

高压氮化镓大家普遍比较熟悉,国内知名厂商英诺赛科,国外有英飞凌,EPC,TI,纳微等。
现阶段氮化镓广泛应用于消费级充电器。对于电源来说,开关频率越高,就像高铁一样,车次越多,单位时间内能运送的人也越多,那么传递的能量越多,电源的功率密度可以大幅度提升,进而尺寸缩小。
对于电机应用来说,因为其原理的原因,逆变器主要是通过SVPWM完成DC-AC的逆变,其开关频率只能影响谐波,无法提高能量密度,并且电机控制普遍是硬开关居多,软开关不能说没有,非常罕见。
以上是氮化镓在电源和电机的应用差异的介绍。
*******************************************
下面介绍下人形上可能应用的氮化镓型号。
一般国外厂商,把650V氮化镓称为高压,因为材料的限制,氮化镓耐压做不高,无法像碳化硅做到1200V甚至2000V。
对于100V的氮化镓,一般称为中压氮化镓,即MV GaN;
40V以下的氮化镓,称为低压氮化镓,即LV GaN;
高压氮化镓已经量产很久了,价格也不贵,尤其国产的GaN。
对于中压氮化镓,现阶段各大厂商都是量产没多久,价格高昂。

因为成本高昂,而且MOSFET普遍价格走低,那么中压GaN的应用前景扑朔迷离。
以上是现阶段,行业内对MV GaN的前景担忧。
*******************************************
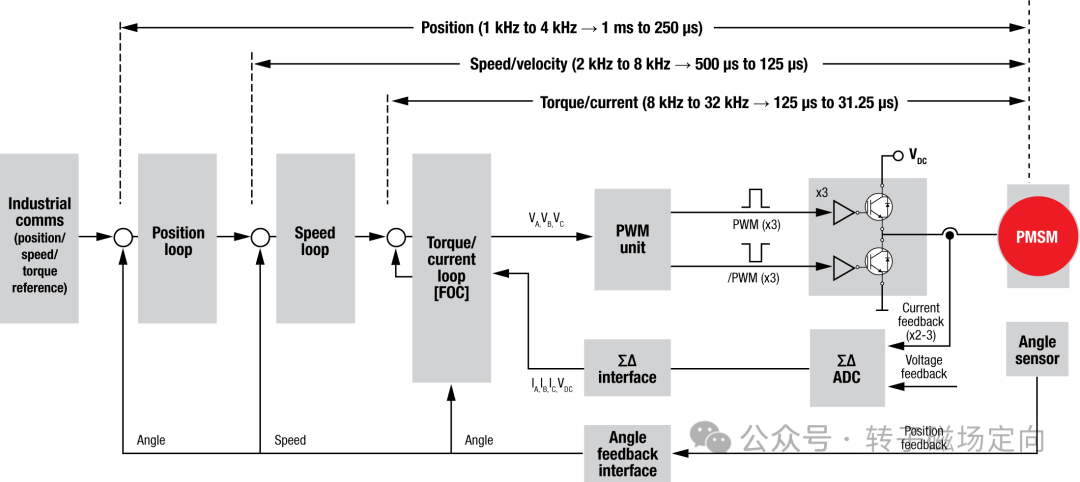
下面介绍人形机器人的应用,人形机器人集成了许多子系统,包括伺服控制系统、电池管理系统 (BMS)、传感器系统、AI 系统控制等。
通常在整个机器人中部署大约 40 个伺服电机 (PMSM) 和控制系统。电机分布在机器人身体的不同部位,例如颈部、躯干、手臂、腿、脚趾等。该数字不包括手部的电机。为了模拟人手的自由操作,单只手即可能集成十多个微型电机。这些电机的电源要求取决于所执行的具体功能;例如,驱动机器人手指的电机可能只需要数安培电流,而驱动髋关节或腿的电机可能需要 100 安培或更高的电流。
