传统的陀螺罗盘虽然能够提供自主的定向引导和路径校正,但由于其尺寸较大,在广泛的应用中面临局限性,使其难以适配紧凑型设备。微机电系统(MEMS)陀螺罗盘为微型化提供了一种有前景的替代方案。然而,目前的MEMS陀螺罗盘需要集成电机旋转调制技术来实现高精度寻北,而以往研究中的传统电机体积较大且存在剩磁效应,从而削弱了它们的尺寸优势。
据麦姆斯咨询报道,近日,南京理工大学、中国工程物理研究院等机构的研究人员组成的团队创新性地提出了一种基于MEMS行波微电机的微型MEMS陀螺罗盘,首次集成了芯片级旋转执行器,并结合精确的多位置制动控制系统,实现了高精度且快速的寻北。所提出的MEMS陀螺罗盘取得了重大进展,其体积缩小至50 mm × 42.5 mm × 24.5 mm,在2秒内实现了0.199°的定位精度,其体积仅为现有最小同类陀螺罗盘的一半,且性能是其两倍。这些改进表明,本文所提出的MEMS陀螺罗盘适用于室内工业机器人、自动驾驶和其它需要精确定向引导的相关领域。上述研究成果以“A MEMS traveling-wave micromotor-based miniature gyrocompass”为题发表于Microsystems & Nanoengineering期刊。
MEMS陀螺罗盘的结构设计
基于MEMS行波微电机(MTWMM)的陀螺罗盘的整体结构如图1a所示。该陀螺罗盘由MEMS行波微电机、旋转调制平台、MEMS电容式角位置传感器、分段式电机芯片安装基座、电磁制动部件、无线供电单元和集成控制电路构成,所有这些部件均封装在外壳和盖板内。通过为集成控制电路供电并利用上位机软件输入控制指令,即可完成方位角检测。如图1b所示,为确保陀螺敏感轴平行于地面,MEMS单轴陀螺仪垂直安装在圆形基础电路上,形成惯性测量单元(IMU)。该装置位于大型齿轮平台上,并通过带有角位置传感器转子的传感器安装座固定在平台上,共同构成旋转调制平台(RMP)。
