

点击蓝字 关注我们
主页右上「· · ·」添加星标 更新不错过!



欢迎来到模拟芯视界
在上期中,我们探讨了跳频技术及其演变,并对传统方法和高级方法(例如通用输入/输出 (GPIO) 和快速重新配置接口 (FRI))进行了比较。
本期,为大家带来的是《为汽车区域性配电系统中的非板载容性负载供电》,将讨论使用高侧开关控制器解决驱动容性负载挑战的各种方法。

引言
车辆架构从域向区域的转变显著改变了汽车的配电方式,基于半导体开关的解决方案(请参阅图 1)正在取代传统的熔断型保险丝用于线束保护。这些解决方案具有诸多优势,例如保险丝时间电流的可变性更小,因此可以降低线束的电缆直径、重量和成本。半导体开关还可远程复位,这意味着保险丝不必易于触及,使设计人员能够将保险丝放置在更合理的位置以缩短从电源到负载的电缆长度。
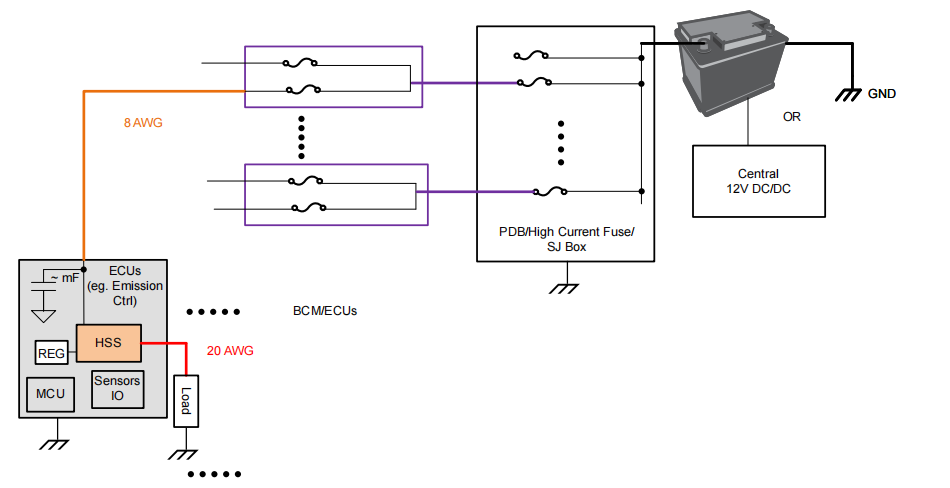
图 1:基于域的配电架构
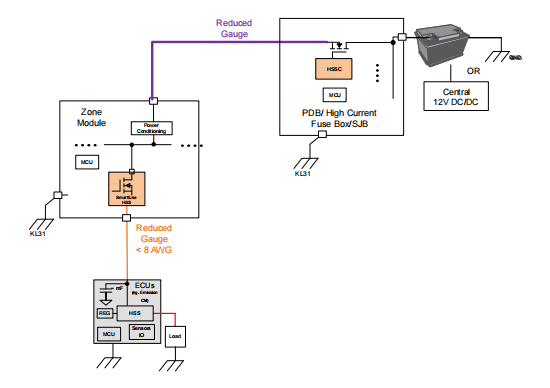
图 2:基于区域的配电架构
使用半导体开关作为智能保险丝器件时,系统面临的设计挑战包括降低开关处于导通状态时的静态电流,以及开启输出来为负载(电子控制单元 [ECU] 输入)中常见的大型容性负载供电。ECU 的输入电容范围为 47µF 至 5mF,启动时间(快速充电时间 <1ms、中等充电时间 <10ms、慢速充电时间 <50ms)需要根据每个配电盒 (PDB) 输出端上连接在一起的 ECU 类型和数量考虑。在 ECU 启动时间内通过金属氧化物半导体场效应晶体管 (MOSFET) 开关为这些 ECU 输入电容器充电,是区域性架构面临的主要系统设计挑战之一。
在本文中,我们将讨论使用高侧开关控制器解决驱动容性负载挑战的各种方法。
输出电压压摆率控制
这种方法是在栅极与 GND 之间放置电容器 (C),栅极的压摆率和输出电压可以限制浪涌电流。具有输出电压压摆率控制的电路配置如图 3 所示。
方程式 1 和方程式 2 用于计算启动时的浪涌电流和功率耗散:
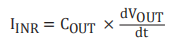
方程式 1

