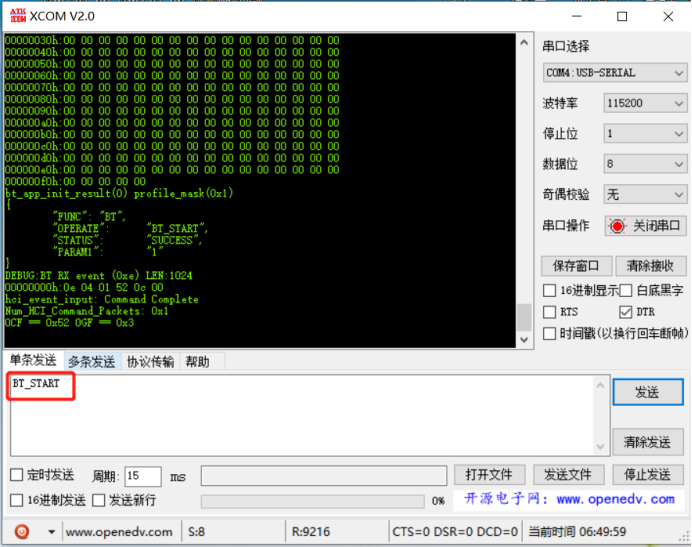
步骤5)然后敲BT_INQUIRY就能搜索到设备了

步骤跟AT的1)2)3)一样,我们从第四步开始讲解
打开我们工程源码1-BLUETOOTH\mcu_bt_tool\mcu_bt_tool\mcu_bt_tool\bin\Debug中的mcu_bt_tool.exe,当然你也可以直接用VS2010打开工程
步骤 4)打开串口
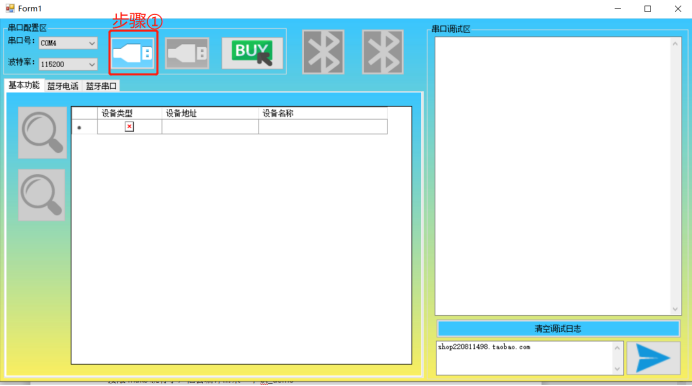
步骤 5)点击蓝牙开启按钮(此步骤跟AT 命令BT_START一样的效果,就是实现蓝牙初始化)
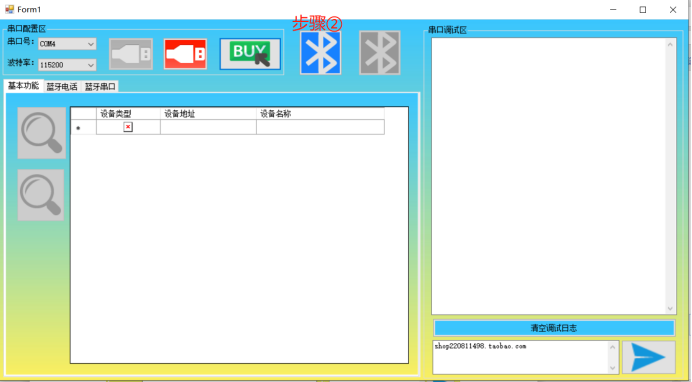
步骤 6) 等待初始化完成点击搜索按钮,你就发现可以搜索到蓝牙了

另外:使用上位机的时候注意几点:
① mcu_bt_tool.exe你如果想把可执行文件拿到别的路径单独执行,那么必须要把Newtonsoft.Json.dll跟exe放在同一个路径下,因为上位机是跟STM32用json沟通的
② 因为目前搜索是开启的EIR,带RSSI的,所以他会重复性上来同一个设备,我没做根据同一个蓝牙地址做显示过滤,如果有兴趣的人可以加上这一块
步骤 1)Type C uart debug口的tx,rx初始化
/******************************************************************************
* func name : hw_uart_debug_init
* para : baud_rate(IN) --> Baud rate of uart1
* return : hw_uart_debug_init result
* description : Initialization of USART1.PA9->TX PA10->RX
******************************************************************************/
uint8_t hw_uart_debug_init(uint32_t baud_rate)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
/* Enable RCC clock for USART1,GPIOA,DMA1 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
/* Initialization GPIOA9 GPIOA10 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Data format :1:8:1, no parity check, no hardware flow control */
USART_InitStructure.USART_BaudRate = baud_rate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
/* Enable USART interrupts, mainly for idle interrupts */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=DEBUG_PREE_PRIO;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = DEBUG_SUB_PRIO;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* Initializes USART1 to enable USART, USART idle interrupts and USART RX DMA */
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);
USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE);
USART_Cmd(USART1, ENABLE);
/* Initializes DMA and enables it */
DMA_DeInit(DMA1_Channel5);
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&USART1->DR;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)uart1_rev_buffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = UART1_MAX_REV;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel5, &DMA_InitStructure);
DMA_Cmd(DMA1_Channel5, ENABLE);
return HW_ERR_OK;
}可以看到TX我们就是普通的实现发送,RX我们用串口空闲中断 DMA的方式来实现接受串口工具以及上位机的发送指令,然后串口中断的实现原理是这样:
/******************************************************************************
* func name : USART1_IRQHandler
* para : NULL
* return : NULL
* description : Interrupt handler for usart1
******************************************************************************/
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET)
{