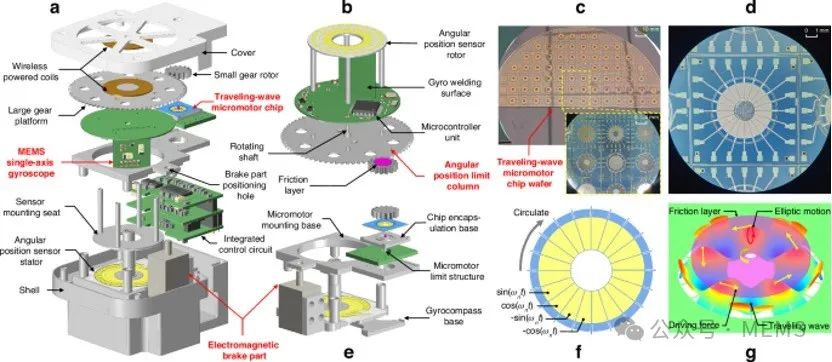
图1 MEMS陀螺罗盘的结构模型和MEMS行波微电机
MEMS行波微电机采用MEMS技术进行加工,得到的MEMS芯片晶圆如图1c所示。晶圆切割后,可以提取任意单个MEMS芯片进行封装和测试,如图1d所示。如图1e所示,MEMS行波微电机被封装在基座上,并通过金线连接到外部电路,以实现图1f所示的四个正弦驱动信号输入。所有金属机械部件的制造精度均为5 μm。每个组件的定位确保了同心度和平行度。旋转调制平台通过旋转轴和轴承的组装,以倒置的方式创新性地安装在陀螺罗盘基座上,进一步增加了集成度并降低了陀螺罗盘的高度。
MEMS行波微电机的驱动原理
如图1f所示,通过控制每组四个电极之间的驱动电势以保持90°的相位差,两个正交的驻波依次在电机微定子上形成,这些驻波的叠加产生一个行波。
由于行波运动,在任何给定时刻总会存在n对波峰和波谷。这些波峰沿微定子圆周旋转,导致与波传播方向相反的椭圆运动,如图1g所示。行波的表面粒子和摩擦层之间存在速度差,这通过滑动摩擦产生围绕轴线的对称驱动力,从而驱动摩擦层的旋转。如图1b所示,摩擦层与小齿轮转子组装在一起。因此,通过施加四个相位差为90°的正弦驱动信号,可以驱动小齿轮转子旋转。
MEMS陀螺罗盘的寻北原理
地球模型与导航参考坐标系如图2a所示,四位置Maytagging寻北原理与机体参考坐标系如图2b所示。四位置Maytagging方法通过区分对称位置陀螺仪的输出来补偿MEMS陀螺仪的偏置不稳定性(BI),纬度和比例因子对寻北精度的影响可以在很大程度上忽略不计。这种方法适用于地理位置未知或难以获得的环境,因为它提供了一种简单、高效和准确的确定真北的方法。