方程式 2
由于 MOSFET 在饱和区域运行,因此浪涌电流应足够低,使启动期间功率耗散保持在其安全工作区 (SOA) 以内。当 MOSFET 的功率耗散降低并存在较长的时间段时,MOSFET 可以处理更多能量 (1/2 COUTVIN2)。因此,浪涌间隔需要延长,以便支持更高的容性负载。
这种方法适合慢充电要求(例如 5mF 和 50ms),但设计必须始终考虑 COUT、FET SOA、充电时间和工作温度之间的权衡。例如,使用 TI 的高侧开关控制器 TPS1211-Q1 作为栅极驱动器,将 5mF 充电至 12V 需要 40ms(浪涌电流限制为 1.5A)。
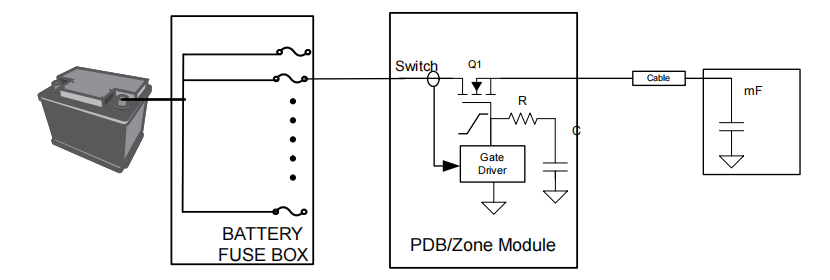
图 3:输出电压压摆率控制电路
并联预充电路径
这种方法通常用于基于大电流并联 FET 的设计,这些设计需要一个额外的栅极驱动器来驱动预充电 FET,如图 4 所示。您可以根据方程式 3 选择预充电路径中的预充电电阻器 (Rpre-ch),以便将浪涌电流限制为特定值:
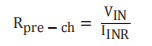
方程式 3
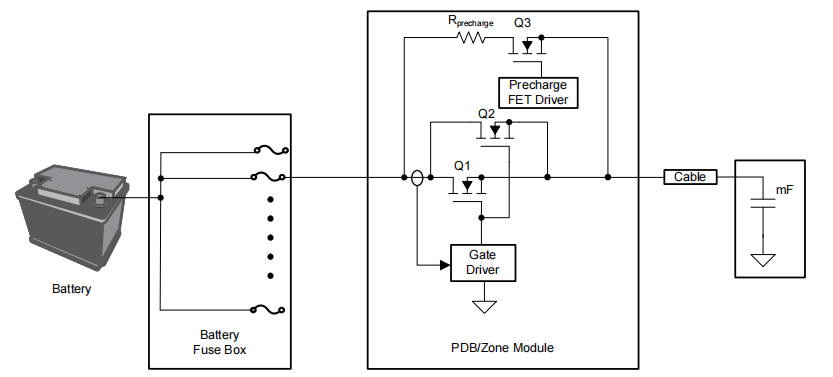
图 4:并联路径中具有预充电电阻器和 FET 的电路
由于预充电电阻器可处理启动期间的所有功率应力,因此它应该能够处理平均功率耗散和峰值功率耗散(以方程式 4 和方程式 5 表示):