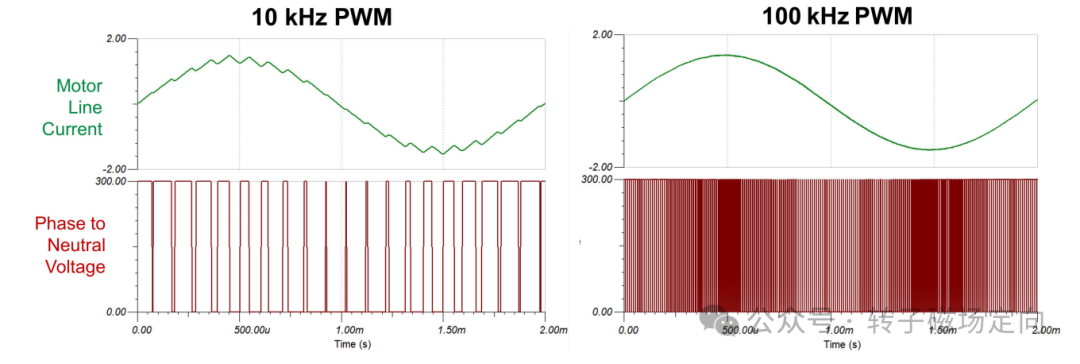
电流谐波的降低,那么可以直接降低电机的损耗。
考虑到人形机器人和机械臂都是密闭腔体,那么电机的损耗降低,是可以降低系统温升的。
除此之外,我发现英飞凌和TI都有共同的结论:
增加 PWM 开关频率可以减小 DC 总线电容器的尺寸和电容
降低电容尺寸和容量,那么电解电容可以更换为陶瓷电容,总的成本,尺寸,高度都有下降,间接提高了功率密度。
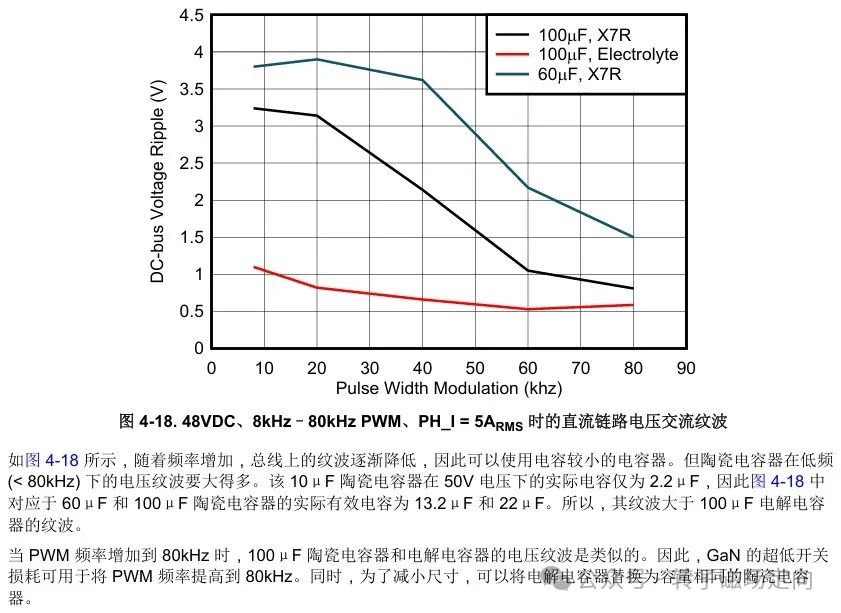
当 PWM 频率增加时,每个单位时间消耗的电荷量减小,这意味着所需的总线电容减少。根据 TI 的测试,将 PWM 频率从 20kHz 提高到 80kHz 后,可以用电容相等的陶瓷电容器代替电解电容器,以获得相似的总线电压纹波。与电解电容器相比,陶瓷电容器具有明显优势:更小的尺寸、更长的使用寿命、更好的高频特性等。
减小开关损耗
GaN 之所以能够实现如此低的开关损耗,源于 GaN 器件的特性。GaN 器件具有更小的栅极电容 (CG) 和更小的输出电容 (Coss),可实现达到 Si-MOSFET 100 倍的开关速度。由于关断和开通时间缩短,可以在较短的范围内控制死区时间,例如 10-20ns,而 MOSFET 通常需要约 1us 的死区时间。
死区时间的缩短可降低开关损耗。此外,GaN FET 没有体二极管,但续流功能通过第三象限操作实现。在高频 PWM 场景中,MOSFET 的体二极管会导致较大的反向恢复损耗(Qrr 损耗)。第三象限操作还可避免开关节点响铃和由体二极管引起的 EMI 风险,从而降低对高功率密度人形机器人中其他器件的干扰。
最后说到成本,在这一点上我觉得不是问题,只要国内厂商进去卷,价格下来只是时间问题。过去几年的市场已经证明这个结论。
基于以上结论,氮化镓在人形机器人的应用中,存在较大潜力。今年我会做一些相关应用的探索。
实际应用中,要解决散热,过载,采样等多重问题,在后面的文章中逐步分享。
TI原文链接:
人形机器人 | GaN FET 在人形机器人中的应用