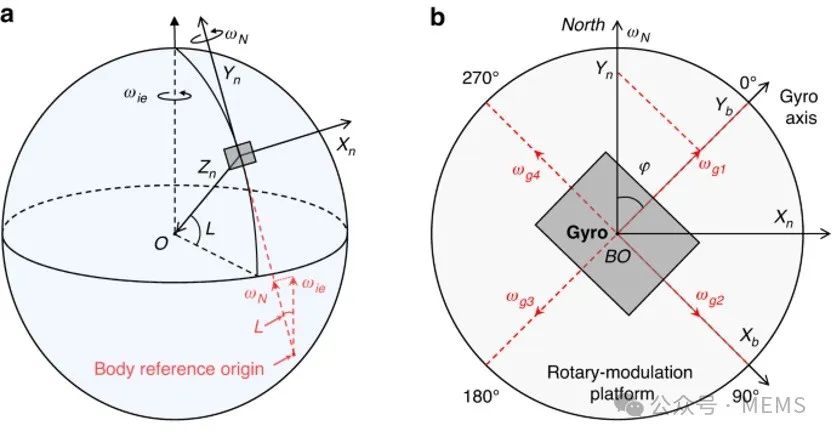
图2 MEMS陀螺罗盘的寻北原理
MEMS陀螺罗盘的硬件和系统
本文所提出的MEMS陀螺罗盘硬件和系统主要包括以下三个部分:集成控制电路、角位置控制模块和旋转调制平台,如图3a所示。图3b显示的是使用显微激光测振仪观察到的微定子上激发的行波(黄色虚线圆圈表示观察到的行波的一个波峰)。
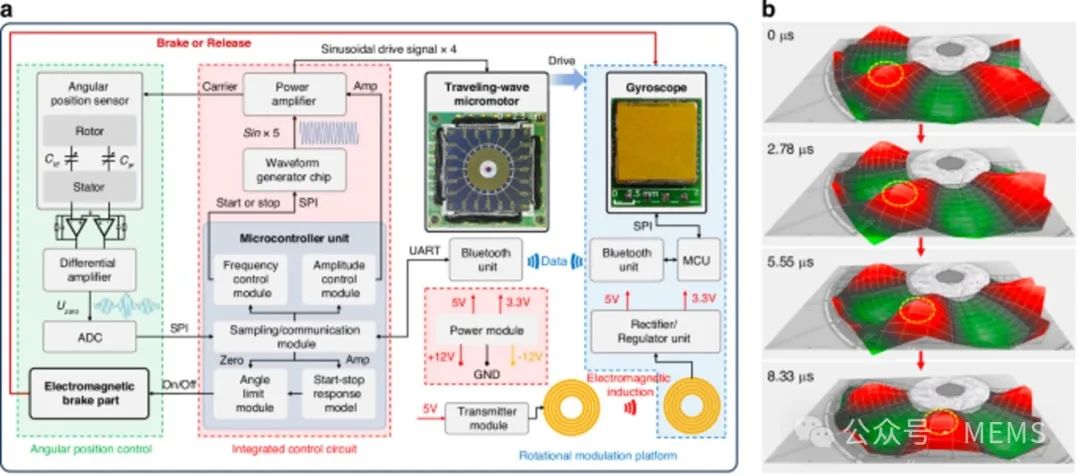
图3 MEMS陀螺罗盘硬件和行波
MEMS陀螺罗盘中MEMS陀螺仪的性能表征
如图4a所示,整个陀螺罗盘可分为四个部分:盖板、旋转调制平台、驱动控制平台和外壳。按照图1a所示的定位组装后,得到尺寸为50 mm × 42.5 mm × 24.5 mm的完整MEMS陀螺罗盘,如图4b所示。
为了评估MEMS陀螺仪的性能,研究人员在整个系统内对陀螺仪进行了测试。角速度数据从蓝牙模块传输到集成控制电路,然后发送到上位机软件。连续采样200分钟后的MEMS陀螺仪的Allan偏差如图4c所示。在整个系统内,MEMS陀螺仪的偏置不稳定性为0.0179°/h,角随机游走(ARW)为0.0041°/√h。在使用单个陀螺仪进行多位置寻北时,陀螺仪的随机漂移无法得到补偿。
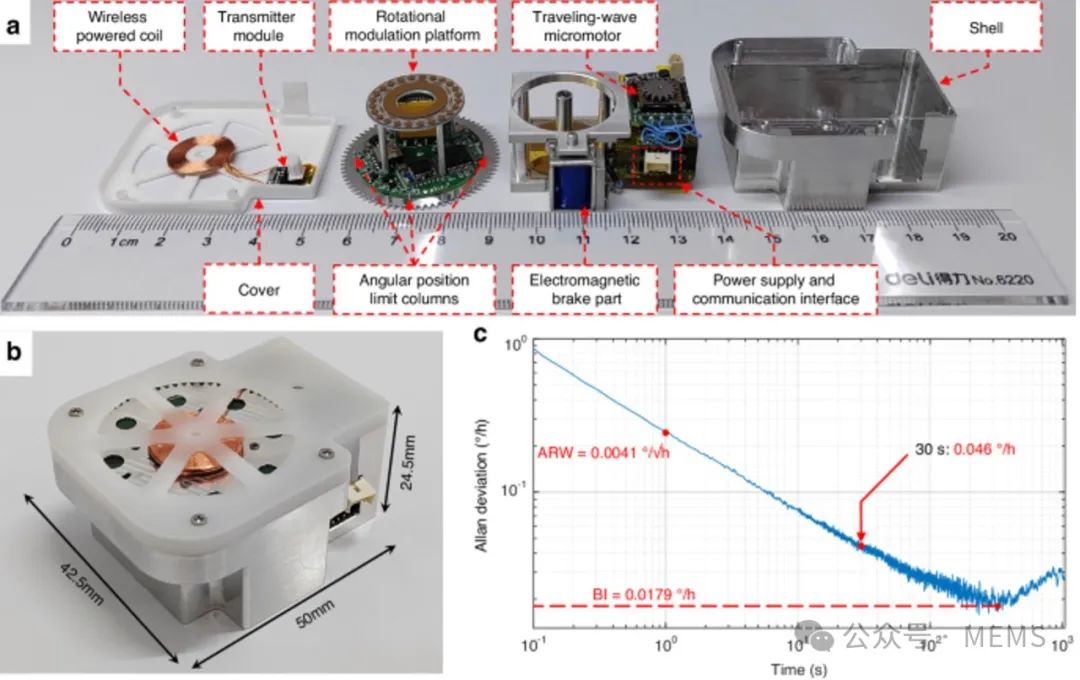
图4 基于MEMS行波微电机的陀螺罗盘原型和MEMS陀螺仪的性能表征
MEMS陀螺罗盘的性能测试
