注意:
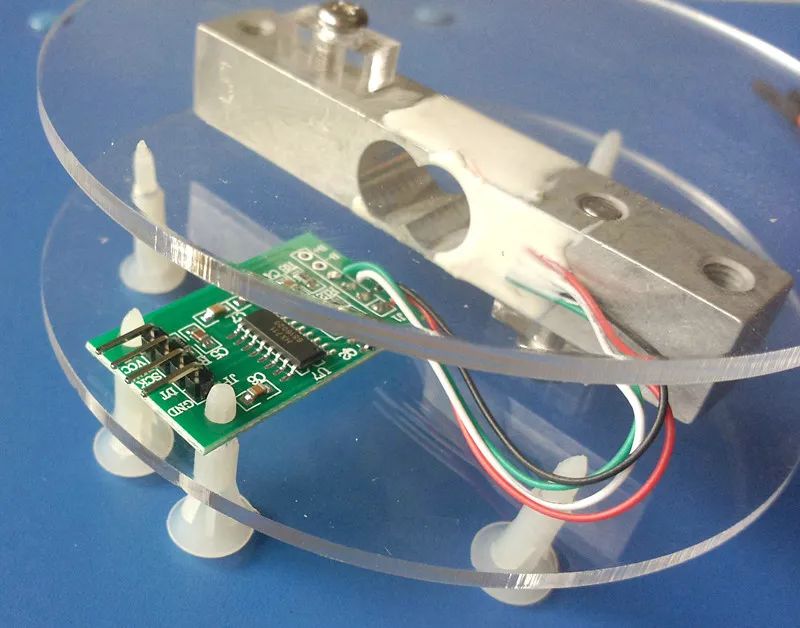
HX711 AD模块的DOUT引脚与STM32的PA6相连;
HX711 AD模块的PD_SCK引脚与STM32的PA7相连。
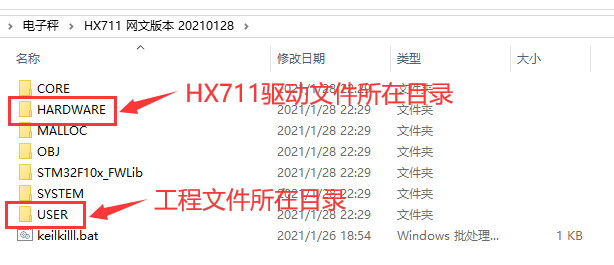
后台回复关键字“HX711”,获取HX711模块资料及工程源码。
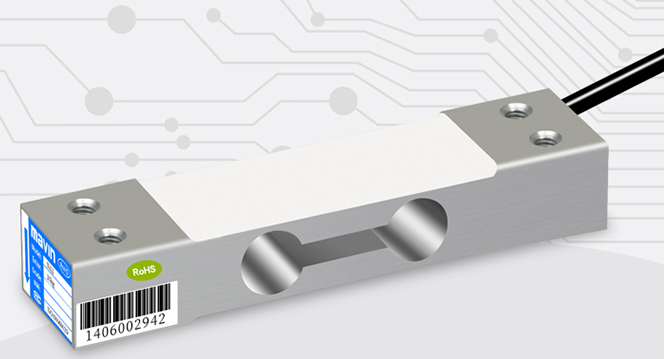
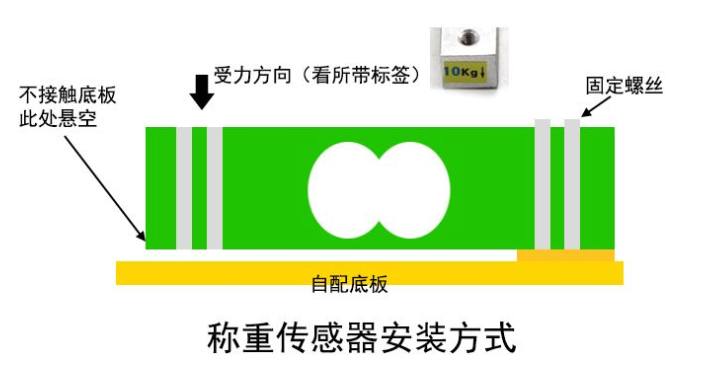
上图所示的即为压力称重传感器,其输出电压信号,压力越大输出电压信号越大 。
称重传感器采用电阻应变片桥式电路实现,主要由弹性体和电阻应变片等组成。
应用场景:
称重传感器模块有灵敏度和激励电压两个重要参数,比如两个参数的值可能为如下值:
灵敏度:1.0mV/V
激励电压:3~12V
满量程输出电压 = 激励电压 * 灵敏度
比如激励电压是5V,则输出最大电压是5mV。
电阻应变片把导体形变的物理信号转换成电阻变化的信号。
称重传感器模块上的胶基(硅橡胶)下面存放的就是应变片。
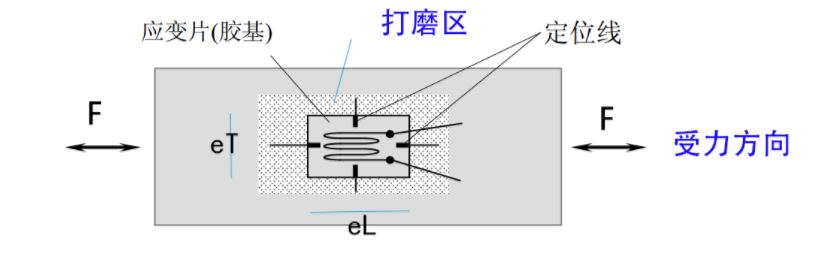
应变片一般由金属丝为材料制作的应变电阻,当金属丝受外力作用时,其长度和截面积都会发生变化,进而其电阻值即会发生改变。
当金属丝受外力作用而伸长时,其长度增加,而截面积减少,电阻值便会增大。
当金属丝受外力作用而压缩时,长度减小而截面增加,电阻值则会减小。
金属应变片对电阻丝材料有较高的要求,一般要求灵敏度系数大,电阻温系数小,具有优良的机械加工和焊接性能等,康铜是目前应用最广泛的应变丝材料。
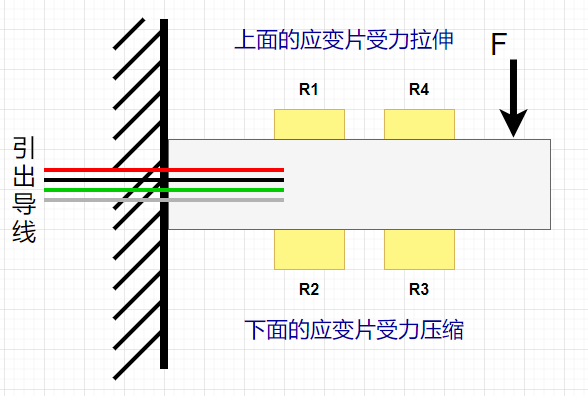
称重传感器模块上下表面各有一个应变片,每个应变片内有2个压力电阻。一共为4个压力电阻,组成全桥式电路。全桥电路可以提高所测的精度,而且电桥本身也能实现自补偿(温度补偿)。
