



舍不得我的GPU
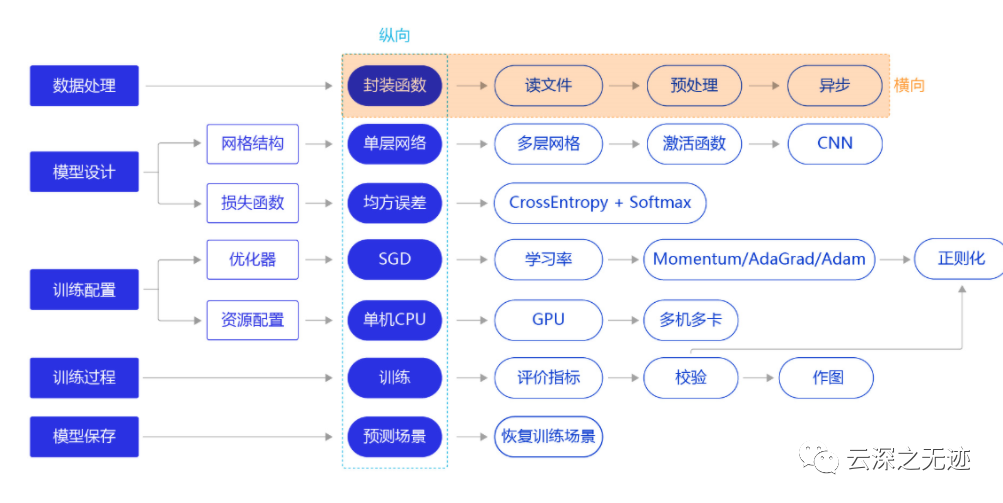
这次横向逐步进行优化
在前文中,我们直接用API导入了数据,但是现实中,搬砖环境千变万化,我们总是要拿自己的数据的处理的:
读入数据
划分数据集
生成批次数据
训练样本集乱序
校验数据有效性
import paddleimport paddle.fluid as fluidfrom paddle.fluid.dygraph.nn import Linearimport numpy as npimport osimport gzipimport jsonimport random
导入一些工具库
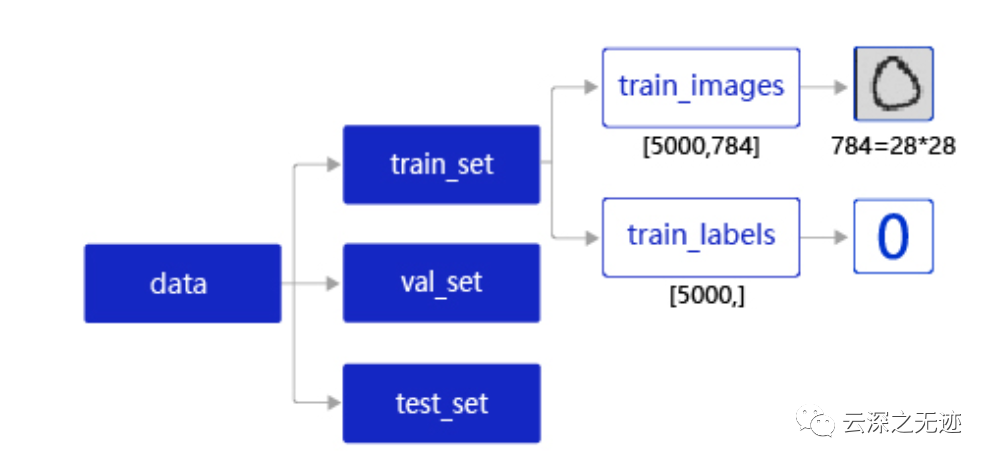
数据集的储存结构
data包含三个元素的列表:train_set、val_set、 test_set。
train_set(训练集):包含50000条手写数字图片和对应的标签,用于确定模型参数。
val_set(验证集):包含10000条手写数字图片和对应的标签,用于调节模型超参数(如多个网络结构、正则化权重的最优选择)。
test_set(测试集):包含10000条手写数字图片和对应的标签,用于估计应用效果(没有在模型中应用过的数据,更贴近模型在真实场景应用的效果)。
train_set包含两个元素的列表:train_images、train_labels。
train_images:[5000, 784]的二维列表,包含5000张图片。每张图片用一个长度为784的向量表示,内容是28*28尺寸的像素灰度值(黑白图片)。
train_labels:[5000, ]的列表,表示这些图片对应的分类标签,即0-9之间的一个数字。
# 声明数据集文件位置datafile = './work/mnist.json.gz'print('loading mnist dataset from {} ......'.format(datafile))# 加载json数据文件data = json.load(gzip.open(datafile))print('mnist dataset load done')# 读取到的数据区分训练集,验证集,测试集train_set, val_set, eval_set = data# 数据集相关参数,图片高度IMG_ROWS, 图片宽度IMG_COLSIMG_ROWS = 28IMG_COLS = 28# 打印数据信息imgs, labels = train_set[0], train_set[1]print("训练数据集数量: ", len(imgs))# 观察验证集数量imgs, labels = val_set[0], val_set[1]print("验证数据集数量: ", len(imgs))# 观察测试集数量imgs, labels = val= eval_set[0], eval_set[1]print("测试数据集数量: ", len(imgs))
读取以及拆分的代码
训练样本乱序: 先将样本按顺序进行编号,建立ID集合index_list。然后将index_list乱序,最后按乱序后的顺序读取数据。
说明:
通过大量实验发现,模型对最后出现的数据印象更加深刻。训练数据导入后,越接近模型训练结束,最后几个批次数据对模型参数的影响越大。为了避免模型记忆影响训练效果,需要进行样本乱序操作。
生成批次数据: 先设置合理的batch_size,再将数据转变成符合模型输入要求的np.array格式返回。同时,在返回数据时将Python生成器设置为yield模式,以减少内存占用。
在执行如上两个操作之前,需要先将数据处理代码封装成load_data函数,方便后续调用。load_data有三种模型:train、valid、eval,分为对应返回的数据是训练集、验证集、测试集。
imgs, labels = train_set[0], train_set[1]print("训练数据集数量: ", len(imgs))# 获得数据集长度imgs_length = len(imgs)# 定义数据集每个数据的序号,根据序号读取数据index_list = list(range(imgs_length))# 读入数据时用到的批次大小BATCHSIZE = 100# 随机打乱训练数据的索引序号random.shuffle(index_list)# 定义数据生成器,返回批次数据def data_generator():imgs_list = []labels_list = []for i in index_list:# 将数据处理成希望的格式,比如类型为float32,shape为[1, 28, 28]img = np.reshape(imgs[i], [1, IMG_ROWS, IMG_COLS]).astype('float32')label = np.reshape(labels[i], [1]).astype('float32')imgs_list.append(img)labels_list.append(label)if len(imgs_list) == BATCHSIZE:# 获得一个batchsize的数据,并返回yield np.array(imgs_list), np.array(labels_list)# 清空数据读取列表imgs_list = []labels_list = []# 如果剩余数据的数目小于BATCHSIZE,# 则剩余数据一起构成一个大小为len(imgs_list)的mini-batchif len(imgs_list) > 0:yield np.array(imgs_list), np.array(labels_list)return data_generator