/* Without this, the interrupt cannot be cleared and continues into the interrupt */
USART_ReceiveData(USART1);
uart1_rev_len =UART1_MAX_REV-DMA_GetCurrDataCounter(DMA1_Channel5);
if(uart1_rev_len != 0)
{
/* Call the parse function */
shell_parse(uart1_rev_buffer);
hw_memset(uart1_rev_buffer,0,sizeof(uart1_rev_buffer));
}
/* Clear the interrupt and reset DMA */
USART_ClearITPendingBit(USART1,USART_IT_IDLE);
uart1_dma_enable(DMA1_Channel5);
}
}步骤2)收到串口工具或者上位机的解析函数如下:
uint8_t shell_parse(uint8_t *shell_string)
{
uint8_t result = HW_ERR_OK;
cJSON* parse_json = cJSON_Parse((const char *)shell_string);
uint8_t* func_value = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"FUNC"))->valuestring;
uint8_t* operate_value = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"OPERATE"))->valuestring;
uint8_t* para1 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM1"))->valuestring;
uint8_t* para2 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM2"))->valuestring;
uint8_t* para3 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM3"))->valuestring;
uint8_t* para4 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM4"))->valuestring;
uint8_t* para5 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM5"))->valuestring;
uint8_t* para6 = (uint8_t*)((cJSON *)cJSON_GetObjectItem(parse_json,"PARAM6"))->valuestring;
if(hw_strcmp((const char *)func_value,"BT") == 0)
{
result = shell_json_parse(operate_value,para1,para2,para3,para4,para5,para6);
}
else
{
result = shell_at_cmd_parse(shell_string);
}
cJSON_Delete(parse_json);
return result;
}在这里我们分两种方式来解析:①AT command(串口工具采用这种方式) ②Json(上位机采用这种方式),如果解析不是我们定义的json格式,那么就自动转变为AT指令的解析
步骤3)AT command解析执行BT_START,以及BT_INQUIRY
uint8_t shell_at_cmd_parse(uint8_t *shell_string)
{
if(hw_strcmp("BT_START",(const char*)shell_string) == 0)
{
HW_DEBUG("SHELL:operate bt start\n");
bt_start(&bt_app_cb);
return HW_ERR_OK;
}
........
if(hw_strcmp("BT_INQUIRY",(const char*)shell_string) == 0)
{
HW_DEBUG("SHELL:operate bt inquiry\n");
bt_start_inquiry(0x30,HCI_INQUIRY_MAX_DEV);
return HW_ERR_OK;
}
}步骤4)接受上位机json指令解析
uint8_t shell_json_parse(uint8_t *operate_value,
uint8_t *para1,uint8_t *para2,uint8_t *para3,
uint8_t *para4,uint8_t *para5,uint8_t *para6)
{
if(hw_strcmp((const char *)operate_value,"BT_START") == 0)
{
HW_DEBUG("UART PARSE DEBUG:operate BT_START\n");
bt_start(&bt_app_cb);
operate_stauts_oled_show("BT",operate_value,"SUCCESS",0,0,0,0,0,0);
return HW_ERR_OK;
}
.....
if(hw_strcmp((const char *)operate_value,"BT_START_INQUIRY") == 0)
{
HW_DEBUG("UART PARSE DEBUG:operate BT_INQUIRY\n");
bt_start_inquiry(0x30,HCI_INQUIRY_MAX_DEV);
return HW_ERR_OK;
}
}以上步骤3)4)其中bt_start以及bt_start_inquiry就是协议栈函数了,这样就实现了AT command或者json上位机跟蓝牙协议栈的对接。