电桥电路的被测量者的状态量一般是非常微弱的,比如在称重传感器中,就是把电阻片的电阻变化率ΔR/R转换成电压输出,然后提供给放大电路放大后进行测量。
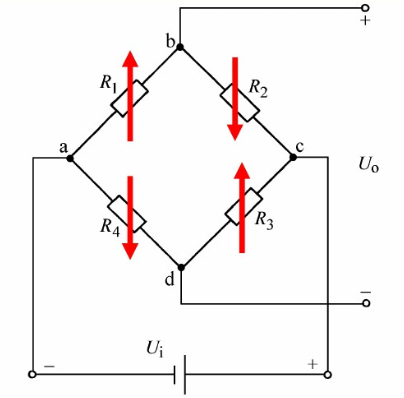
上图中的电桥电路,由四个电阻R1、R2、R3、R4组成一个四边形的回路,每一边称作电桥的“桥臂”。
a、b、c、d为四个结点,a、c结点之间接入电源,另外两个结点(b、d)之间电压差作为输出电压。
b、d点的电压相等时称为“电桥平衡”;反之,称为“电桥不平衡”。
电桥平衡的条件:上下两个桥臂的左右桥臂电阻的比例相等。
若桥路的四个桥臂相邻电阻的电阻值变化趋势相同,桥路输出电压为0。
若相邻电阻的电阻值变化趋势相反,桥路就会有电压输出。
全桥的四个桥臂都为应变片的话,由于温度变化而引起的电阻值漂移数值一致,就可以相互抵消,进而全桥能够实现温度的自补偿。
应用桥式电路可以有效提高传感器的灵敏度。
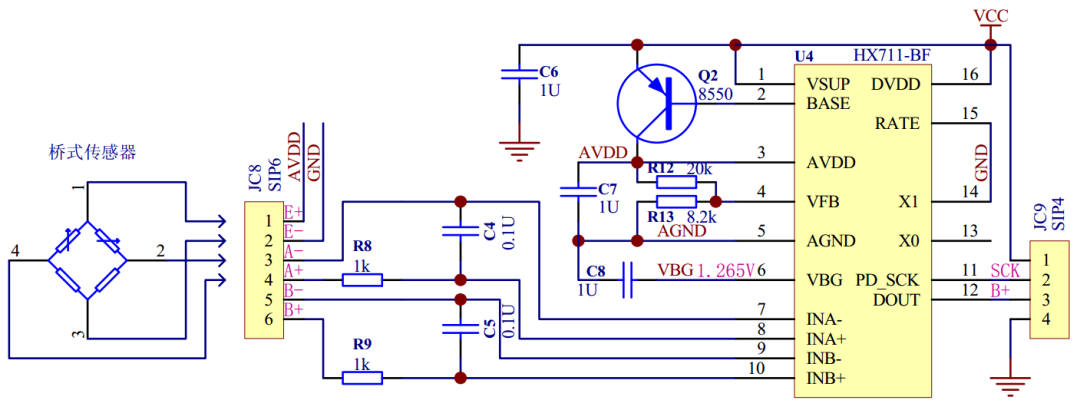
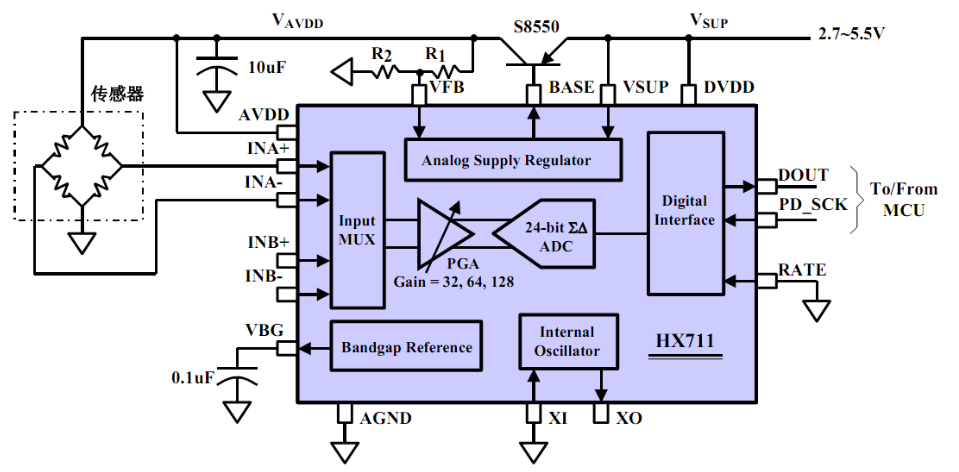
该方案使用内部时钟振荡器(XI=0),10Hz的输出数据速率(RATE=0,可配置为80Hz)。
电源(2.7~5.5V)直接取用与MCU芯片相同的供电电源。片内稳压电源电路通过片外PNP管S8550和分压电阻R12、R13向传感器和A/D转换器提供稳定的低噪声模拟电源。
通道A模拟差分输入可直接与桥式传感器的差分输出相接。
由于桥式传感器输出的信号较小,为了充分利用A/D转换器的输入动态范围,该通道的可编程增益较大,为128或64。这些增益所对应的满量程差分输入电压分别±20mV或±40mV。
通道B为固定的32增益,所对应的满量程差分输入电压为±80mV。
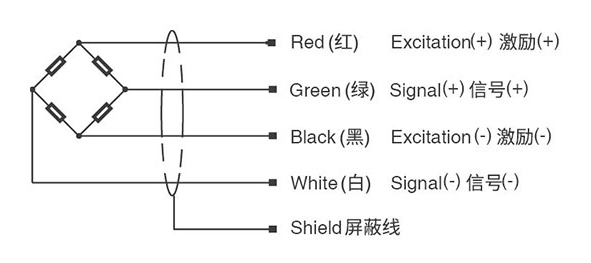
HX711 AD模块可以将电压转换为数字信号,HX711 AD模块与称重传感器接线方式:
当弹性体因承载产生形变时,电阻应变片受到拉伸或压缩而产生变形,它的阻值将发生变化(增大或减小),从而使电桥失去平衡,从而产生相应的差动信号,供后续电路(本实例是HX711)测量和转换。