如图5a所示,寻北测试装置利用三轴高精度转台作为陀螺罗盘的方位参考。基于MEMS行波微电机的驱动幅值和频率利用上位机软件设置,单个寻北工作的总持续时间配置为2分钟(对应于旋转调制平台上每个位置约30秒的采样时间)。如图5b所示,在旋转调制平台的四个位置,MEMS陀螺仪的角速度数据被依次收集和存储,在30秒的采样周期内收集了大约340个数据点。经过上位机软件处理和平均后,可根据四位置Maytagging方法计算0°位置和真北之间的顺时针角度(即方位角)。寻北测试结果如图5c-5e所示。
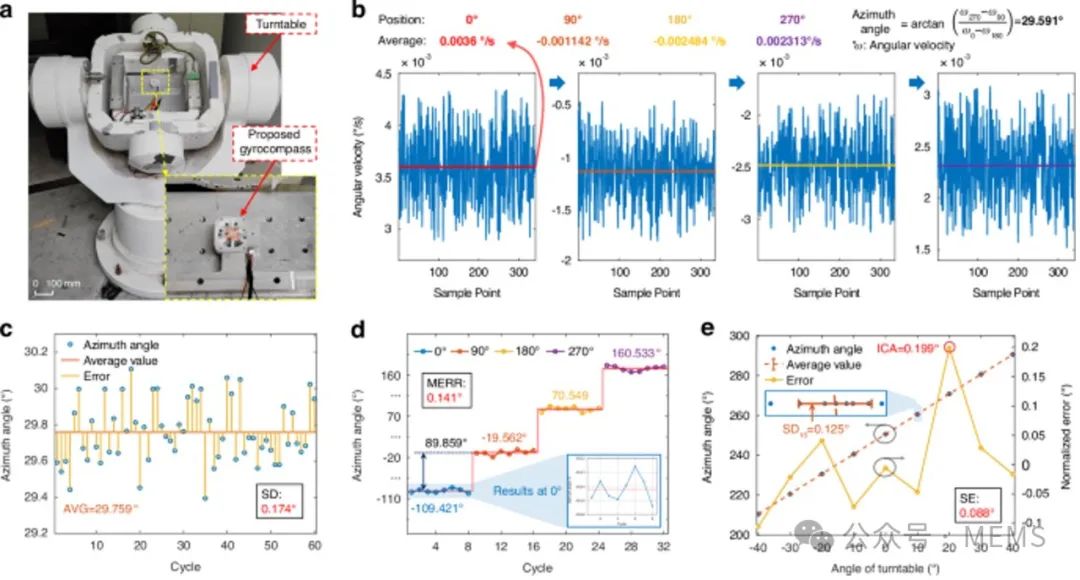
图5 MEMS陀螺罗盘的寻北测试结果
小结
综上所述,这项研究首次提出了一种基于MEMS行波微电机的微型MEMS陀螺罗盘。利用MEMS行波微电机作为无电磁干扰旋转执行器,研究人员开发了一套采用四位置Maytagging方法的完整寻北系统。该系统只需外部电源和上位机控制即可进行方位角检测,原型尺寸缩小至50 mm × 42.5 mm × 24.5 mm。结合MEMS行波微电机的摩擦驱动特性和MEMS电容式角位置传感器提供的绝对零位,研究人员建立了一套位置控制精度为0.024°的多位置制动控制系统。在整个系统内,MEMS陀螺仪的偏置不稳定性(BI)为0.0179°/h。寻北性能的测试结果表明,在2分钟的寻北时间内,所提出的陀螺罗盘在9个位置的内符合精度(ICA)为0.199°,在固定位置的标准差(SD)为0.174°。该研究验证了MEMS行波微电机的实用性,并表明其是高精度、微型化MEMS陀螺罗盘的理想执行器,为旋转调制技术的微型化提供了一种有前景的解决方案。未来,研究人员将进一步探索MEMS陀螺罗盘在室内自主导航和自动驾驶等领域的集成。
论文链接:
https://doi.org/10.1038/s41378-025-00868-9