# 声明数据读取函数,从训练集中读取数据train_loader = data_generator# 以迭代的形式读取数据for batch_id, data in enumerate(train_loader()):image_data, label_data = dataif batch_id == 0:# 打印数据shape和类型print("打印第一个batch数据的维度:")print("图像维度: {}, 标签维度: {}".format(image_data.shape, label_data.shape))break

在实际应用中,原始数据可能存在标注不准确、数据杂乱或格式不统一等情况。因此在完成数据处理流程后,还需要进行数据校验,一般有两种方式:
机器校验:加入一些校验和清理数据的操作。
人工校验:先打印数据输出结果,观察是否是设置的格式。再从训练的结果验证数据处理和读取的有效性。
imgs_length = len(imgs)assert len(imgs) == len(labels), \"length of train_imgs({}) should be the same as train_labels({})".format(len(imgs), len(label))
# 声明数据读取函数,从训练集中读取数据train_loader = data_generator# 以迭代的形式读取数据for batch_id, data in enumerate(train_loader()):image_data, label_data = dataif batch_id == 0:# 打印数据shape和类型print("打印第一个batch数据的维度,以及数据的类型:")print("图像维度: {}, 标签维度: {}, 图像数据类型: {}, 标签数据类型: {}".format(image_data.shape, label_data.shape, type(image_data), type(label_data)))break
再放一个人工校验的:
人工校验是指打印数据输出结果,观察是否是预期的格式。实现数据处理和加载函数后,我们可以调用它读取一次数据,观察数据的shape和类型是否与函数中设置的一致。
def load_data(mode='train'):datafile = './work/mnist.json.gz'print('loading mnist dataset from {} ......'.format(datafile))# 加载json数据文件data = json.load(gzip.open(datafile))print('mnist dataset load done')# 读取到的数据区分训练集,验证集,测试集train_set, val_set, eval_set = dataif mode=='train':# 获得训练数据集imgs, labels = train_set[0], train_set[1]elif mode=='valid':# 获得验证数据集imgs, labels = val_set[0], val_set[1]elif mode=='eval':# 获得测试数据集imgs, labels = eval_set[0], eval_set[1]else:raise Exception("mode can only be one of ['train', 'valid', 'eval']")print("训练数据集数量: ", len(imgs))# 校验数据imgs_length = len(imgs)assert len(imgs) == len(labels), \"length of train_imgs({}) should be the same as train_labels({})".format(len(imgs), len(label))# 获得数据集长度imgs_length = len(imgs)# 定义数据集每个数据的序号,根据序号读取数据index_list = list(range(imgs_length))# 读入数据时用到的批次大小BATCHSIZE = 100# 定义数据生成器def data_generator():if mode == 'train':# 