应变片中的电阻丝的电阻相对变化量与材料力学中的轴向应变关系,在很大范围内是线性的。
因为受拉后应变片的阻值R的变化量很小,为了方便测量这一微小的变化量,所以采用全桥式电路可以把被测量的本底去掉,转换成一个在0值附近变化的毫伏级的输出电压,进而经过放大器之后,通过A/D转换器求得这个输出电压。
由上我们可以近似认为应力的变化和电阻的变化量成正比,我们利用这一特性,进而实现物品重量的测量。
下面我们介绍一下测量这个电压的A/D模块:HX711。
HX711是一款专为高精度电子秤而设计的24位A/D转换器芯片。与同类型其它芯片相比,该芯片集成了包括稳压电源、片内时钟振荡器等其它同类型芯片所需要的外围电路,具有集成度高、响应速度快、抗干扰性强等优点。
降低了电子秤的整机成本,提高了整机的性能和可靠性。
该芯片与后端MCU 芯片的接口和编程非常简单,所有控制信号由管脚驱动,无需对芯片内部的寄存器编程。
输入选择开关可任意选取通道A 或通道B,与其内部的低噪声可编程放大器相连。
通道A 的可编程增益为128 或64,对应的满额度差分输入信号幅值分别为±20mV或±40mV。通道B 则为固定的32 增益,常用于系统参数检测。
芯片内提供的稳压电源可以直接向外部传感器和芯片内的A/D 转换器提供电源,系统板上无需另外的模拟电源。芯片内的时钟振荡器不需要任何外接器件。上电自动复位功能简化了开机的初始化过程。
建议使用通道A与传感器相连,作为小信号输入通道;
通道B用于系统参数检测,如电池电压检测。
HX711芯片与单片机的通讯只需要两个引脚,时钟引脚PD_SCK及数据引脚DOUT,用来输出数据,选择输入通道和增益。
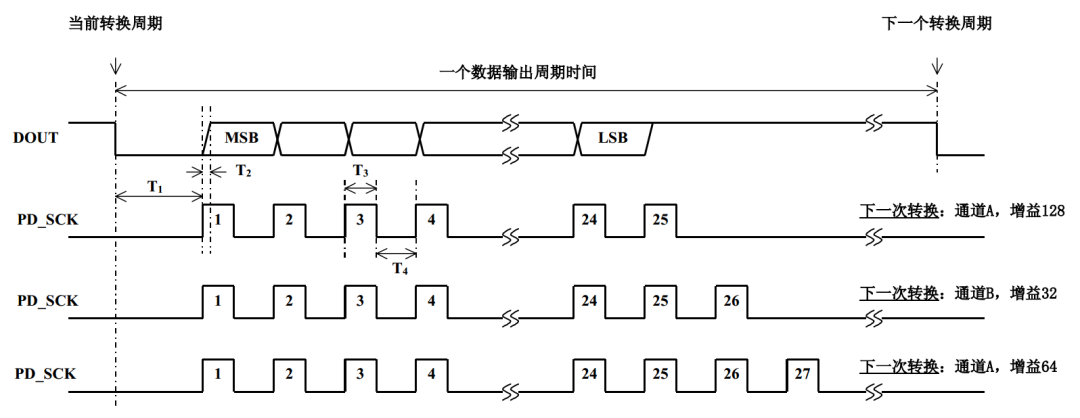
当数据输出管脚DOUT为高电平时,表明A/D转换器还未准备好输出数据,此时串口时钟输入信号PD_SCK应为低电平。当DOUT从高电平变低电平后,PD_SCK应输入25至27个不等的时钟脉冲。
