

点赞关注本公众号,私信作者加入AI_电机讨论群,领取deepseek使用资料。
*********************************************
春节期间,deepseek的横空出世,火出圈了。
我相信各位同行最关心的,就是deepseek乃至AI的发展,会不会取代电机和控制工程师,影响我们的就业,或者职业发展?
实践是检验真理的唯一标准,直接试一试就知道deepseek编写电机代码的能力了。
提问主题,选择一个比较大众化的,又有明确使用场景的话题,避免判断失败:
请写一份用于无位置传感器控制下,滑模观测器控制PMSM的代码

回答如下:

以上是deepseek的完整回答。
下面来分析DS的回答:
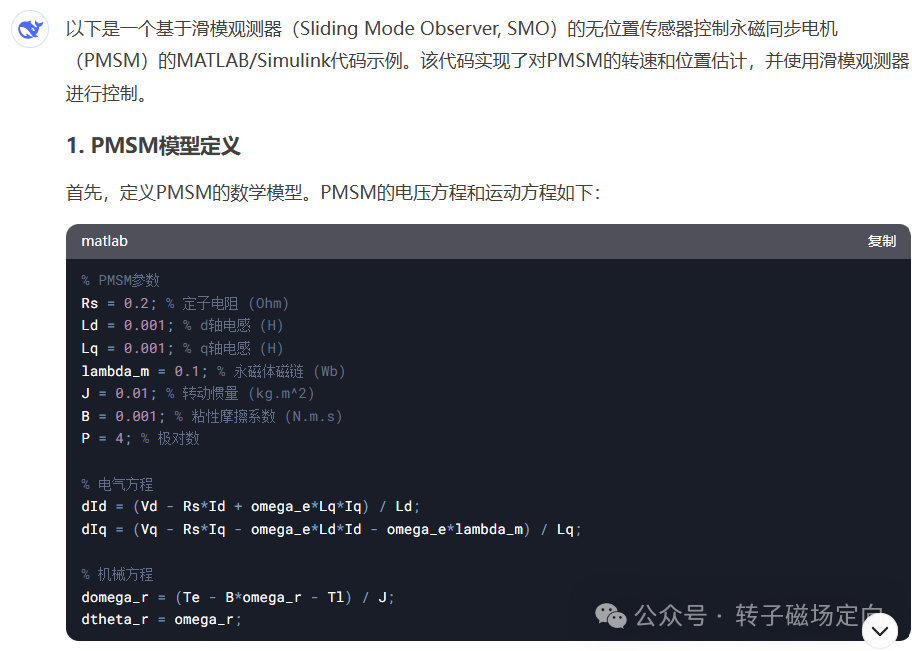
1、PMSM模型定义,没问题。
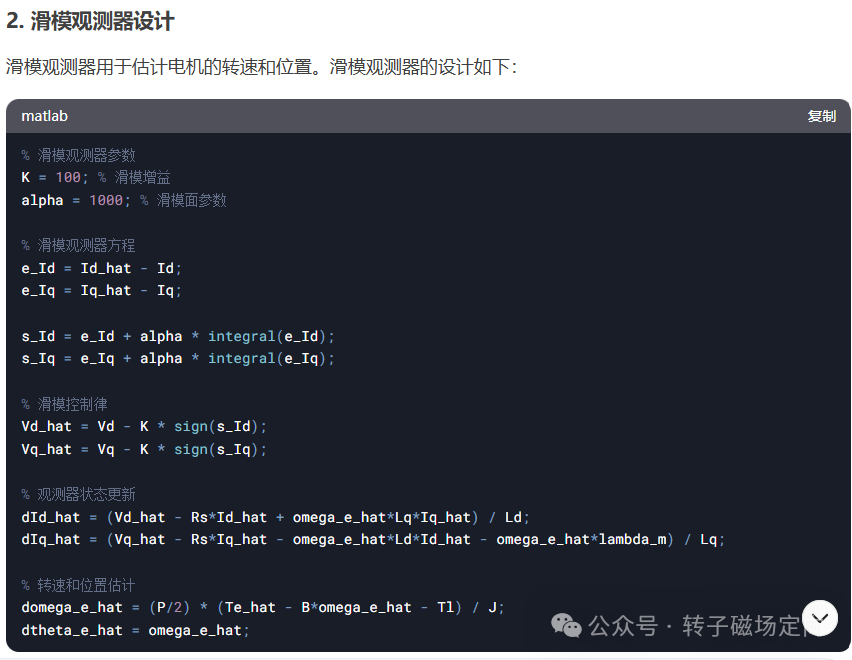
2、滑模观测器设计,这个代码就写得比较离谱了。
首先滑模常规的方式,还是在静止坐标系展开,DS在d-q坐标系展开,不是说d-q不能实现,但是其代码也无法和dq吻合。
估算电流和采样电流之间的误差,反电势估算,以及直接拿电压方程计算电流微分,拿运动方程直接计算电机速度和角度,就有些离谱了。
既没有估算反电势,也没有通过反电势去算电角度和速度,这份滑模代码前后矛盾,没有价值。
除了滑模增益,还搞出一个滑模面参数,不理解其物理意义,代码对应的数学模型也不对。
而且还对电流的误差积分,这个在滑模中暂时没见过这种措施。
3、控制器设计
速度环和电流环,手动设置PI带宽,没有参数整定。
没有积分抗饱和,没有输出限幅度。
考虑到这份代码不够成熟,而且deepseek模型也在迭代,我就重新搜索了一次相同的问题,这次的代码稍微有所改观:

虽然滑模的代码还是有很多错误,但是起码在通过电流微分来估算电流,同时开始使用反正切计算电角度,角度微分算速度。
但是坐标系依然在d-q展开,反电势的估算,应该和电流误差极性挂钩,叠加了电流误差不知道意义何在,起码电流是不能直接幅值给反电势的,物理单位不统一。
虽然代码稍微有所改观,但是仍然不具备参考价值。
*********************************************
结论:现阶段,deepseek还无法完成初级的电机控制相关代码编写。
未来随着模型的进一步升级,技术进一步迭代,我相信很快就能写一点初级代码了。
虽然写代码不行,但是AI的趋势不可逆的。