训练模式下打乱数据random.shuffle(index_list)imgs_list = []labels_list = []for i in index_list:# 将数据处理成希望的格式,比如类型为float32,shape为[1, 28, 28]img = np.reshape(imgs[i], [1, IMG_ROWS, IMG_COLS]).astype('float32')label = np.reshape(labels[i], [1]).astype('float32')imgs_list.append(img)labels_list.append(label)if len(imgs_list) == BATCHSIZE:# 获得一个batchsize的数据,并返回yield np.array(imgs_list), np.array(labels_list)# 清空数据读取列表imgs_list = []labels_list = []# 如果剩余数据的数目小于BATCHSIZE,# 则剩余数据一起构成一个大小为len(imgs_list)的mini-batchif len(imgs_list) > 0:yield np.array(imgs_list), np.array(labels_list)return data_generator
怕流程太复杂,那就写一个打包的函数就是这样~
#数据处理部分之后的代码,数据读取的部分调用Load_data函数# 定义网络结构,同上一节所使用的网络结构class MNIST(fluid.dygraph.Layer):def __init__(self):super(MNIST, self).__init__()self.fc = Linear(input_dim=784, output_dim=1, act=None)def forward(self, inputs):inputs = fluid.layers.reshape(inputs, (-1, 784))outputs = self.fc(inputs)return outputs# 训练配置,并启动训练过程with fluid.dygraph.guard():model = MNIST()model.train()#调用加载数据的函数train_loader = load_data('train')optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.001, parameter_list=model.parameters())EPOCH_NUM = 10for epoch_id in range(EPOCH_NUM):for batch_id, data in enumerate(train_loader()):#准备数据,变得更加简洁image_data, label_data = dataimage = fluid.dygraph.to_variable(image_data)label = fluid.dygraph.to_variable(label_data)#前向计算的过程predict = model(image)#计算损失,取一个批次样本损失的平均值loss = fluid.layers.square_error_cost(predict, label)avg_loss = fluid.layers.mean(loss)#每训练了200批次的数据,打印下当前Loss的情况if batch_id % 200 == 0:print("epoch: {}, batch: {}, loss is: {}".format(epoch_id, batch_id, avg_loss.numpy()))#后向传播,更新参数的过程avg_loss.backward()optimizer.minimize(avg_loss)model.clear_gradients()#保存模型参数fluid.save_dygraph(model.state_dict(), 'mnist')
定义一个神经网络层,然后开始训练
因为代码没有更改,所以.一样的lose
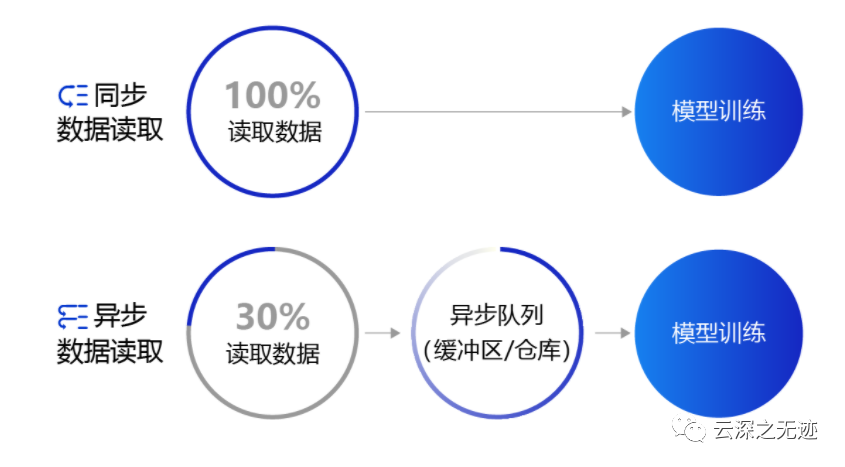
同步和异步的数据读取方式
上面提到的数据读取采用的是同步数据读取方式。对于样本量较大、数据读取较慢的场景,建议采用异步数据读取方式。
异步读取数据时,数据读取和模型训练并行执行,从而加快了数据读取速度,牺牲一小部分内存换取数据读取效率的提升
同步数据读取:数据读取与模型训练串行。当模型需要数据时,才运行数据读取函数获得当前批次的数据。在读取数据期间,模型一直等待数据读取结束才进行训练,数据读取速度相对较慢。
异步数据读取:数据读取和模型训练并行。读取到的数据不断的放入缓存区,无需等待模型训练就可以启动下一轮数据读取。当模型训练完一个批次后,不用等待数据读取过程,直接从缓存区获得下一批次数据进行训练,从而加快了数据读取速度。
异步队列:数据读取和模型训练交互的仓库,二者均可以从仓库中读取数据,它的存在使得两者的工作节奏可以解耦。
