车载嵌入式软件的设计要求极其复杂,涉及高安全性、高可靠性以及实时性等多个方面。
RTOS在车载嵌入式系统中扮演着至关重要的角色,尤其在实时任务调度、资源管理和多任务协作方面。

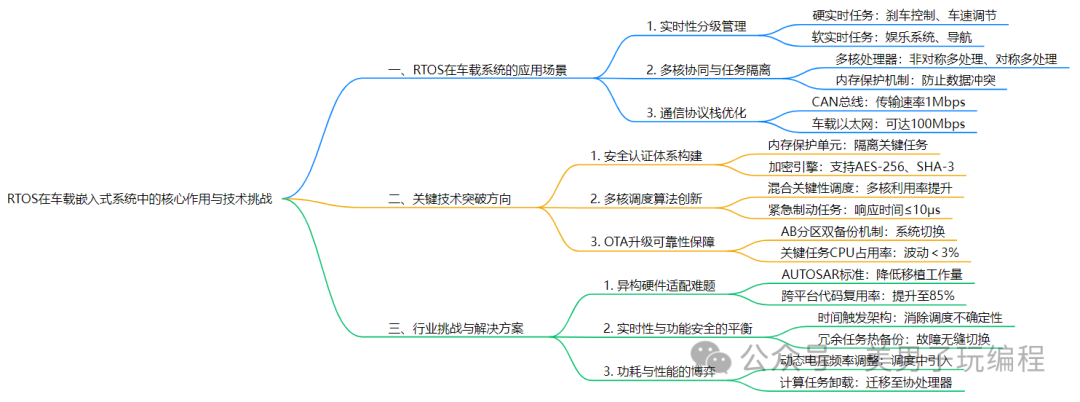
以下将从RTOS的应用场景、关键技术和面临的挑战几个方面深入分析其在车载嵌入式系统中的应用。
1
RTOS在车载嵌入式软件中的应用
1. 实时性要求
车载嵌入式系统通常需要处理大量来自传感器(如激光雷达、摄像头、加速度计等)和执行器(如电动机、刹车系统等)的数据,并对其做出快速响应。
RTOS能够确保这些任务在指定的时间内完成,从而满足实时性要求。
2. 多任务管理
车载系统通常是由多个子系统(如动力总成、驾驶辅助、车载信息娱乐系统等)共同构成的,每个子系统都需要独立的任务管理。
RTOS通过提供任务切换、优先级调度、同步机制等功能,使得这些不同子系统之间的任务可以并发运行而不会相互干扰。
3. 资源管理
车载嵌入式系统面临着严苛的资源约束,包括计算能力、内存容量、存储空间等。
RTOS提供的内存管理、信号量、互斥锁等机制,有助于确保资源的高效使用,并避免资源的浪费或冲突。
4. 通讯管理
车载系统中,各种传感器、执行器和控制单元通常需要通过多种通信协议(如CAN、Ethernet、LIN、FlexRay等)进行交互。
RTOS提供的底层通讯驱动和接口抽象层,可以简化不同协议栈的管理和数据传输。
2
RTOS在车载嵌入式软件中的挑战
1. 系统安全性
车载嵌入式系统通常在复杂且动态的环境中运行,面临着诸如恶意攻击、系统崩溃、硬件故障等各种风险。
RTOS需要提供强大的安全保障机制,确保系统在面临外部攻击或内部故障时仍能稳定运行。
2. 实时性保证
车载系统中的实时性要求极高,尤其是自动驾驶等领域。
RTOS需要确保各类任务能够按时完成,否则可能影响到系统的安全性和可靠性。
实现这一目标涉及到RTOS调度算法、任务优先级管理、时间片分配等多个方面的优化。
3. 系统集成与兼容性
车载嵌入式系统通常由多个硬件平台和软件组件组成,不同的硬件平台、芯片架构和外设可能需要不同的驱动和中间件。
RTOS在这种环境中需要具备很高的系统兼容性,能够适应不同的硬件平台,同时保证系统的稳定性和安全性。
4. 系统升级与维护
车载系统在使用过程中,往往需要进行远程升级或维护,以应对新的需求或修复漏洞。
RTOS需要支持灵活的升级机制,尤其是在实时性、系统稳定性和安全性方面。
RTOS在车载嵌入式系统中具有不可或缺的作用,它能够提供精确的任务调度、高效的资源管理、强大的实时性保障等功能。
然而,由于车载系统的复杂性,RTOS在应用中也面临诸如安全性、实时性保证、系统集成等多方面的挑战。
因此,如何在保持高实时性的同时,保障系统的稳定性、安全性和可维护性,是RTOS在车载嵌入式软件中亟待解决的关键问题。