其中第一个时钟脉冲的上升沿将读出输出24位数据的最高位(MSB),直至第24个时钟脉冲完成,24位输出数据从最高位至最低位逐位输出完成。
第25至27个时钟脉冲用来决定下一次A/D转换的输入通道和增益。
如下图所示,脉冲数为25个时,代表输入通道为A,增益为128倍。
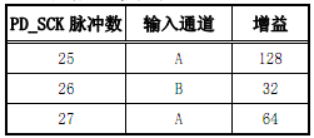
注意: 芯片上电复位之后,通道A和增益128会被自动选择作为第一次A/D转换的输入通道和增益。
通道A 的可编程增益为128 或64,对应的满额度差分输入信号幅值分别为±20mV或±40mV。
对于单片机来说,只需要通过两个普通的IO口与HX711的PD_SCK、DOUT引脚相连,并根据以上时序进行编程,即可完成对HX711芯片的控制,控制程序如下。
long HX711_Read(void) //增益128
{
long val = 0; //val为读取到的值,通过移位,一位一位读取;
unsigned char i = 0;
HX711_IN = 1;
delay_us(1);
HX711_SCK=0; //SCK=0
val = 0;
//判断模块是否准备好
while(HX711_IN);
for(i=0;i<24;i++)
{
HX711_SCK=1;
val=val<<1;
delay_us(1);
HX711_SCK=0;
if(HX711_IN)
val++;
delay_us(1);
}
HX711_SCK=1;
val = val^0x800000;
delay_us(1);
HX711_SCK=0;
delay_us(1);
return val;
}
void Get_Maopi(void)
{
Weight_Maopi = HX711_Read();
}
为了验证方便,我们在硬件上电复位的时候,获取毛重的值,即在main函数中的while(1)循环前面调用上面的函数获取毛重值,然后将此A/D值保存至全局变量Weight_Maopi中。
已知重量的物品可以选择标准砝码:

或者拿家里做糕点的电子秤:

或者拿一个已知重量的物品,比如:

因为我们这里需要对咱们自制的电子秤进行验证,所以我们选用电子秤来测量物品重量。
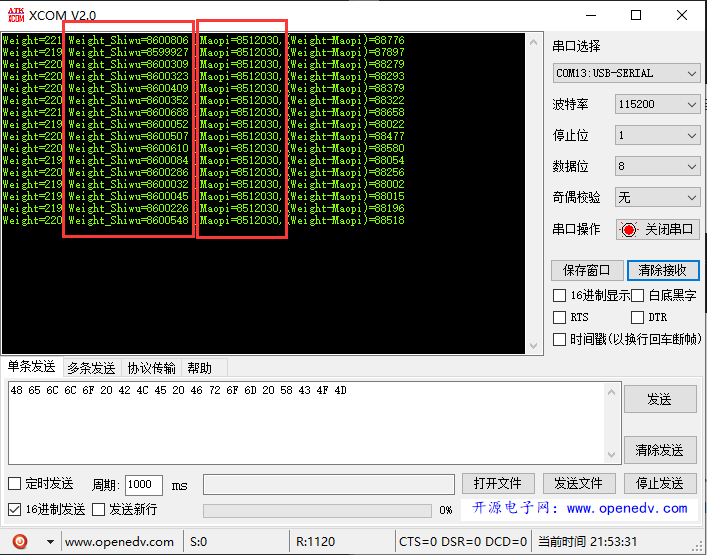
通过printf函数打印出上面变量的值:
printf("Weight=%d,Weight_Shiwu=%ld ,Maopi=%ld,(Weight-Maopi)=%ld \r\n",(int)Weight,Weight_Shiwu,Weight_Maopi,(Weight_Shiwu-Weight_Maopi));
| 物品 | 重量 | AD值 |
|---|---|---|
| 空载 | 0g | 8512030 |
| 充电宝 | 221g | 8600300 |
因为输出的A/D编码值和输出电压是成正比的,而输出电压和重量成正比,利用上面的两个值,求得AD值和重量的线性方程的K。
K = (8600300-8512030) / 221 = 88270/221 = 399.41
float Get_Weight(void)
{
float fWeight = 0.0;
Weight_Shiwu = HX711_Read();
fWeight = Weight_Shiwu-Weight_Maopi;
if(fWeight <= 0)
fWeight = 0;
fWeight = ((float)fWeight/dK);
return fWeight;
}
代码中的dK即为上面求得线性方程的K,其中Weight_Shiwu为当前电子秤上物品的A/D值,Weight_Maopi为空载不放物品的时候的A/D值。两个A/D值的差值与K的商即为待测物品的重量。
Get_Weight() 函数的返回值即为求得的真实重量,单位g。
此外,程序可以增加的功能还有:
今天主要介绍一下称重传感器模块的使用,下面内容大家可以思考一下。
模块虽小,内容倒很多,哪里有理解不到位的地方,欢迎留言区指出,以免误导大家。
点个“赞”和“在看”呗
一个专注于嵌入式知识分享,学习路上不迷路的公众号,欢迎关注。
想加技术交流群的,可以扫码加我微信,我拉你进群。
