| |
| 存储在持久性内存中的全局时间值,用于在启动时计算时间基准的初始值。 |
| |
| 夏令时,也称为日光节约时间,是在夏季月份将时钟提前的做法,使得傍晚的日光持续更长,同时牺牲正常的日出时间。 |
| 通用精确时间协议(Generalized Precision Time Protocol) |
| 网络时间协议(Network Time Protocol) |
| |
| |
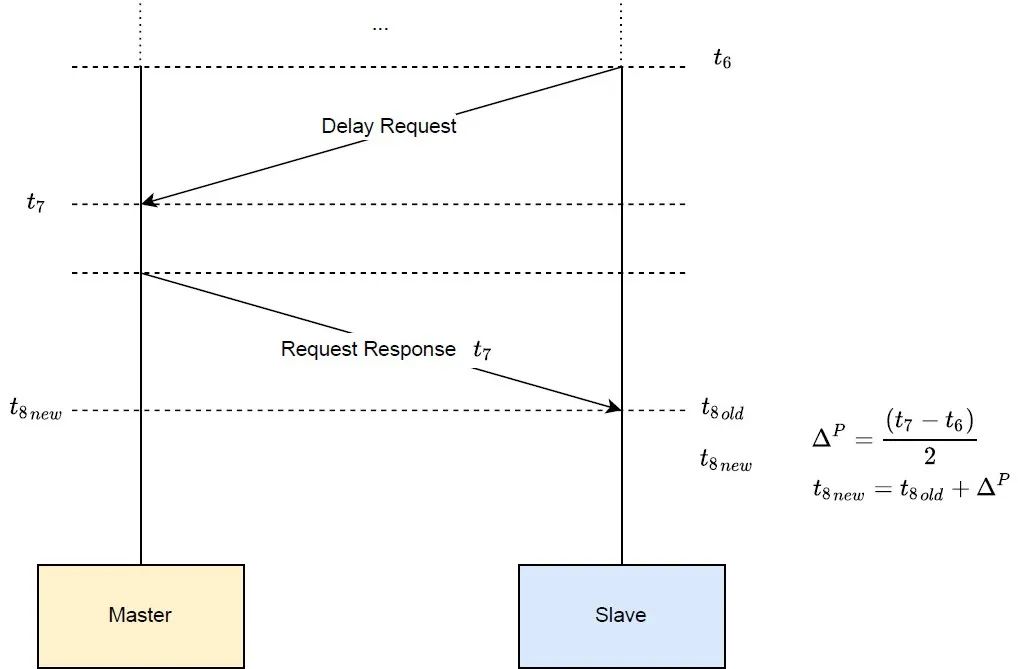
| 传播/路径延迟请求消息(Propagation / path delay request message) |
| 传播/路径延迟响应消息(Propagation / path delay response message) |
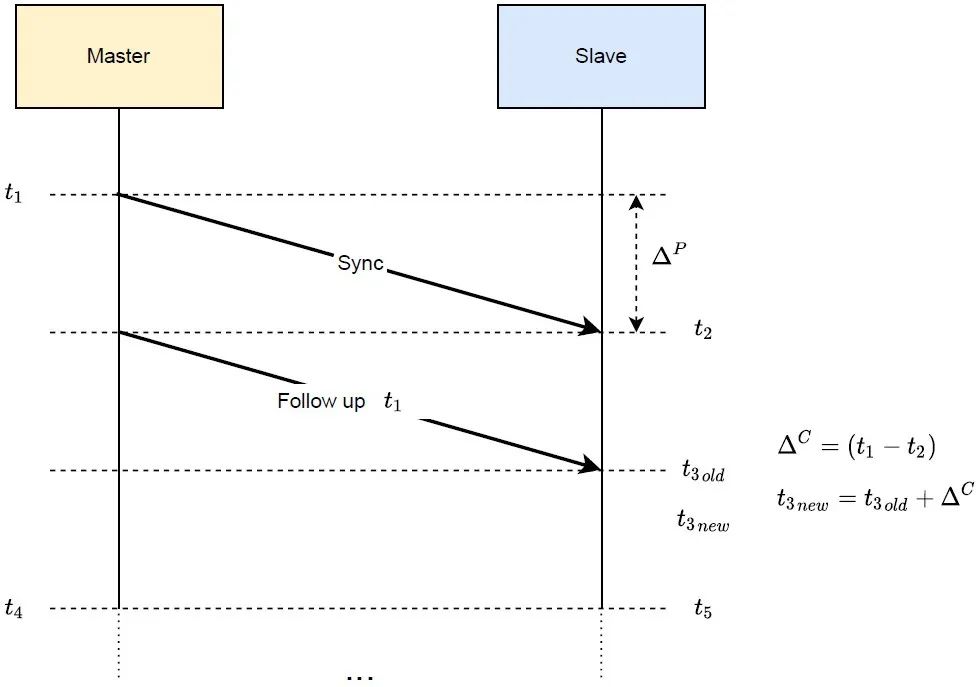
| 传播/路径延迟后续消息(Propagation / path delay Follow-Up message) |
| 时间同步消息(Time synchronization message) |
| 精确时间协议(Precision Time Protocol) |
| 通过速率适应消除时间偏移的速率(Rate for time offset elimination via Rate Adaption) |
| 校正时间基准本地实例的当前速率(Current rate for correcting the local instance of the Time Base) |
| 同步时间基准管理器(Synchronized Time Base Manager) |
| 时间基准资源(Time Base Resource) |
| 接收到的全局时间值(Received value of the Global Time) |
| 全局时间基准Time Master的当前时间(Current time of the global Time Base Time Master) |
| 全局时间基准Time Master的当前时间(Current time of the Global Time Base Time Master) |
| 时间同步。指通过时间同步协议/总线/消息进行时间同步的行为。 |