方程式 4
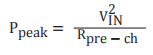
方程式 5
在这种情况下可以进行快速输出充电,但代价是要使用非常大的预充电电阻器。例如,在 10ms 内将 5mF 充电至 12V 需要一个额定功率为 36W、峰值功率处理能力为 360W 的 0.4Ω 预充电电阻器,从而形成一个庞大的绕线电阻器。所以,这种解决方案不适用于许多类型的终端设备,因为同一 PCB 上有许多通道。每个通道将需要一个大型电阻器,导致解决方案的空间利用率较低。
基于 PWM 的电容器自动充电
如图 5 所示,PCB 中的高侧驱动器输出通过 1 米到几米不等的长电缆连接到远程 ECU。例如,一条 50A 导线 (8AWG) 线束具有 2mΩ/米和 1.5µH/米的特性。D1 二极管是系统设计的一部分,可为电缆线束电感电流提供续流路径。高侧驱动器具有强大的栅极驱动输出,能够在较短 (<1µs) 的导通和关断时间内并联驱动 FET,从而提供过流和短路保护。电缆寄生电容、D1 二极管和高侧 MOSFET 构成典型的降压稳压器配置。
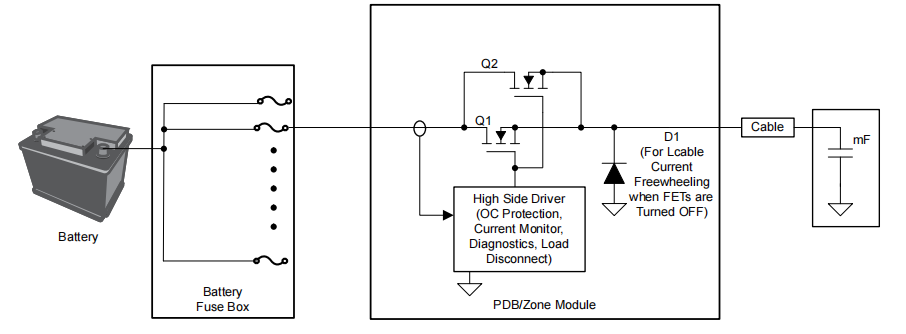
图 5:使用高侧驱动器进行脉宽调制 (PWM) 充电的电路示意图
启动期间,未充电的输出电容器会吸收浪涌电流,并在浪涌电流达到短路保护阈值 (ISCP) 时触发短路事件。高侧驱动器可以关断电源路径并在重试周期 (TAUTO-RETRY) 过后重新执行导通。此过程一直持续到输出电容充满电为止(如图 6 所示),之后高侧驱动器进入正常运行状态并驱动负载。
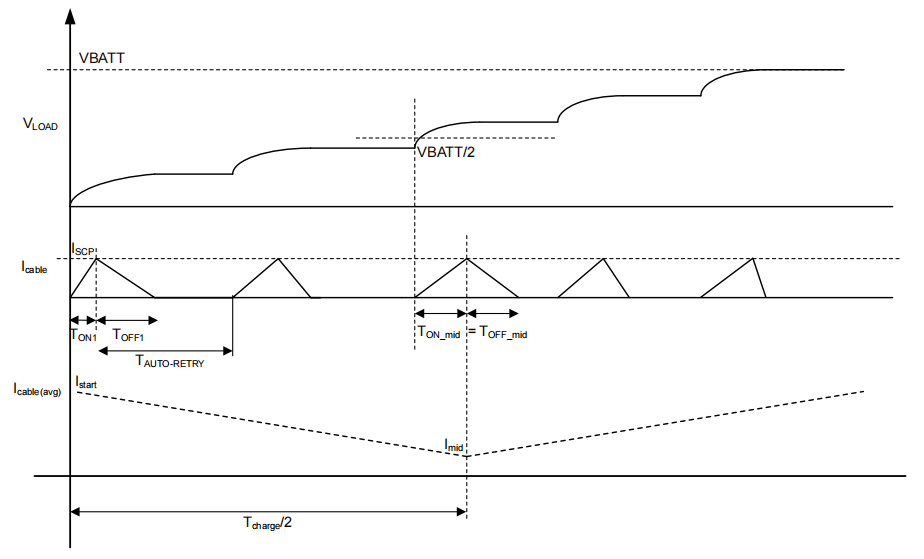
图 6:PWM 充电方法启动期间的概念波形
图 7 展示了控制操作。如图所示,这种方法有两个变量 ISCP 和 TAUTO-RETRY,需要根据输入电压 (VIN)、负载电容和所需充电时间为高侧驱动器设置这两个变量。较高的 ISCP 阈值或较短的 TAUTO-RETRY 延迟可实现更快的输出充电,因此该解决方案适用于任何负载电容值。
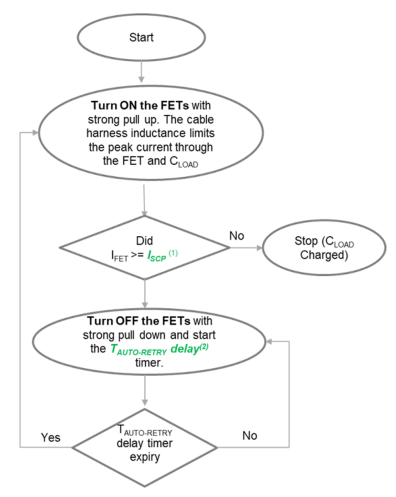
图 7:PWM 充电控制方法的流程图
此解决方案利用了典型高侧驱动器系统中的现有可用空间(电缆线束电感和 D1 二极管),并通过以开关模式运行高侧 MOSFET 来创建一种高效的充电方法。与传统方法不同,建议的解决方案不再依赖于 FET SOA,不再需要庞大的预充电电阻器,也不需要任何预充电 FET 和驱动器。此解决方案使用高侧驱动器固有的短路保护功能,并可以在没有任何外部控制信号或复杂算法的情况下自主运行。
设计注意事项和测试结果
请考虑以下 50A 负载的系统设计示例:
电池电压 (VBATT) = 12V。
负载电容 (CLOAD) = 5mF。
1.5m 电缆 = 8AWG,用于将高侧驱动器连接到 ECU,使 Lcable = 2.25µH。
充电时间 (Tcharge) = 10ms。
续流二极管压降 (VD1) = 0.7V。
该设计涉及选择 ISCP 和 TAUTO-RETRY 参数。对于 50A 负载设计,ISCP 阈值通常设置为比最大负载电流高 20%,因此在本例中,该阈值为 50A × 1.2 = 60A。
现在,要计算 TAUTO-RETRY,请参阅图 6,并根据电容器在 Tcharge/2 中点的电流-电压关系获得方程式 6:

方程式 6
其中:

方程式 7
且

方程式 8
时间间隔 TON1、TOFF1 和 TON_mid 可以通过方程式 9 至方程式 11 进行计算:
方程式 9
方程式 10
方程式 11
代入已知参数 VBATT、Lcable、ISCP、VD1 和 CLOAD 并求解TAUTO-RETRY 可得出实现 10ms 充电时间的重试延迟为<200µs。
图 8 和图 9 显示了使用 TPS1211-Q1 高侧驱动器为 5mF 负载电容充电时的应用原理图和测试设置。TAUTO-RETRY 为 180µs,因此可得出充电时间为 7ms,如图 10 所示。
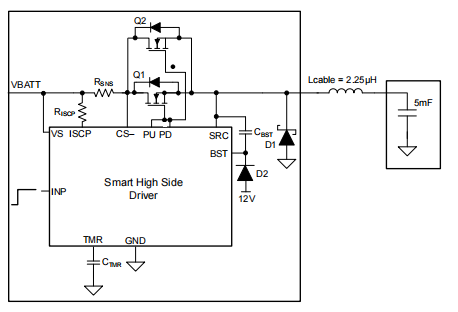
图 8:驱动容性负载的典型应用原理图
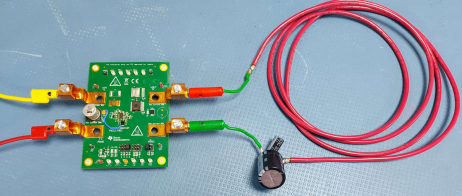
图 9:使用 TPS1211-Q1 评估模块及 1.5m 电缆线束的测试设置
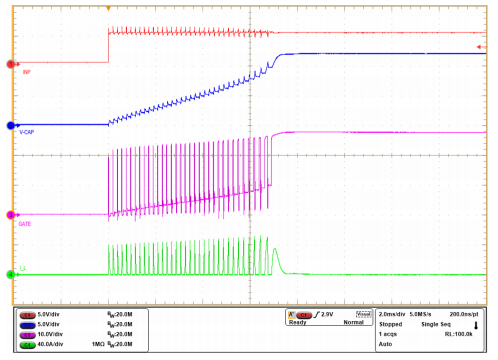
图 10:在开关模式下使用 TPS1211-Q1 以 5mF 负载电容进行启动
结语
基于半导体的智能保险丝解决方案在汽车配电应用中比传统的熔断型保险丝更受欢迎,因为此类解决方案具有显著改善的保险丝时间电流特性和可通过软件进行复位的功能。由于电缆更细且更短,这些优势有助于降低电缆线束的整体重量。
当系统设计采用基于半导体的智能保险丝解决方案时,面临的挑战之一是电容器负载充电是否可以满足系统启动时间要求。TI 的高侧开关控制器器件提供了各种方法来应对容性负载驱动的挑战。
点赞·收藏·推荐 洞见·行业·前沿
点击阅读原文
即刻阅读《模拟设计期刊》电子版,更多相关知识等待解锁!