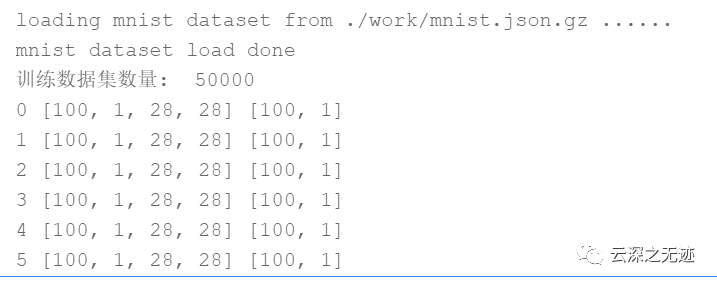
# 定义数据读取后存放的位置,CPU或者GPU,这里使用CPU# place = fluid.CUDAPlace(0) 时,数据读取到GPU上place = fluid.CPUPlace()with fluid.dygraph.guard(place):# 声明数据加载函数,使用训练模式train_loader = load_data(mode='train')# 定义DataLoader对象用于加载Python生成器产生的数据data_loader = fluid.io.DataLoader.from_generator(capacity=5, return_list=True)# 设置数据生成器data_loader.set_batch_generator(train_loader, places=place)# 迭代的读取数据并打印数据的形状for i, data in enumerate(data_loader):image_data, label_data = dataprint(i, image_data.shape, label_data.shape)if i>=5:break
飞桨的异步读取是这样的
与同步数据读取相比,异步数据读取仅增加了三行代码,如下所示。
place = fluid.CPUPlace()
# 设置读取的数据是放在CPU还是GPU上。
data_loader = fluid.io.DataLoader.from_generator(capacity=5, return_list=True)
# 创建一个DataLoader对象用于加载Python生成器产生的数据。数据会由Python线程预先读取,并异步送入一个队列中。
data_loader.set_batch_generator(train_loader, place)
# 用创建的DataLoader对象设置一个数据生成器set_batch_generator,输入的参数是一个Python数据生成器train_loader和服务器资源类型place(标明CPU还是GPU)
fluid.io.DataLoader.from_generator参数名称和含义如下:
feed_list:仅在PaddlePaddle静态图中使用,动态图中设置为“None”,本教程默认使用动态图的建模方式;
capacity:表示在DataLoader中维护的队列容量,如果读取数据的速度很快,建议设置为更大的值;
use_double_buffer:是一个布尔型的参数,设置为“True”时,Dataloader会预先异步读取下一个batch的数据并放到缓存区;
iterable:表示创建的Dataloader对象是否是可迭代的,一般设置为“True”;
return_list:在动态图模式下需要设置为“True”。
异步数据读取并训练的完整案例代码如下
with fluid.dygraph.guard():model = MNIST()model.train()#调用加载数据的函数train_loader = load_data('train')# 创建异步数据读取器place = fluid.CPUPlace()data_loader = fluid.io.DataLoader.from_generator(capacity=5, return_list=True)data_loader.set_batch_generator(train_loader, places=place)optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.001, parameter_list=model.parameters())EPOCH_NUM = 3for epoch_id in range(EPOCH_NUM):for batch_id, data in enumerate(data_loader):image_data, label_data = dataimage = fluid.dygraph.to_variable(image_data)label = fluid.dygraph.to_variable(label_data)predict = model(image)loss = fluid.layers.square_error_cost(predict, label)avg_loss = fluid.layers.mean(loss)if batch_id % 200 == 0:print("epoch: {}, batch: {}, loss is: {}".format(epoch_id, batch_id, avg_loss.numpy()))avg_loss.backward()optimizer.minimize(avg_loss)model.clear_gradients()fluid.save_dygraph(model.state_dict(), 'mnist')