| 在应用全局时间的新值之前,Time Base本地实例的值(Value of the local instance of the Time Base before the new value of the Global Time is applied) |
| 由关联Time Base的本地实例提供的当前校正时间(Current corrected time provided by the local instance of the associated Time Base) |
| 作为函数参数给出的偏移时间基准的当前偏移(Current Offset of the Offset Time Base given as function parameter) |
| 时间同步(Time Synchronization) |
| 特定总线的时间同步提供者(A bus specific Time Synchronization Provider) |
| 由关联Time Base的本地实例提供的当前校正时间(Current corrected time provided by the local instance of the associated Time Base) |
| 由关联Time Base的本地实例提供的当前校正时间(Current corrected time provided by the local instance of the associated Time Base) |
| 虚拟本地时间的当前值(Current value of the Virtual Local Time) |
| 关联Time Base的虚拟本地时间的当前时间(Current time of the Virtual Local Time of the associated Time Base) |
| 关联Time Base的虚拟本地时间的当前时间(Current time of the Virtual Local Time of the associated Time Base) |
| 虚拟本地时间的值(Value of the Virtual Local Time) |
| 协调世界时(Coordinated Universal Time) |


 全文约8,100字,建议收藏阅读
全文约8,100字,建议收藏阅读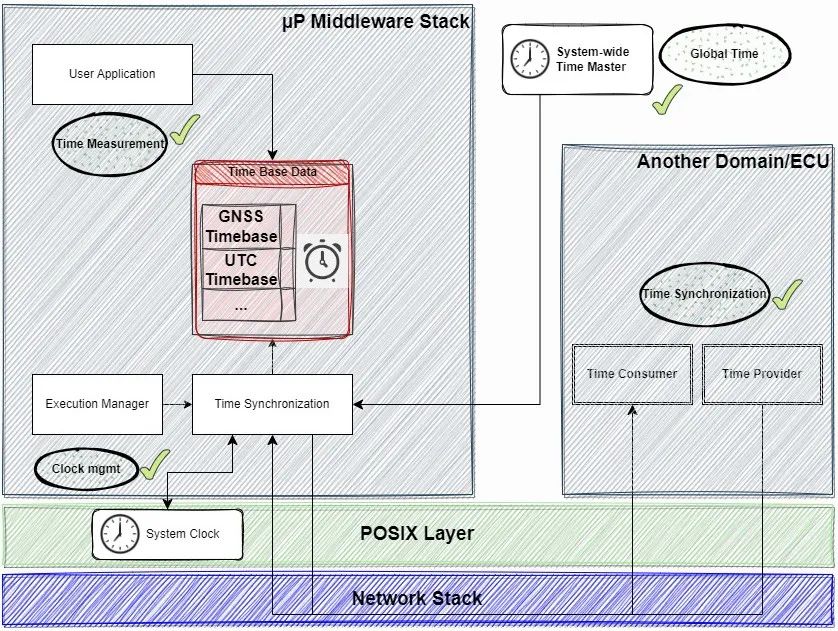
 c,并执行初步同步。
c,并执行初步同步。